
Fターム[3D232DA22]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 位置 (74)
Fターム[3D232DA22]に分類される特許
1 - 20 / 74
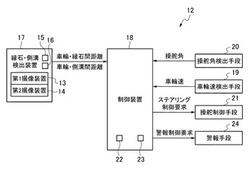
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
車線維持支援装置

【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力及び回避軌道を導出する。
【解決手段】所望の位置、該位置での速度の方向、及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、自車両と所望の位置との距離のx成分Xe、距離のy成分Ye、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を求めるために導入した第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、第3の導入パラメータη3の特定仮定下での値η3’との関係を定めた低速化3次元マップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を導出する。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
駐車支援装置
【課題】表示手段において路面の状況を容易に把握しながら車体を目標位置において精度高く停車させ得る駐車支援装置を構成する。
【解決手段】車体を駐車目標エリアFに導入する駐車支援制御を行う際に駐車目標エリアFに最終停車目標位置Pxが設定されると、車体に備えたカメラで進行方向の路面を撮影した撮影画像をモニタ21に表示し、モニタ21に表示された撮影画像には指標Qが表示される。この指標Qは、車体が最終停車目標位置Pxに到達した際に、車体のバンパーの上側の輪郭30Eの形状に合致する形状で、最終停車目標位置Pxに対応する位置に重畳表示される。
(もっと読む)
後退駐車支援制御装置および後退駐車支援制御装置用のプログラム
【課題】車載カメラによって撮影された車両後方画像から駐車枠線を検出する技術において、ドライバの運転負担を軽減すると共に、車両の後退開始位置までの車両の変位量を検出する必要性を低減する。
【解決手段】後退駐車支援制御装置が、撮影画像から、駐車枠探索範囲のウインドウ31、32を抽出し、抽出されたウインドウの範囲内で、駐車枠線を検出するようになっており、ウインドウ31、32の抽出時は、車両1の現在のステアリング角で基準距離Lだけ後退したと仮定した場合の車両1’の後端部の近傍に限定して、ウインドウ31、32を抽出する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
走行支援装置および走行支援方法
【課題】走行支援する経路上に物体があるかを少ない処理コストで判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域を、車両1の走行領域とみなすことができるので、各走行制御点Qごとに、その車両1の障害物判定領域E内に障害物が存在するか否かを判定することで、走行経路RT1〜RT3上に障害物が存在するか否かを判定できる。従って、車両1が実際に走行する走行領域F1を算出しなくて済むので、複雑な領域の計算を行わなくて良く、処理コストを抑制できる。その結果、走行支援する経路上に障害物があるかを少ない処理コストで判定できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】少ない処理コストで初期位置から目標位置までの車両の走行経路を運転者に提供できる走行支援装置および走行支援方法を提供すること。
【解決手段】本実施形態では、経路パターンPT1〜PT10の組み合わせに基づいて、2m間隔で大まかに経路点Pを生成し走行経路RT1を生成しても、その後、走行経路RT1の各経路点P間に、0.05m間隔で仮想的に走行制御点Qを生成できる。よって、経路パターンPT1〜PT10に対応する各走行経路の長さCLを短く(例えば、0.05mなど)しておき、詳細に走行経路RT1を生成したり、経路パターンPT1〜PT10のパターンの種類を多数設けて記憶しておく必要が無いので、処理コストを抑制できる。従って、走行支援装置100によれば、少ない処理コストで初期位置から目標位置までの車両の走行経路RT1〜RT3を運転者に提供できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】車両が通過する予定の領域を精度良く、且つ、容易に設定して、その領域に物体が存在するか否かを判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域は、車両1が実際に走行する走行領域F1の一部となるので、障害物判定領域Eを全て足し合わせた領域F3を、車両1の走行領域とみなすことができる。従って、車両1が実際に走行する領域F2を算出しなくても、走行経路RT1〜RT3に対応する走行領域を精度良く、且つ、容易に設定でき、その走行経路RT1〜RT3に対応する走行経路内に、障害物が有るか否かを判定できる。
(もっと読む)
ドライバーアシスト方法
【課題】従来技術によるドライバーアシスト方法および装置の欠点を改善すること。
【解決手段】センサを用いて車両周辺が検出され、検出された車両周辺が少なくとも部分的に指示部に表示され、車両を移動させるドライブアシストが現在のポジションから出発して車両の目標ポジションに達するように行われる、車両に対するドライブアシスト方法において、
目標ポジションが指示部に表示されかつ目標ポジションは入力ユニットを用いて指示部における車両周辺の表示においてシフトされるおよび/または回転され、
カメラユニットによって実際の周辺表示が作成され、実際の周辺表示に前記目標ポジションがフェードインされる
ことを特徴とする方法。
(もっと読む)
車両の駐車支援システム
【課題】演算負荷を低減し、コスト増を回避しつつ、1回の切り返しのみならず、複数の切り返しで駐車スペースに車両を自動的に駐車させることができる駐車支援の手法を提供する。
【解決手段】自動操舵によって駐車させるシステムは、駐車スペースの幅および該駐車スペースに面している道路の幅を検出する。1回の切り返しにより駐車スペースに駐車させる駐車経路および複数の切り返しにより駐車スペースに駐車させる駐車経路が、駐車スペースの幅および該駐車スペースに面した道路の幅に従って予め定義された駐車経路テーブル41が設けられる。検出された駐車スペースおよび道路の幅に基づいて、駐車経路の候補を駐車経路テーブル41から読み出す。駐車のために前記車両が停車したときに特定された車両の位置に基づいて、該読み出した駐車経路の候補のうちの1つを選択する。該選択した駐車経路に従って車両を誘導するよう、該車両のステアリングを駆動する。
(もっと読む)
車両挙動センサの中点補正方法
【課題】中点学習を必要とし、車両走行中に中点学習を実施する車両挙動センサの誤学習の発生を抑制できる中点補正方法を提供する。
【解決手段】車両挙動センサの中点補正方法は、車両挙動センサの出力値から中点補正値が順次算出される中点補正算出工程と、中点補正値として略同等の値が連続して算出された場合には中点補正が実施され、前回の中点補正値と今回の中点補正値とが異なる場合には中点補正が実施されない中点補正判定工程とを有する。
(もっと読む)
駐車支援装置
【課題】駐車目標位置に車両を導入する際に障害物等を避けた切り返しが可能となる駐車支援装置を構成する。
【解決手段】停車位置から駐車目標エリアGに車両30を直接的に誘導する直接誘導制御を行えない場合に切り返し誘導制御を設定する。切り返し誘導制御では、停車位置から駐車目標エリアGの近傍まで補助誘導経路K1に沿って車両30を誘導する。次に、人為操舵による前進を許し、この前進時に駐車目標エリアGに直接的な誘導が可能である場合には報知を行い、この報知で停車した後には、最終誘導経路K3に沿って車両30を誘導する。
(もっと読む)
車両用転舵制御装置
【課題】車両を走行中の車線上から逸脱しにくくすることにある。
【解決手段】自車位置検出手段が、走行中の車線上での車両の車線幅方向の位置を検出し、また操舵方向検出手段1が、ステアリングホイールの操舵方向を検出し、そしてヨー角制御手段3が、ステアリングホイールの操舵方向が車両を走行中の車線上から逸脱させる方向である場合の方が車両を走行中の車線上の車線幅方向目標位置に接近させる方向である場合より、ステアリングホイールの操舵角に対する車両のヨー角変化を小さくすることを特徴とする車両用転舵制御装置である。
(もっと読む)
車線維持支援システム
【課題】煩雑な操舵操作を招くことのない車線維持支援システムを提供すること。
【解決手段】本発明による車線維持支援システム1は、車両Cの前方を撮像する撮像手段10と、撮像手段10の撮像した前方の画像から車両Cの前方の車線中央に対する車両のオフセット距離及び偏向角と、車線中央の曲率を検出する検出手段8aと、オフセット距離及び偏向角と曲率に基づいて車両を車線中央に維持するように車両の操舵装置6を制御する操舵制御装置に操舵指令を出力する車線維持手段8bとを備えるとともに、操舵装置6が入力側の駆動軸2の入力側操舵角を出力側の駆動軸4の出力側操舵角で除したギア比を可変とする操舵角可変機構3を備え、検出手段8aが検出した曲率に基づいてギア比を変更するギア比変更手段8cを備えることを特徴とする。
(もっと読む)
走行支援装置
【課題】滑らかな操舵感を実現しつつ、車両の車線逸脱を抑制することができる走行支援装置を提供する。
【解決手段】目標軌道40上の目標地点401,…,40Nと、車両2が現時点以降に走行すると予測される走行軌道42上の2個以上の走行地点421,…,42Nとの横方向誤差が減少するよう2個以上の補正量を演算し、演算した補正量に基づいて車両2の操舵状態を補正することを繰り返す。このため、車両2の操舵状態は、最終的な目標地点40Nへ一直線状に車両2が移動するよう補正されるのではなく、走行軌道442のように曲線状に車両2が移動するよう補正される。従って、車両2の車両挙動の急変を抑制して、運転者が違和感を覚えない滑らかな操舵感を実現しつつ、車両2の横方向誤差を減少させて、車線4からの車両2の逸脱を抑制することができる。
(もっと読む)
1 - 20 / 74
[ Back to top ]