
Fターム[3D232DA25]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 前後加速度(ジャークを含む) (471)
Fターム[3D232DA25]に分類される特許
461 - 471 / 471
駐車支援装置

【課題】 誘導可能な初期位置・姿勢の範囲を拡大した駐車支援装置を提供する。
【解決手段】 駐車位置Gに対する車両の初期位置Aを測定して、A点からG点への経路を生成し、これにに基づいて自動操舵または運転者の操舵支援を行うことで車両の誘導を行う駐車支援装置において、任意の偏向角からG点での偏向角へと移行する基本経路と、A点とG点との位置関係と、からA点からG点へと至る経路生成を可能とする上記任意の偏向角が満たすべき条件を求め、設定した条件から目標偏向角θpを設定し、A点から偏向角をこの目標偏向角θpへと修正するB点を通る誘導経路を算出してこれに基づいて車両を誘導する。
(もっと読む)
自動車両の走行安定性を向上させるための方法
本発明は、自動車両の走行安定性を向上させるための方法、それに対応する装置、及びコンピュータプログラム製品に関する。従来技術に比べてより迅速に応答し且つそれによりその信頼性に関して改善された、自動車両を安定化させる方法、並びにそれに対応する装置を創作するために、自動車両に加えられる、安定させるヨーモーメントを決定するために、モデルサポート式の事前制御が利用されることが提案される。  (もっと読む)
(もっと読む)
操舵反力制御装置

【課題】 車両の加減速時に不整挙動が発生した際のステアフィールを向上できる操舵反力制御装置を提供する。
【解決手段】 車両の運転者が操作する操作子に発生させるべき反力成分を制御する操舵反力制御装置において、前記車両の挙動を検出するヨーレートセンサ18と、前記車両の前後加速度を検出する前後加速度センサ41と、前記ヨーレートセンサ18の検出値が大きいほど前記反力成分を大きく設定し、かつ前記前後加速度センサ41の検出値が大きいほど前記反力成分を大きく設定する反力補正部33と、を備える。
(もっと読む)
車両の操舵装置
【課題】 運転者による操舵ハンドルの回動操作を容易とするとともに、中立位置近傍における操舵ハンドルの不意な回動を防止する車両の操舵装置を提供すること。
【解決手段】 操舵反力付与装置13は操舵ハンドル11に対して操舵角θに比例した反力トルクTzが付与する。電子制御ユニット35は操舵角θと指数関係にある目標転舵角δdを計算する。この計算によれば、操舵ハンドル11が中立位置近傍で僅かに回動された場合には目標転舵角δdが小さく計算される。したがって、中立位置近傍にて操舵ハンドルが不意に回動しても車両のふらつきを防止することができる。また、操舵ハンドル11が中立位置近傍外で回動された場合には目標転舵角δdが大きく計算される。したがって、操舵ハンドル11の回動操作範囲を小さくすることができ、比例関数的に付与される反力トルクTzが極めて大きくなることを防止できる。
(もっと読む)
操舵トルクを決定する方法
本発明は、自動車のハンドル用の操舵トルクを決定することを可能にする方法に関する。かじ取り角が、操舵された車輪について、ハンドルを用いて運転者によって予め規定される。車軸に対する力を表す操舵トルクが、ハンドルに作用する。本発明によれば、手動トルク(M_soll)が、少なくとも1つの軸モデルを用いて決定される。次いで、手動トルクは、操舵トルク(M_ist)に重ね合わされる。  (もっと読む)
(もっと読む)
車両用内輪空転防止制御装置
【課題】 フィードバック制御に伴う過渡応答や振動等を発生させることなく、旋回内輪空転を未然に防ぐことができる車両用内輪空転防止制御装置を提供する。
【解決手段】 ブレーキペダルの操作とは独立して各車輪のブレーキ液圧を可変するブレーキアクチュエータ6と、ステアリングギア比を可変する前輪操舵アクチュエータ5と、を備えた車両用内輪空転防止制御装置において、内輪が空転するかどうかを予測する内輪空転判断手段と、内輪が空転すると判断されたとき、ブレーキアクチュエータ7に対し、各車輪のブレーキ圧を増大させるブレーキ液圧指令値を出力するとともに、前輪操舵アクチュエータ5に対し、ステアリングギア比をより大きくするギア比可変指令値を出力する内輪空転防止制御手段と、を設けた。
(もっと読む)
バイラテラルサーボ制御装置
従来の力帰還型あるいは並列型バイラテラルサーボ構成に必要なマスタの位置(回転運動においては角度)センサと力(回転運動においてはトルク)センサを互いに冗長センサとして使用する。力帰還型あるいは並列型バイラテラルサーボにおいて、故障したセンサを他のセンサにより代替してスレーブの目標位置(角度)を決定することができるため、制御動作を継続することができる。また、本来はバイラテラルサーボのために備えたセンサを冗長センサの代わりに活用するので、より低いセンサの冗長度で所定の信頼度を有する制御装置が実現可能となる。 (もっと読む)
ステアリングシステム
車輌用のラックアンドピニオン式ステアリングギアはハウジング(2)と、ハウジング内で第1軸線(14)の周りに回転可能なピニオン(1)と、ハウジングに対して横変位可能なラック(7)と、ピニオン(1)とラック(7)との間に介挿され、それぞれに噛合し、第2軸線(9)の周りに回転可能な中間ギア(8)とを具える。第2軸線(9)は、作動機構によって、少なくとも1つの車輌のパラメータに応じて、ハウジングに対して横移動可能であり、これにより、その車輌のパラメータに応じて、ピニオンの角変位と、ラックの横変位との間の関係が変化する。
 (もっと読む)
(もっと読む)
転覆安定化のための方法およびビークルダイナミクス制御システム
【課題】 車両の積載状態、転覆傾向を評価し、転覆安定化アルゴリズムの枠組みで考慮できる、車両の転覆安定化のための方法およびビークルダイナミクス制御システムを提供する。
【解決手段】 車両を安定化させるために、転覆安定化アルゴリズム(4、5、8)が限界的状況でアクチュエータ(3、9、10)を用いて走行運転中に介入する、限界的走行状況の下での車両の転覆安定化のための方法において、車両重量(m)並びに特性速度(vch)とタイヤ接地荷重の比(FNl/FNr)が求められ、且つ転覆安定化アルゴリズム(4、5、8)が車両重量(m)或いは推定された車両重心(hsp)に依存して実行されることによって、車両の様々な積載状態が考慮される。
(もっと読む)
チルト調節装置及び車両のチルトを調節する方法
本発明は、車両(10)のロール角速度を示す信号(κ’)を検出すると共に、設定舵取り角信号(δLset)を検出する検出手段と、前記ロール角速度信号(κ’)及び設定舵取り角信号(δLset)に基づいて舵取り信号(δL)を発生する調節手段(21,29,30)とを備え、加えて、車両(10)の少なくとも一つの軸の一つ以上の車輪(11)の舵取りを行うために、舵取りアクチュエータ(15)に舵取り信号(δL)を出力する出力手段(31)を備える車両(10)用のチルト調節装置(16)に関する。本発明によれば、チルト調節装置(16)は、車両(10)が少なくとも一時的にシングルトラック走行モードに保持されるように、舵取り信号(δL)によって舵取りアクチュエータ(15)を制御する。 (もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 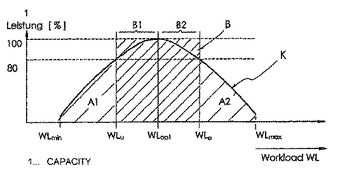 (もっと読む)
(もっと読む)
461 - 471 / 471
[ Back to top ]