
Fターム[3D232DA74]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 環境 (112) | 走行エリア(高速道路、市街地等) (37)
Fターム[3D232DA74]に分類される特許
1 - 20 / 37
車両制御装置
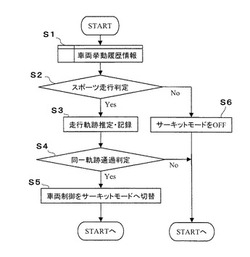
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
操舵装置

【課題】運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の環境を特定する特定手段と、特定された環境に基づいて、操舵ハンドルに発生させる操舵減衰力を制御する制御手段とを備える。ダンピング制御部130は、基本ダンピング制御部131によって設定した基本ダンピングトルクTbと、調整ゲイン設定部1341によって道幅判定値に応じて設定した調整ゲインGaとの積をダンピングトルクとして設定する。
(もっと読む)
視線技術、死角インジケータ及びドライバ経験を用いる予測ヒューマン・マシン・インタフェース
【課題】 車両における事故予防システム及び方法を改善すること。
【解決手段】 車両における事故を予防するシステム及び方法を開示する。そのシステムは、ドライバから視線ベクトルを受け取る視線検知器を備える。そのシステムは、近隣の複数の物体の位置及びそれらの速度を検出する近接センサをさらに備える。車両事故リスクを、その近隣の物体の位置及び速度に基づいて判定する。さらに、車両の周囲の状況に関するドライバの認識を、その近隣の物体の位置及び速度に加えて、視線位置にも基づいて判定する。そのドライバの認識及びその車両事故リスクに応じて、車両警報を起動する。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両の運転者を補助する運転支援の実行中に、車両の運転者が受ける違和感を低減すること。
【解決手段】運転支援装置20は、操作予測部21と、走行軌跡生成部22と、走行機能制御部23とを備える。操作予測部21は、車両の運転者が運転操作をすることを、前記運転者が前記運転操作をする前に予測する。走行軌跡生成部22は、操作予測部21によって予測された運転操作の予測結果を踏まえて、前記運転者が運転する車両が目標とする目標走行軌跡を生成する。走行機能制御部23は、走行軌跡生成部22によって生成された目標走行軌跡と運転者の実際の運転操作とを調停した結果に基づいて、車両の走行機能を制御する。
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車両の走行安全装置
【課題】自車が横風を受けるような走行状況にあるときの安全性を向上させるようにした車両の走行安全装置を提供する。
【解決手段】自車の進行方向の前方を撮像して得た画像に基づいて設定された、自車が走行すべき目標経路に沿って走行するように自車の操舵をアシストする目標経路維持走行制御を実行する走行制御部を備えた車両の走行安全装置において、自車に作用する横風の発生を推定し(S16)、横風の発生が推定される場合、目標経路維持走行制御を実行する(S22)。
(もっと読む)
アドバイス情報提示装置、及びプログラム
【課題】ドライバの理解度や上達度に応じた適切なアドバイスを提示する。
【解決手段】所定の走行路状況と所定の走行路状況におけるドライバの適切な行動との組が複数個記憶され、適切な行動の各々に対応させて、適切な行動を促すための各々詳細度が異なるアドバイス情報が記憶され、かつ表示装置14aやスピーカ14bにより提示が許可されたアドバイス情報の詳細度である提示詳細度が組毎に記憶されたHDD12bを備え、所定の走行路状況が検出された場合に、検出されたドライバの行動が、検出された走行路状況に対応する何れかのドライバの適切な行動であるときには、対応する組の提示詳細度が低くなるように変更される(ステップ126)と共に、適切な行動でないときには、対応する組の提示詳細度が高くなるように変更される(ステップ114)。
(もっと読む)
操舵制御装置
【課題】運転者の意図に合致した車線変更を行う。
【解決手段】操舵制御ECU1は、先行車両との車間距離を検出する先行車両検出部111と、検出された車間距離に基づいて先行車両との衝突を回避するために車線を変更する必要があるか否かを判定する車線変更要否判定部112と、車両の車線変更先となり得る車線があるか否かを判定する車線判定部115と、運転者の視線の向きを検出する視線検出部113と、検出された視線の向きに基づいて運転者に車線を変更する意志があるか否かを判定する意志判定部114と、車線を変更する必要があると判定され、且つ、車線変更先となり得る車線があると判定された場合には、運転者に車線を変更する意志があると判定された場合に限って、車両が走行している車線の右側又は左側の車線に変更するべく操舵を制御する車線変更実行部116と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】走行時の操舵フィーリングや安全性を損なうことなく、路面情報が加味された目
標操舵補助力を求めるためのマップへの切り替えと、路面状況にも対応した操舵補助とを
実行することができる電動パワーステアリング制御装置を提供すること。
【解決手段】ステアリング1の操舵状態に基づいて決定された目標操舵補助力に基づいて
ステアリング1の操舵補助を行う電動機の駆動を制御する制御手段と、路面情報を取得す
る路面情報取得手段22aと、自車位置情報を取得する自車位置情報取得手段22bと、
路面情報が加味された目標操舵補助力を求めるためのマップを作成するマップ作成手段2
2cと、切替タイミング設定スイッチ32の設定状態、路面情報取得手段22aにより取
得した路面情報、及び自車位置情報取得手段22bにより取得した自車位置情報に基づい
て、作成されたマップへの切り替え処理を行うマップ切替手段22dとを装備する。
(もっと読む)
駐車支援装置
【課題】目標駐車枠を簡易迅速に移動または回転させる駐車支援装置を提供することを目的とする。
【解決手段】駐車支援装置10は、車両周辺を映し出した実画像上に表示される目標駐車枠Sの位置に従って車両を駐車すべき目標駐車位置を設定する目標駐車位置設定手段を備え、該目標駐車位置設定手段により設定された前記目標駐車位置への誘導案内を行う。駐車位置設定手段は、タッチディスプレイ上で直接タッチ操作された座標点に目標駐車位置を設定可能であり、かつ、その座標点を目標駐車枠Sの回転中心とする。
(もっと読む)
車輌の走行制御装置
【課題】乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御する。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
(もっと読む)
車両の自動運転装置
【課題】 設備の簡素化を図りつつ、自動運転から手動運転への移行をスムーズに行うことができる車両の自動運転装置を提供する。
【解決手段】 自動運転装置1の自動運転ECU2は、地図データベース16に格納されている道路地図情報を用いて、目的地までの全ルートのうち走行すべき高速道路区間を設定する高速道経路設定部10と、高速道路区間における出口ICの一つ手前のPA(最終PA)を退避エリアとして設定する退避エリア設定部11と、高速道路区間における最終PAの手前の地点を、自動運転から手動運転への引き継ぎを開始するための引継地点として設定する自動運転引継地点設定部12と、自動運転スイッチ5がオンに切り換えられると、退避エリアを目的地として自動運転を行うように制御する自動運転動作制御部15とを有している。
(もっと読む)
横風警告装置、横風警告装置を搭載した自動車、および横風警告方法
【課題】自車が将来訪れる領域における横風を検知し、運転者に事前に横風の警告を行う。
【解決手段】自車室外の音を集音する集音手段と、集音部で集音した音から自車周辺領域の横風を推定する自車周辺領域横風推定手段と、自車周辺の車室外を撮影する車室外撮影手段と、車室外撮影手段で取得した画像から進路前方領域で風揺れしている物体を検出する進路前方領域風揺れ物体検出手段と、進路前方領域風揺れ物体検出手段で検出した風揺れ物体の風揺れ状態から進路前方領域内に発生している横風を推定する進路前方領域横風推定手段と、自車周辺領域横風推定手段と前記進路前方領域横風推定手段で推定した横風の風力もしくは風速のいずれかの差分を算出し、自車の現在地と比較して進路前方領域内で横風が一定以上強い場合に横風を警告すると判定する横風警告判定手段を設けた。
(もっと読む)
車両の走行安全装置
【課題】物体との接触の可能性があると判断される場合、操舵トルクを付与する接触回避支援制御を行うと共に、その制御量を推定されるドライバの操舵特性に応じて補正するようにした車両の走行安全装置を提供する。
【解決手段】検出された物体との接触の可能性を判断する接触可能性判断手段(S14)と、検出された物体との接触の可能性があると判断される場合、操舵トルクを付与して接触回避を支援する接触回避支援制御を実行する接触回避支援制御実行手段とを備えた(S16からS38)車両の走行安全装置において、接触回避支援制御の制御量を算出し(S32)、算出された制御量を、推定されるドライバの操舵特性に基づいて補正し(S34)、補正された制御量に基づいて接触回避支援制御を実行する(S36)。
(もっと読む)
操舵制御装置
【課題】運転者による操舵を補助するにあたり、運転者に与える違和感を低減すること。
【解決手段】操舵制御装置20は、目標軌跡設定部21と、操舵特性設定部22とを含んでいる。目標軌跡設定部21は、車両の進行方向に存在する回避対象物に関する情報と、車両の運転者の顔向き又は視線の少なくとも一方とに基づいて、車両の目標とする進行軌跡を設定する。操舵特性設定部22は、目標軌跡設定部21が設定した車両の目標とする進行軌跡に基づいて、車両の操舵特性を設定する。
(もっと読む)
疲労度検出装置,自動車の制御装置および制御方法
【課題】
運転者の疲労度をより高い精度で検知する。
【解決手段】
運転者による所定の操作デバイスの操作状態に関わる信号を入力し、当該信号に基づいて運転操作量を演算する実操作量演算部114と、車両の進行経路の道路形状に基づいて基準操作量を演算する基準操作量演算部111と、運転操作量と基準操作量とに基づき運転者の疲労度を求める疲労度演算部117とを有する。実操作量演算部114は、運転者による操舵装置やペダルの操作状態に関わる信号を入力し、基準操作量演算部111は、ナビゲーション装置のデータによって基準操作量を演算する。
(もっと読む)
車両制御装置
【課題】運転者に車両の運転が困難な緊急異常状態が発生した場合においても、自車両を安全に停車させることが可能となるように制御する車両制御装置を提供する。
【解決手段】CPU41は、スピーカ16を介して呼びかけを行っても、マイク18を介して運転者の応答が無い場合には、運転者の意識が無いと判定する(S1〜S2:YES)。そして、CPU41は、地図情報DB25に格納されるナビ地図情報と自車位置データから、車両2が一番左側の車線を走行している場合には(S5:YES)、車両ECU71を介してブレーキランプや左側方向指示器のランプ類を点滅点灯する等して、周囲の他車両に対して、車両2に緊急異常状態が発生して緊急停車する旨をアピールしながら、車両ECU71を介してブレーキ73、エンジン74、変速機75やステアリング駆動部76を駆動制御して当該車両2を道路の左側端縁に緊急停車させる(S6〜S8)。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】自車両に起因する様々なリスクを区別して運転者に分かりやく伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両を要因とする複数の異なるリスクについてリスクポテンシャルをそれぞれ算出する。自車両の運動エネルギに起因するリスクポテンシャルは、リスクポテンシャルが増大するに従って徐々に増加する反力をアクセルペダルから発生させることによって、運転者に伝達する。自車両の走行規則に起因するリスクポテンシャルは、そのリスクが発生したときに不連続に変化する付加反力をアクセルペダルに付加することによって運転者に伝達する。
(もっと読む)
1 - 20 / 37
[ Back to top ]