
Fターム[3D232DA87]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車外からの情報 (852) | GPS (411)
Fターム[3D232DA87]に分類される特許
401 - 411 / 411
電動パワーステアリング装置

【課題】 ステアリング機構を構成する部品の特性のばらつき等が存在しても、良好な操舵フィーリングと高い操安性能を得ることができる電動パワーステアリング装置を提供する。
【解決手段】 本発明の電動パワーステアリング装置は、舵角センサを有することなく、ドライバがハンドルを切り戻した領域を電動モータの回転方向から推定する操舵領域推定手段と、この操舵領域における電動モータの回転角度に対するトルクセンサ値と予め記憶された電動モータの回転角度に対する目標トルクセンサ値との偏差を算出する偏差算出手段と、この偏差が所定値以上の場合、制御マップを補正する補正手段と、を有する。
(もっと読む)
車両制御装置

【課題】車両挙動の変化に対して良好な応答性で車両制御を行うことができる車両制御装置を提供する。
【解決手段】制御装置14において、歪量センサS13によって検出されるショックアブソーバ23の歪量μに基づいて、車輪5のタイヤWに作用するコーナリングフォースCfが求められる。そして、その求められたコーナリングフォースCfに基づいて、ステアリングホイール1に操作反力を与えるための反力制御や、ステアリングホイール1の回転量と車輪5の転舵量との比を可変設定するVGR制御が行われる。
(もっと読む)
無人運転走行車両
【課題】任意の位置から自動走行開始位置へ自動で移動可能である。
【解決手段】測位システムを備え、運転者が乗車しないで自動走行する無人運転が可能な車両であり、自動走行コースの自動走行開始位置を設定する自動走行開始位置設定手段900と、自動走行開始位置を基点とする所定範囲を演算する所定範囲演算手段901と、現在の車両位置から走行開始位置までの走行経路を演算する走行経路演算手段902と、現在の車両位置が所定範囲内か否かを判断する判断手段903とを備える。
(もっと読む)
駐車支援システム
【課題】 運転手が自車両を駐車させる場合の操作性を高めると共に、運転を適切に支援する。
【解決手段】 駐車支援ECU2は、自車両が後退中にあるときに操舵を反転して操舵角を最大にした場合の自車両の予測進路を算出し、その算出された予測進路上にあって自車両の方向が駐車スペースの方向に対して略平行となる操舵反転目安位置を表すマーカを鳥瞰画像上に重畳して表示する。マーカと駐車スペースとの相対的な位置関係から操舵を反転して操舵角を最大にすべきタイミングを運転手に認識させることが可能となる。
(もっと読む)
ステアリング装置を備える車両
【課題】ステアリング軸を分割して構成する簡単な構造で、かつ低コストで操向輪を左右に旋回することが可能である。
【解決手段】操向ハンドルと、この操向ハンドルの操作により操向輪を左右に旋回するステアリング軸とを有するステアリング装置を備える車両であり、ステアリング軸を上下に分割し、分割した上側分割ステアリング軸の旋回に基づき車両直進位置から右方向または左方向へのハンドル切り角を検出するハンドル切り角検出手段と、検出したハンドル切り角情報に基づき前記分割した下側分割ステアリング軸を旋回するステアリング軸駆動手段と、上側分割ステアリング軸の旋回力に対して反力を与え、旋回力の解除で初期位置へ戻る反力機構とを備える。
(もっと読む)
車両のレーン走行支援装置
【課題】 ナビゲーション装置の検出情報に基づき車両進行方向の道路曲率を演算すると共に、走行レーン検出手段の検出情報等に基づき道路曲率を演算し、これらを照合して推定した道路曲率に基づき車両のレーン走行支援を行う安価な装置を提供する。
【解決手段】 操舵制御手段(電動パワーステアリングシステム)と、走行レーン検出手段(カメラ等)を備え、その検出結果と車両の操舵状態及び走行状態に応じて、修正操舵を行ない車両の走行レーン内の走行を支援する。特に、車両状態量演算手段の演算結果及び状態検出手段の検出結果に基づいて演算した第1の道路曲率と、ナビゲーション装置NAVが検出した車両の進行方向の所定距離分の位置座標に基づいて演算した第2の道路曲率に基づき、車両進行方向の道路曲率を推定し、この道路曲率並びに車両の操舵状態及び走行状態に基づき目標状態量を設定する。
(もっと読む)
操舵トルクを決定する方法
本発明は、自動車のハンドル用の操舵トルクを決定することを可能にする方法に関する。かじ取り角が、操舵された車輪について、ハンドルを用いて運転者によって予め規定される。車軸に対する力を表す操舵トルクが、ハンドルに作用する。本発明によれば、手動トルク(M_soll)が、少なくとも1つの軸モデルを用いて決定される。次いで、手動トルクは、操舵トルク(M_ist)に重ね合わされる。  (もっと読む)
(もっと読む)
車両用操舵システム
【課題】路面状態に基づき操舵比を変更する。
【解決手段】自動車用操舵システム10が、操舵角20を規定する操舵輪、操舵角20を制御するパワー・アクチュエーター14及び、ドライバー入力制御角度を提供するステアリング・ホイール16、を有する。ドライバー入力制御角度の操舵角20に対する比が、操舵比を規定する。操舵システム10はまた、路面状態に少なくとも部分的に基づき、操舵比を選択的に変更する制御器18を含む。
(もっと読む)
車輪の個々のブレーキング制御装置の支援による、4輪操舵装置を有する自動車の制御方法
本発明は、4輪操舵装置を有する自動車の制御方法に関する。本発明の自動車の制御方法においては、自動車の軌跡が所定の閾値を越えて逸脱したことが検出されたときには、前輪に対する第1のブレーキングトルク(Cmodel)の発生が指令され、自動車の軌跡が所定の閾値を越えて逸脱したことと、後輪の操向装置が故障していることとが検出されたときには、前輪に対する、第1のブレーキングトルク(Cmodel)とは異なる、第2のブレーキングトルク(Cesp)の発生が指令される。 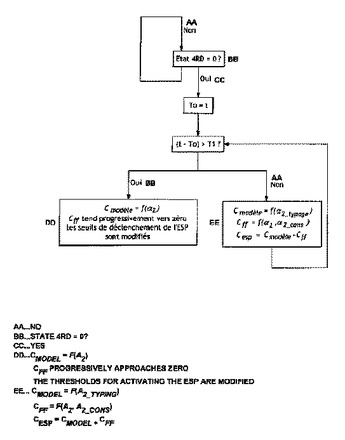 (もっと読む)
(もっと読む)
自動車を支援して車庫入れさせるための方法および装置
自動車(1)を駐車余地に支援しながら車庫入れさせるための方法および装置が提案される。この方法は次のステップを有している:
− 駐車余地に向かって走り、
− 自動車(1)に配置されているセンサ(16)を用いて駐車余地(20)を測量し、
− 目標車庫入れパスを計算しかつ該目標車庫入れパスをディスプレイ(15)に指示し、
− 実際車庫入れパスをディスプレイ(15)に指示して、該実際車庫入れパスが目標車庫入れパスに整合できるようにする。  (もっと読む)
(もっと読む)
運転者の行動解釈に基づいて自動車のサブシステムを制御する方法および機構
本発明は、自動車の運転のためのタスクに対する運転者の不注意レベルの検出に依存する、自動車のサブシステムを制御するシステムおよび方法に関する。可変特性は、運転者の不注意と相関し、実質的に実時間に基づいて、測定される。不注意のレベルは、少なくとも部分的に、測定に基づいて評価される。クルーズコントロールや車線維持支援のような自動車のサブシステムの動作は、それに基づいて、前記自動車の動作が運転者の現在の不注意レベルに適切に合致することを保証するように、調整される。前記サブシステムの動作は、運転者の不注意レベルが増加すると本質的に危険性を増す走行条件が確立されることを防ぎまたは回避するように制御される。 (もっと読む)
401 - 411 / 411
[ Back to top ]