
Fターム[3D232DB01]の内容
走行状態に応じる操向制御 (73,124) | 制御時期 (1,133) | 定速走行時 (66)
Fターム[3D232DB01]に分類される特許
1 - 20 / 66
障害物検出装置及び車両制御装置
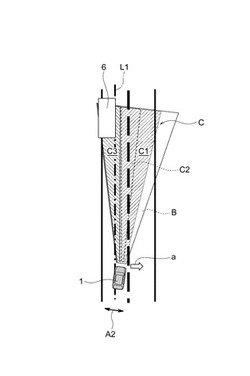
【課題】障害物の検出精度を向上させることが可能な障害物検出装置を提供する。
【解決手段】障害物検出装置100は、障害物6を検出する検出領域Cを、車両1の進行方向A1に設定する検出領域設定部53と、検出領域C内に位置する障害物6を検出する情報取得装置3及び判断部55と、車両1における操舵操作の操舵方向aを検出する操舵方向検出装置4と、を備え、検出領域設定部53は、検出領域Cにおいて、操舵方向aに対して反対方向に位置する反対部分C2を、車幅方向外側に向って拡大する。
(もっと読む)
電動パワーステアリング装置用負荷低減装置

【課題】低速時、あるいは停止した状態での据え切りなどの操舵時のパワーステアリングモータの負荷を軽減し、前記パワーステアリングモータの小容量化を実現する。
【解決手段】車両の速度が一定の速度以下の低速走行時あるいはほとんど停止した状態での据え切りなどの操舵時において、ステアリングホイール8の操作によるトルクセンサ値が±Viniにより規定される不感帯の範囲を超えると、前記トルクセンサ値に応じた左前輪1のインホイールモータ2の左前輪目標モータトルク指示値と右前輪3のインホイールモータ4の右前輪目標モータトルク指示値が算出される。そして、左前輪1が前記左前輪目標モータトルク指示値をもとにインホイールモータ2により、また、右前輪3が前記右前輪目標モータトルク指示値をもとにインホイールモータ4により、それぞれパワーステアリングモータ5の操舵アシスト負荷が減少する方向へ回転制御される。
(もっと読む)
視線技術、死角インジケータ及びドライバ経験を用いる予測ヒューマン・マシン・インタフェース
【課題】 車両における事故予防システム及び方法を改善すること。
【解決手段】 車両における事故を予防するシステム及び方法を開示する。そのシステムは、ドライバから視線ベクトルを受け取る視線検知器を備える。そのシステムは、近隣の複数の物体の位置及びそれらの速度を検出する近接センサをさらに備える。車両事故リスクを、その近隣の物体の位置及び速度に基づいて判定する。さらに、車両の周囲の状況に関するドライバの認識を、その近隣の物体の位置及び速度に加えて、視線位置にも基づいて判定する。そのドライバの認識及びその車両事故リスクに応じて、車両警報を起動する。
(もっと読む)
車両の後輪操舵制御装置
【課題】 旋回走行時の加減速に起因する旋回特性の変化を適切に抑制することができる車両の後輪操舵制御装置を提供する。
【解決手段】 自動車100の後輪3rl,3rrを転舵する後輪操舵アクチュエータ8l,8rを備えた車両の後輪操舵制御装置5であって、少なくとも前輪舵角δf(目標前輪舵角δft)、車速Vおよび前後加速度Gxを含む車両の運動状態量を検出する運動状態量検出手段(操舵角センサ12,車速センサ21,前後加速度センサ22)と、少なくとも前輪舵角δfおよび車速Vから、車両モデルに基づいて目標旋回挙動を設定し、当該目標旋回挙動に基づいて目標後輪舵角δrを設定する目標後輪舵角設定部32とを有し、前記車両モデルは、車両のスタビリティファクタAに基づいて設定され、スタビリティファクタAは、車速Vおよび前後加速度Gxに基づいて補正されることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルクが非操舵相当の所定範囲内にあるときも、制御装置で減速機構の駆動ギヤ5aに回転トルクを与える。すなわち、従動ギヤ5bを駆動するには不十分な微小な回転トルクをモータに生じさせることにより、駆動ギヤ5a及び従動ギヤ5b間で一方向へのバックラッシュBLがない状態とし、かつ、所定時間の経過等の所定の条件で回転トルクの方向を反転させ他方向へのバックラッシュBLがない状態に切り替える。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】不感帯域マップが基本アシスト特性から右アシスト方向にオフセットしたアシスト特性、及び、左アシスト方向にオフセットしたアシスト特性を併有するECUにより、モータに微小な回転トルクを生じさせ、駆動ギヤ及び従動ギヤ間でバックラッシュがない状態とする。この状態では、路面から逆入力があっても、両ギヤは互いに当接した状態を維持することができるので、ラトル音の発生を抑制することができる。また、ECUは、左右いずれか一方の操舵トルクの絶対値が増大して所定値(T0,T3の絶対値)より大きくなった後、当該所定値より小さい状態に戻るときは、アシスト方向が反転する方のアシスト特性を選択することにより、違和感の無い滑らかな操舵感を実現する。
(もっと読む)
電動パワーステアリング装置
【課題】 車速センサフェール時においても、車速に応じた良好な操舵アシストトルクが得られるようにする。
【解決手段】 操舵角θに対するヨーレートγの大きさを表すヨーゲインGと車速との関係を表すヨーゲインマップを予め記憶しておく。車速センサフェール時においては、ヨーレートγと操舵角θとを検出し、ヨーゲインマップを参照して推定車速Vsを算出する。この推定車速Vsに対して徐変処理を行って、最終的な補正推定車速Vsxを算出する。車速センサにより検出される車速Vに代えて補正推定車速Vsxを用いてアシストトルクマップを参照することにより、目標アシストトルクを設定する。これにより、良好な操舵アシストトルクが得られる。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】片流れ抑制制御に用いる入力値の異常を検知して、片流れの抑制を適正に行うことができる車両用操舵制御装置及び車両用操舵制御方法を提供する。
【解決手段】トルクセンサ11で検出した操舵トルクT、及びヨーレートセンサ15で検出したヨーレートYに基づいて、車両の片流れを抑制する片流れ抑制制御を行う。このとき、操舵トルク検出値T、ヨーレート検出値Y及び片流れ抑制制御の電流指令値Ibの推移に基づいて、操舵トルク検出値T及びヨーレート検出値Yの異常(誤差が含まれているか否か)を検知する。そして、異常が発生している場合には、その検出値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】カント路を直進走行しているときの操舵フィールをより良好にする。
【解決手段】少なくとも操舵トルクに応じてアシストモータ31による操舵アシスト量を制御する電動パワーステアリング装置1において、操舵トルクを検出する操舵トルクセンサ7と、車両が直進走行中か否かを判定する直進クルーズ走行判定部14と、操舵アシスト量を補正する補正量算出部16と、を備え、補正量算出部16は、直進クルーズ走行判定部14により直進走行中であると判定されている場合に、操舵トルクセンサ7で検出される操舵トルクが予め設定された目標操舵トルク以下になるように操舵アシスト量を補正する。
(もっと読む)
車線逸脱防止装置
【課題】自車両前方に障害物が存在する場合に適切なタイミングで制御の状態を変化させる車線逸脱防止装置を提供する。
【解決手段】自車両OVの走行車線からの逸脱を防止するよう操舵トルクを発生する車線逸脱防止装置を、自車両の進行路を推定する自車進行路推定手段140と、自車両前方の障害物Fを認識する障害物認識手段130と、自車両と障害物との横方向における重なり度合をラップ量として演算するラップ量演算手段150と、障害物の自車両への接近状況に応じて走行車線中央側へ向かう操舵トルクを低下させる逸脱防止制御低下手段160と、ラップ量の増大に応じて逸脱防止制御低下手段が操舵トルクを低下させるタイミングを早くするタイミング変更手段を備える構成とする。
(もっと読む)
車両の操舵装置
【課題】 前輪および後輪が転舵可能な車両において発生する操舵ハンドルの中立操作位置のずれを補正する車両の操舵装置を提供すること。
【解決手段】 電子制御ユニット26は、車速Vが所定の車速Vo以上のときに、操舵トルクTが所定の操舵トルクTo以下であり、かつ、操舵角θの変化量Δθが所定の操舵角θo以下となる状態で所定の時間to以上継続すれば、車両が直進走行していると判定する。また、車両が直進走行している状態で操舵ハンドル11の操舵角θが中立操作位置を表す「0」でなければ、操舵角θと前輪側転舵機構13におけるギア比とを用いて左右前輪FW1,FW2の転舵量と一致する左右後輪RW1,RW2の転舵量(転舵角)Sを算出する。そして、転舵量Sに対応する後輪RW1,RW2の制御中立転舵位置が絶対中立転舵位置となるまで電動モータ14を駆動制御して後輪RW1,RW2を転舵する。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
油圧パワーステアリング
【課題】スネーキング現象の振動モードに陥ることを抑制する油圧パワーステアリングを提供する。
【解決手段】2つのシリンダ室23b、23cを有し、車両の前輪を操舵するハンドルの操舵力を補助する油圧シリンダ23と、2つシリンダ室23b、23cへのオイルの供給、排出を制御するロータリバルブ27とを有し、シリンダ室23bとロータリバルブ27との間を接続する配管Lに、通過するオイルの流量を制限可能な流量可変バルブ24を設け、車両が被牽引車を牽引しているときには、流量可変バルブ24を通過するオイルの流量を調整し、油圧シリンダ23の動きを抑制している。
(もっと読む)
車輌用操舵装置
【課題】運転者により操舵部材が保舵状態とされた場合に、保舵状態に適した操舵補助力を応答性よく発生することができる車輌用操舵装置を提供する。
【解決手段】制御部30は、転舵角センサ6が検出する転舵角及び車速センサ32が検出する車速から推定される車輌の横すべり角と視線角検出手段31が検出する運転者の視線角との角度差に基づいて、操舵補助力を調整する。横すべり角及び視線角の角度差が小さい場合、即ち保舵状態又は保舵状態に近い状態においては、モータ4が発生する操舵補助力を増加させるように制御部30が操舵補助力の調整を行う。ステアリングホイール1の操舵角が中立位置を含む所定範囲内の場合には、制御部30は操舵補助力の調整を行わない。運転者の視線角が変化した時の変化量又は変化の加速度が所定量を超えた場合には、この変化に基づく操舵補助力の調整を行わずに、変化前の操舵補助力の調整結果を維持して行う。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置の初期診断において、危険を伴わない車両挙動による特殊要因によって、若しくは一時的に異常検出条件に適合することによって異常と判定され、アシスト制御を停止した場合でも、電動パワーステアリング装置が安全であることの確認ができた場合には、走行中でもアシスト制御を復帰させるようにした電動パワーステアリング装置を提供する。
【解決手段】車両の操舵系にモータのアシストトルクを付与してアシスト制御を行うようになっている電動パワーステアリング装置において、異常有無を検出する初期診断で異常が検出されたときにアシスト制御を停止すると共に、初期診断を繰り返して行い、異常が検出されなくなったときにアシスト制御を復帰させる機能を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】スタータースイッチがオンにされたときに、無用な電流の制限を抑止することで、操舵部材の操舵感が悪化しないようにすることができる電動パワーステアリング装置を提供する。
【解決手段】操舵補助用のモータが駆動されることにより昇温するアシスト制御部6の温度が許容温度を超えた場合に、電流制限値以下に、モータに供給するモータ電流を制御する電動パワーステアリング装置において、記憶部67に、エンジンが停止されたときに温度検出部64が検出したアシスト制御部6の温度Toffと、エンジンが停止されたときの電流制限値Ioffとを記憶する。スタータースイッチがオンされたときに温度検出部64が検出した温度、及び記憶部67に記憶された温度Toffの温度差Taを演算する。スタータースイッチがオンされてから所定時間に亘って、演算された温度差Taに応じて、電流制限値を、記憶部67に記憶された電流制限値Ioff以上に設定する。
(もっと読む)
制御干渉候補検出装置及び制御干渉候補検出方法
【課題】 統合制御システム全体の中から、不整合を引き起こす制御の組合せを検出することができ、問題のある箇所の発見を効率よく行なうことができると共に、設計者による検出漏れを防止することができる制御干渉候補検出装置及び制御干渉候補検出方法を提供する。
【解決手段】 制御干渉候補検出装置10は、複数の制御部を統合的に実行する統合制御システムのうち、一の信号が並列に複数の制御部にそれぞれ入力される段を検出する複数入力段検出手段5と、統合制御システムのうち複数の制御部から出力される信号が単一の制御部に入力される段を検出する単一出力段検出手段4と、前記一の信号による前記単一の制御部までの経路を干渉候補として検出する干渉候補検出手段6とを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】接点の良好な接触状態を損なうことなく、リレーの電力消費を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】モータ4に電力を供給する電路にリレー9の接点9cを介挿した電動パワーステアリング装置において、FET12等のスイッチング素子を用いてリレーコイル9sを励磁する。制御部1(リレー制御部1R)は、FET12をパルス幅変調信号により駆動するとともに、リレー9の動作時における接点9cの負荷側の電圧を検知することによって当該接点9cのバウンス時間を求め、このバウンス時間に応じてパルス幅変調信号のデューティを変化させる。
(もっと読む)
電動パワーステアリング装置
【課題】車両のステア状態が、少なくともオーバーステアであるときに、操舵の切増し抑制すると共に、カウンターステア操舵を容易にし、車両挙動の安定性を向上させる。
【解決手段】タイヤのグリップが失われた度合を表すグリップロス度をグリップロス度検出手段23で検出すると共に、車両のステア状態をステア状態検出部24で検出し、車両のヨーレートをヨーレート検出手段42で検出し、さらに電動モータ12のモータ角速度を角速度演算部で検出し、検出したヨーレート、モータ角速度、ステア状態及びグリップロス度に基づいて補償値補正手段25で操舵補助電流指令値に対するトルク微分補償値を補正する。
(もっと読む)
1 - 20 / 66
[ Back to top ]