
Fターム[3D232DB10]の内容
走行状態に応じる操向制御 (73,124) | 制御時期 (1,133) | 減速時 (70)
Fターム[3D232DB10]に分類される特許
1 - 20 / 70
後輪トー角制御装置
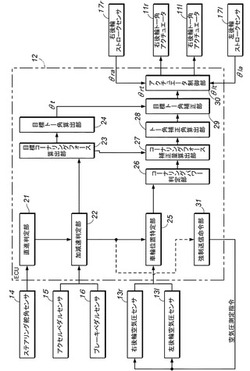
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
電動車両の制御装置

【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
電動パワーステアリング装置
【課題】別途センサを設けることなく、前輪軸に掛かる負荷の変化を検出して操舵系に与える操舵補助力を適正に補正する。
【解決手段】操舵系の操舵トルクを検出する操舵トルク検出部3と、操舵系に対して操舵補助力を発生する電動モータ12と、少なくとも操舵トルクに基づいて操舵補助指令値を算出する操舵補助指令値制御部21と、操舵補助電流指令値に基づいて前記電動モータを駆動制御するモータ制御部30と、操舵系の操舵角を検出する操舵角検出部13と、電動モータ12のモータ電流を検出するモータ電流検出部31と、操舵角とモータ電流との対応関係を表す基準操舵特性を記憶する基準特性記憶部23と、検出したモータ電流と操舵角とをもとに前記基準操舵特性を参照して前輪軸負荷を推定する軸負荷推定部22と、該軸負荷推定部22で推定した前輪軸負荷に基づいて前記操舵補助指令値を補正する指令値補正部24とを備えている。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両の後輪操舵制御装置
【課題】 旋回走行時の加減速に起因する旋回特性の変化を適切に抑制することができる車両の後輪操舵制御装置を提供する。
【解決手段】 自動車100の後輪3rl,3rrを転舵する後輪操舵アクチュエータ8l,8rを備えた車両の後輪操舵制御装置5であって、少なくとも前輪舵角δf(目標前輪舵角δft)、車速Vおよび前後加速度Gxを含む車両の運動状態量を検出する運動状態量検出手段(操舵角センサ12,車速センサ21,前後加速度センサ22)と、少なくとも前輪舵角δfおよび車速Vから、車両モデルに基づいて目標旋回挙動を設定し、当該目標旋回挙動に基づいて目標後輪舵角δrを設定する目標後輪舵角設定部32とを有し、前記車両モデルは、車両のスタビリティファクタAに基づいて設定され、スタビリティファクタAは、車速Vおよび前後加速度Gxに基づいて補正されることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
車両の後輪トー角制御装置
【課題】舵角センサ等のセンサが失陥した場合の後輪トー角制御装置のフェールセーフアクションが、車両挙動を乱すことも、運転者に違和感を与えることもなく適切に行われるようにすること。
【解決手段】車両が旋回している状態では、後輪トー角を中立に戻すフェールセーフアクションを行わず、車両が直進走行している場合に限って後輪トー角を中立に戻すフェールセーフアクションを行う。
(もっと読む)
パワーステアリング装置
【課題】車両の加速度に依存する操舵フィーリングの悪化の問題を改善する。
【解決手段】操舵補助力を発生用の油圧ポンプを駆動するための電動モータ24を、ECU25がPWM制御する。ECU25は、目標回転速度設定部36が設定する目標回転速度ω*に応じて、電動モータ24を制御する。目標回転速度設定部36は、基本目標回転速度設定部41、ゲイン設定部42および乗算器43を備えている。基本目標回転速度設定部41は、操舵速度および車速に応じて基本目標回転速度を設定する。ゲイン設定部42は、車両の加速度に応じたゲインを設定する。乗算器43は、ゲイン設定部42によって設定されたゲインを基本目標回転速度に乗じて、最終的な目標回転速度ω*を求める。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】補助舵角演算部9が、左右の車輪間の制動力の差によって車両にヨーモーメントが発生する場合、車両に当該ヨーモーメントを打ち消す制御ヨーモーメントを発生させるために必要な操向輪の転舵角である補助舵角δ*を算出する。そして、ヨーモーメント変化速度演算部10および補助舵角補正演算部11が、その算出した補助舵角δ*を補正し、補正補助舵角δ*'として出力する。その際、ヨーモーメント変化速度dMG/dtの絶対値が大きい場合には、ヨーモーメント変化速度dMG/dtの絶対値が小さい場合に比べて、補助舵角δ*の補正量である補助舵角補正量δ'の絶対値を大きくする。
(もっと読む)
電動パワーステアリング装置
【課題】加速時および減速時にもステアリングホイールを中立位置に戻り易くする。
【解決手段】操舵角センサ6により操舵角を検出し、ステアリングホイールをアシストモータ9を介して中立位置に戻すように制御するハンドル戻し制御部13を備える電動パワーステアリング装置1において、ハンドル戻し制御部13は、車両の加速度が大きいほどステアリングホイールを中立位置に戻す制御量を増大させ、車両の減速度が大きいほどステアリングホイールを中立位置に戻す制御量を増大させる。
(もっと読む)
車両の電源装置
【課題】 主電源100を補助する副電源50を車両の走行状態に応じて効果的に充電する。
【解決手段】 主電源100とモータ駆動回路30との間に蓄電装置である副電源50を並列に接続する。電源制御部62は、副電源50の実充電容量が目標充電容量となるように昇圧回路40の昇圧電圧を制御する。この目標充電容量は、車両の減速度が大きくなるにしたがって増加するように設定される。車両が減速しているときには、車両の運動エネルギーがブレーキによって消費されている。従って、この余剰となった運動エネルギーを積極的に回収し、副電源50の充電に利用することができる。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置21を備え、後輪5のトー角θRTCが可変制御される後輪トー角可変式の自動車Vに設けられ、後輪5のトー角θRTCの制御に供される後輪トー角制御装置11において、ヨーレートγを検出するヨーレートセンサ9と、横加速度αyを検出する横加速度センサ10とを備え、検出されたヨーレートγと横加速度αyとに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角θRTCをトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角θRTCをトーアウト側に設定する。
(もっと読む)
後輪トー角可変車両
【課題】後輪トー角可変車両において、左右の後輪トー角可変制御装置の一方が故障した場合の操縦安定性の悪化を抑制する。
【解決手段】左右後輪5L,5Rに対してそれぞれ設けられ、後輪5のトー角を可変制御する後輪トー角可変制御装置10L,10Rを備えた自動車Vにおいて、左右後輪5に対してそれぞれ設けられ、対応する後輪5のトー角θを検出するストロークセンサ16L,16Rと、許容できる車速の上限値を最高車速Vmaxとして設定する最高車速設定部53を備え、最高車速設定部53は、少なくとも一方の後輪5がトーアウト状態で制御不能となった場合、後輪5のトーアウト量が大きいほど最高車速Vmaxを低く設定し、ストロークセンサ16が故障した場合、最高車速Vmaxを最大トーアウト量に対応する最高車速Vmaxと同一の値に設定するように構成する。
(もっと読む)
後輪転舵制御装置の異常監視装置
【課題】後輪転舵制御装置の異常監視を、後輪転舵制御に影響を与えることなく、後輪転舵の制御性能を低下させることなく適切に行うこと。
【解決手段】正常制御下での後輪転舵の最大転舵角を設定し、後輪転舵の制御目標値が前記最大転舵角を超えたか否か、あるいは後輪転舵角の計測値が前記最大転舵角を超えたか否かの少なくとも何れか一方を監視し、前記制御目標値あるいは前記転舵角が前記最大転舵角を超えた場合には制御系異常である判定を出力する。
(もっと読む)
車両
【課題】キャンバー角変更手段によりタイヤのキャンバー角を変更して、異なる特性のトレッド面を使い分ける構成において、キャンバー角変更手段がタイヤのキャンバー角を変更不能となった場合でも、タイヤのグリップ力を確保することができる車両を提供すること。
【解決手段】タイヤの空気室を第1トレッド21側の第1室61と第2トレッド22側の第2室とに仕切り、これら第1室及び第2室を外部に連通させる通路をバルブによりそれぞれ開閉可能に構成したので、タイヤのキャンバー角が制御不能となった場合でも、バルブを作動させて、一方の通路を開放させることで、例えば、第2室の圧力を低下させることができる。その結果、第1トレッド21(高グリップの特性を有するトレッド)の接地を多くして、タイヤのグリップ力を確保することができる。
(もっと読む)
車両の後輪トー角制御装置
【課題】車両の実際の特性変化に適応した車両モデルに基づいて後輪トー角制御を行うことができるようにする。
【解決手段】車両のヨーレート特性に関する車両モデルに基づいて後輪トー角を制御する後輪トー角制御装置において、現在採用している車両モデルによるヨーレートと実際に車両に生じた実ヨーレートとの比較により別の車両モデルへの移行が必要か否かを判定し、移行が必要と判定されると、パラメータ値が互いに異なる複数の車両モデルの候補ごとの推定ヨーレートと実ヨーレートとの比較により最適な特性を有する車両モデルを選択して、この新たな車両モデルに基づいて制御を行うようにする。
(もっと読む)
トー角可変制御装置
【課題】高い操安性能と快適な乗り心地とを両立させることが可能なトー角可変制御装置を提供する。
【解決手段】トー角を変化させるアクチュエータ10L、10Rを左右の後輪5L、5Rにそれぞれ備えた自動車Vのトー角可変制御装置11であって、自動車Vの走行状態に応じて決定された目標トー角にトー角が設定されるように、アクチュエータ10L、10Rを作動させる第1の制御と、アクチュエータ10L、10Rに、走行中に生じたアクチュエータ10L、10Rのストローク量とストローク速度に応じて、ストロークの方向とは反対方向の力を発生させる第2の制御とを選択可能とした。
(もっと読む)
後輪独立操舵制御装置
【課題】 アクチュエータやセンサの故障が生じた場合でも、タイヤの偏磨耗の原因が生じたり、車両の安定な操縦性を損ねることのないように構成された後輪独立操舵制御装置を提供する。
【解決手段】 一方の後輪のアクチュエータ或いはセンサの故障が検出された場合、他方の後輪を適切に転舵し、確実なフェールセーフ対応或いはトー角制御のメリットの継続的な活用を可能にする。
(もっと読む)
車両制御装置、及び車両操舵装置
【課題】制動偏向を低減し、制動時における車両安定性を向上させることが可能な車両制御装置を提供すること。
【解決手段】直進制動状態である場合に、操舵装置のピニオン半径Rを大きく変更する構成とし、直進制動時にピニオン半径Rを通常時より大きく変更することで、ステアリング剛性を低下させ、転舵輪の有効半径を減少させる。これにより、フロントタイヤ(転舵輪)のCP増幅率を低下させて、制動偏向を低減し、制動時における車両安定性を向上させる。
(もっと読む)
1 - 20 / 70
[ Back to top ]