
Fターム[3D232DC12]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | フィルタ (501) | ローパスフィルタ (255)
Fターム[3D232DC12]に分類される特許
1 - 20 / 255
電動パワーステアリング装置
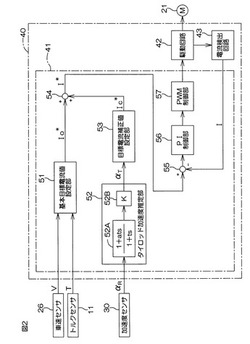
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
電動機の制御装置

【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】トルクセンサから検出された操舵トルクτの形状を生成する操舵トルク波形形状補正手段(32)によって、操舵トルクτの波形形状を運転状態に最適な波形形状の補正操舵トルクTcに補正する。そして、その補正操舵トルクTcと、操舵トルクτの乗算により算出されたリードプル補正量Iip*の値により、アシスト力を増減する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
電動パワーステアリング制御装置
【課題】自然なフィーリングを実現することが容易な電動パワーステアリング装置を提供する
【解決手段】アシストトルクを決定するアシスト決定部120は、ハンドルトルク推定値Thに基づいてハンドル側アシストトルクを決定するハンドル側アシスト決定部121と、路面反力トルク推定値Tlに基づいて路面側アシストトルクを決定する路面側アシスト決定部122とを備え、ハンドル側アシスト決定部121をフィルタとし、路面側アシスト決定部122は、路面反力トルク推定値Tlを定数倍する増幅器とする。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】トルク変動の発生を抑えつつ、加算角に含まれるモータ回転角速度の推定誤差を補正して、安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】加算角調整演算部は、トルク偏差Δτに基づき第1変化成分が演算される方向に応じて、推定モータ回転角速度(ωm_e)に対応する第1の閾値dθlim1、及び当該第1の閾値dθlim1よりも推定モータ回転角速度(ωm_e)から離れた値を有した第2の閾値dθlim2を設定する。そして、これら二つの閾値(dθlim1,dθlim2)により規定される制限範囲内に加算角θaを制限する。更に、加算角調整演算部は、制御角と実回転角との乖離を示す負荷角を推定する。そして、その負荷角が安定領域外にある場合には、上記第1の閾値dθlim1を、推定モータ回転角速度(ωm_e)から、その想定される推定誤差の最大値に対応する所定値N2離れた値に変更する。
(もっと読む)
電動パワーステアリング装置
【課題】 電流センサ31が故障した場合でも、操舵アシストの追従性の低下を抑制して、良好な操舵アシストを継続させる。
【解決手段】 異常時制御量演算部80においては、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算する。また、回転角速度推定部82が操舵トルクセンサ21に設けられた回転角度センサ21bの回転角度θoutを微分してモータ回転角速度ωを推定し、補正電圧演算部83がモータ回転角速度ωに比例した補正電圧V1を計算する。電圧値加算部84は、基本電圧V0に補正電圧V1を加算して電圧指令値V*を計算する。
(もっと読む)
電動パワーステアリング装置
【課題】マイクロコンピュータが故障した場合においても、操舵トルクに応じた補助操舵力を、簡易・小型かつ信頼性の高い構成で、ステアリング系に付与することを可能とする電動パワーステアリング装置を提供する。
【解決手段】第1電動機駆動信号(PWM信号MCU)を発生するフィードバック制御の第1電動機駆動信号発生手段(例えばマイクロコンピュータ102)に故障が生じた場合には、第2電動機駆動信号発生手段(例えば、ディスクリート部品によって構成されるPWM信号発生部66)による操舵トルク信号VT3の直接変換によって発生した第2電動機駆動信号(PWM信号TS)に基づいて電動機36を駆動する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部74は、電流指令上限値演算部73が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部73に設けられた切替制御部75は、演算周期毎のモータ回転角変化量に相当する加算角の基礎成分、即ちトルク偏差Δτに基づく第1変化成分dθτ、及びモータの回転により生ずる誘起電圧(誘起電圧二乗和Esq_αβ)に基づいて、モータの制御状態が安定的であるか否かを判定する。そして、切替制御部75は、その制御状態が不安定であると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】第2制御部は、目標操舵トルクτ*に実際の操舵トルクを追従させるべく、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより制御上の仮想的な回転角を演算する。また、第2制御部は、トルク偏差Δτに基づくγ軸電流増減値ηを演算し、当該γ軸電流増減値ηを積算することによりγ軸電流指令値Iγ*を演算する。そして、上記制御上の回転角に従う回転座標系において電流フィードバック制御を実行する。更に、第2制御部(電流指令値演算部61)は、上記γ軸電流指令値Iγ*を電流指令上限値以下に制限する電流指令値制限部73を備える。そして、当該電流指令値制限部73は、上記トルク偏差Δτに基づいて電流指令上限値を変更する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】遅れなく振動を抑制することができ、操舵フィーリングの優れた電動パワーステアリング装置を提供する。
【解決手段】ECU23は、モータ制御信号を出力するマイコン41と、そのモータ制御信号に基づいてモータ21に駆動電力を供給する駆動回路42とを備えた。マイコン41は、電流偏差ΔIにF/BゲインKを乗ずることにより電圧指令値V*を演算するF/B制御部57と、電圧指令値V*に基づいてモータ制御信号を生成するPWM変換部58とを有するモータ制御信号出力部44を備えた。そして、モータ制御信号出力部44に、車両が直進状態である場合にF/BゲインKの値を低応答値に変更するF/Bゲイン演算部61を設けた。
(もっと読む)
1 - 20 / 255
[ Back to top ]