
Fターム[3D232DC18]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 位相補償 (262) | 遅延要素 (40)
Fターム[3D232DC18]に分類される特許
1 - 20 / 40
電動パワーステアリング装置
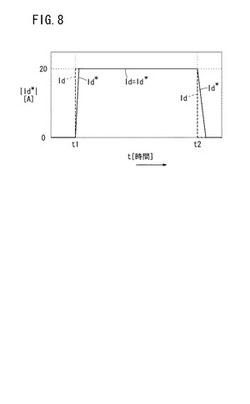
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置

【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
操舵制御装置
【課題】アシストゲインの大きさにかかわらず操舵に関する応答性を確保可能な操舵制御装置を提供する。
【解決手段】トルクセンサ30は、操舵トルクが入力されるステアリングシャフト10の回転角度と、車両のタイヤ5に接続されたステアリングシャフト20の回転角度との差に基づき操舵トルクを検出する。制御部50は、トルクセンサ30により検出された操舵トルクが入力される入力部51を有し、前記操舵トルクに基づき転舵アシストトルクを算出し、前記転舵アシストトルクをタイヤ5に対し付与するよう電動モータ40を作動させる。制御部50は、入力部51からトルクセンサ30までの開ループ周波数応答特性のゲイン余裕および位相余裕を所定値以上確保し、かつ、操舵トルクからタイヤ5の角度までの閉ループ周波数応答特性のゲインを所定の周波数帯において定常ゲインよりも高くする。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
車両運動制御システム
【課題】旋回運動の安定化制御の干渉を防止できる車両運動制御システムを低コストで提供することを目的とする。
【解決手段】車両運動制御システムは、駆動輪である左右前輪に異なる駆動力を配分することにより車両にヨーモーメントを発生させる左右駆動力配分装置と、車両の転舵輪である前輪の向きを変更する操向ハンドルの操作角θHに応じて後輪のトー角を変更する後輪トー角制御装置と、を少なくとも備える。左右駆動力配分装置は左右駆動力配分制御ECU37を有し、フィードフォワード部71とフィードバック制御部73と駆動力配分量制御状態モニタ部75を有している。駆動力配分量制御状態モニタ部75が、車両の旋回方向のヨーレイトを増加させる方向に作動しているときには、後輪トー角制御ECU36における第2補正部67は、操向ハンドルの操作角θHの向きと逆相に後輪のトー角を制御しない。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 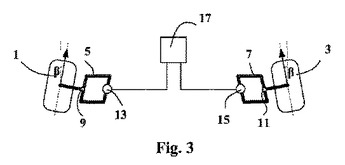 (もっと読む)
(もっと読む)
電動パワーステアリング装置
【課題】 逆入力状態の判定を適切に行う。
【解決手段】 q軸指令電流Iq*と、q軸実電流Iqとを入力し、その電流差ΔIq(|Iq*|−|Iq|)が判定基準値Irefを越えた場合には、タイヤから逆入力が働いていると判定する。更に、操舵トルクセンサ22により検出される操舵トルクTが基準トルクTrefより大きくなっている状態が基準時間以上継続した場合にも、タイヤから逆入力が働いていると判定する。更に、回転角センサ21により検出される回転角θmに基づいて操舵速度ωを算出し、操舵速度ωが判定基準値ωrefを越えた場合にも、タイヤから逆入力が働いていると判定する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵補助力を発生させるモータに取り付けられたモータ角センサからハンドルの相対舵角、モータ角速度を算出することにより、SAT検出値を用いて中立点角度を高精度に推定することができ、同時に絶対角の算出が可能な電動パワーステアリング装置の制御装置を提供する。
【解決手段】車両のステアリング機構にアシストトルクを付与する電動パワーステアリング装置の制御装置において、モータ角を検出するモータ角センサと、車両のSATを検出するSAT検出手段と、モータ角よりステアリングの相対舵角を検出する相対舵角検出部と、モータ角速度を求める舵角速度検出部と、車速検出部とを具備し、舵角速度、SAT検出値及び車速に基づいて車両の直進走行の判定を行い、直進走行が所定時間以上継続したときの相対舵角を中立点角度とする演算を行う中立点演算部と、中立点演算部で得られた中立点角度及び相対舵角の差分で絶対舵角を求める絶対舵角演算部とを設ける。
(もっと読む)
電動パワーステアリング制御装置
【課題】演算量が少なく、なおかつ設計が体系的かつ簡便な操舵制御装置を得ること。
【解決手段】操舵トルクを操舵トルク信号として検出する操舵トルク検出器と、操舵トルク信号に対して第1のゲインによる増幅とローパスフィルタとを作用させた信号と前記操舵トルク信号に対して少なくとも第2のゲインによる増幅を作用させた信号とに基づいて、操舵トルク信号に対して位相遅れ補償を定数倍した周波数応答特性を有する演算を行う位相遅れ補償部と、位相遅れ補償部の出力に基づく電流指令にモータの電流が一致するようモータの制御を行う電流制御部と、を備える。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵補助指令値を、状況に応じて精度良く効率的に制限できるようにすると共に、トルク変動についても確実に抑制できるようにすることにより、より信頼性の高い電動パワーステアリング装置の制御装置を提供する。
【解決手段】操舵トルク及び車速に基づいてアシストマップを参照して演算された操舵補助指令値により操舵系にアシストトルクを付与するモータを駆動制御する電動パワーステアリング装置において、所定の条件に従って操舵補助指令値を制限する操舵補助指令制限値を算出する操舵補助指令制限値算出部を具備し、操舵補助指令値と操舵補助指令制限値との偏差又は比率に基づいて、操舵補助指令値が操舵補助指令制限値を超えないように制限する。
(もっと読む)
電動パワーステアリング装置
【課題】車両応答の悪化を抑制しつつ、操舵フィーリングの悪化をも防ぐ。
【解決手段】車両転舵制御装置(10)は、ドライバの操舵入力に応じた操舵トルク及び操舵角の少なくとも一方に基づいて、操舵入力を補助するためのアシスト操舵力を算出する第1算出手段(30)と、アシスト制御力を操舵入力における操舵トルクに付与する操舵力付与手段(10)と、アシスト操舵力を付与された操舵トルクに対する車両挙動又は操舵入力における操舵角の特性が、(i)操舵入力における操舵周波数fが所定値以下となる範囲のうちの少なくとも一部において、操舵周波数fが所定値以下となる範囲のうちの他の一部における操舵トルクに対する車両挙動又は操舵角の特性よりも増大し、且つ、(ii)操舵周波数fが所定値以上となる範囲において、操舵周波数fが大きくなるほど低減するように、第1算出手段を制御する操舵力制御手段(30)とを備える。
(もっと読む)
車両用操舵装置
【課題】左右の転舵輪の実舵角を車速に応じてきめ細かに独立して制御することができる車両用操舵装置を提供する。
【解決手段】運転者が操舵する操舵機構2と、該操舵機構2とは切り離されて転舵輪3FL,3FRを転舵する転舵機構4と、前記操舵機構4の入力舵角を検出する舵角検出手段102と、車両の車速を検出する車速検出手段103とを備え、前記転舵機構4は、左右の転舵輪に対して個別に転舵力を付与する独立した一対の転舵アクチュエータ43L,43Rを有する転舵部と、前記舵角検出手段102で検出した入力舵角と前記車速検出手段で検出した車速とに基づいて前記一対の転舵アクチュエータ43L,43Rを左右の転舵角が前記車速に応じて連続的に変化するように制御する転舵角制御手段101とを備えている。
(もっと読む)
車両転舵制御装置
【課題】ステアリングの収束性を向上させつつ、車両の収束性をも向上させる。
【解決手段】車両転舵制御装置(10)は、車両の乗員の操舵操作に応じた操舵トルク(MT)に基づいて基本アシスト操舵力(AT)を算出する第1算出手段(30)と、前輪(5、6)及び後輪(7、8)の夫々の横力(Ff、Fr)を取得する取得手段(30)と、後輪の横力に基づいて基本アシスト操舵力を低減させる第1の補正操舵力を算出し、且つ前輪の横力に基づいて基本アシスト操舵力を増大させる第2の補正操舵力を算出する第2算出手段(30)と、基本アシスト操舵力に対して第1の補正操舵力及び第2の補正操舵力の夫々を加算することで得られる目標アシスト操舵力(T)を付与する操舵力付与手段(10)とを備える
(もっと読む)
電動パワーステアリング装置
【課題】ハンドルの保舵時やゆっくりした操舵時でも、ハンドルを介した振動や騒音が発生せず、操舵フィーリングの良いハンドル操舵が期待できる電動パワーステアリング装置を提供する。
【解決手段】車両の操舵系に操舵補助力を付与するようにしたモータ108と、ハンドルに作用する操舵力を検出するトルクセンサと、モータの電流を検出する電流検出器202とを備え、トルクセンサの出力値に基いて決定される電流指令値Irefとモータの電流Imとの偏差を入力とする電流制御器Aの出力に基いてモータ108をフィードバック制御する電動パワーステアリング装置において、電流制御器Aの定常ゲインが有限であると共に、電流フィードバック制御部の前段に応答性を補償する位相補償器24を設ける。
(もっと読む)
車両用制御装置
【課題】エンコーダを使った回転位置の検出をさらに確実に行えるようにする。
【解決手段】車両用制御装置1は、ステアリングホイール2と共に多回転するステアリングシャフト3の回転位置を絶対値で検出する第1のエンコーダ13を有し、第1のエンコーダ13の出力が第1のカウント手段21に接続されている。第1のカウント手段21は、第1のエンコーダ13の回転数をカウントするエンコーダ回転数カウント回路31と、回転数の情報と第1のエンコーダ13のエンコーダ信号を合成してエンコーダ全体桁信号を作成するエンコーダ全体桁読み込み回路40とを有する。エンコーダ全体桁信号は、操作制御部42に入力され、操向制御や操舵制御に利用される。
(もっと読む)
車両用操舵システム
【課題】自動操舵制御の精度を向上できる車両用操舵システムを提供すること。
【解決手段】この車両用操舵システム1は、車両10の操舵輪11FL、11FRを電動機24にて駆動して操舵輪11FL、11FRの操舵角を制御するEPS装置2を有する、また、車両10の走行時にて、EPS装置2が車両10の操舵輪11FL、11FRを自動操舵することにより、ドライバーのステアリング操作が支援される。この車両用操舵システム1では、通常操舵時にて、EPS装置2がステアリングホイール12の反力トルクを制御対象としてアシストトルクを発生するトルク制御を行う。また、自動操舵時にて、EPS装置2が操舵輪11FL、11FRの操舵角を制御対象とする角度制御を行う。
(もっと読む)
パワーステアリング機構の制御装置
【課題】 慣性補償制御と粘性補償制御との間の制御干渉を廃しながら、パワーステアリング機構によるアシストトルクを高精度で制御する。
【解決手段】
操舵角に応じて操舵輪の舵角を変更する舵角変更機構13と、電動モータ15を有し舵角変更機構13を駆動するパワーステアリング機構14と、操舵力と車速とに基づいてパワーステアリング機構14から出力される基本駆動力を演算する基本駆動力演算手段41と、基本駆動力を補償しパワーステアリング機構14の慣性を抑制する慣性補償制御を実行する慣性補償手段42と、電動モータ15の回転角加速度の増大に従って基本駆動力の大きさを低減させる粘性補償制御を実行する粘性補償手段44と、慣性補償制御の実行開始時期よりも粘性補償制御の実行開始時期を遅らせる補償制御時期調整手段47とを備えて構成する。
(もっと読む)
電動パワーステアリング装置
【課題】
高速操舵性を確保でき、且つ、ハンドルの保舵時やゆっくりした操舵時の場合だけでなく、ハンドルの切り返し時などの速い操舵時にも、ハンドルを介した振動や騒音を発生せず、操舵フィーリングの良いハンドル操舵が期待できる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の中に、電動パワーステアリング装置内の各種アナログ信号のAD変換時に生じた量子化誤差を平滑するための平滑フィルタを適切に設けることにより、その量子化誤差を平滑化して、量子化誤差に起因するトルクリップルを抑制する。また、モータの回転速度、ハンドルの操舵状態やモータの制御方式に応じて、平滑フィルタを適切にオン・オフさせることによって、高速操舵性の確保と保舵時及びゆっくりした操舵時のハンドルの振動や騒音の抑制との両立を可能にした。
(もっと読む)
車両用走行制御装置
【課題】運転者に制御介入時の違和感を与えることなく、かつ安価な構成で車両の安定性を維持することができる車両用走行制御装置を提供する。
【解決手段】車両のタイヤ9が路面から受ける実路面反力トルクTalignを検出する路面反力トルク検出手段15と、車両のハンドル2の操舵角θを検出する操舵角検出手段5と、車両の車速Vを検出する車速検出手段10と、操舵角θおよび車速Vに基づいて、線形的な路面反力トルクである規範路面反力トルクTrefを演算する規範路面反力トルク演算手段16と、実路面反力トルクTalignと規範路面反力トルクTrefとの偏差および割合のうち、少なくとも一方に基づいて、車両の挙動状態を推定する挙動状態推定手段17と、挙動状態に応じて車両の駆動力を制御する駆動力制御手段18とを備えたものである。
(もっと読む)
1 - 20 / 40
[ Back to top ]