
Fターム[3D232DD00]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388)
Fターム[3D232DD00]の下位に属するFターム
メモリーマップによる制御系の目標値の設定 (1,523)
演算(関数等)による制御系の目標値の設定 (1,276)
制御系の切換 (219)
制御ゲインの設定 (997)
伝達関数 (123)
規範モデル(制御目的を定式化したモデル)を有するもの (265)
デジタル制御 (23)
デューティー制御(PWM制御) (909)
ファジィー制御 (8)
ニューロ制御 (6)
評価関数を持つもの(最適制御) (66)
適応制御 (18)
学習制御 (53)
フィードバック制御 (1,615)
フィードフォワード制御 (237)
その他 (48)
Fターム[3D232DD00]に分類される特許
1 - 2 / 2
電動機の制御装置
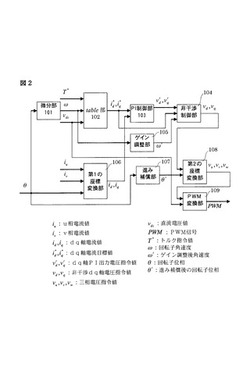
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
ステアリングパラメータ最適化システム

【課題】市場において実際に車両を運転する個々のドライバの特性に合わせたステアリングの味付けを実現する。
【解決手段】車両特性同定部10で車両モデルのパラメータを同定すると共にドライバ特性同定部20で現在のドライバの運転特性を表現するドライバパラメータを同定する。これらの車両パラメータ及びドライバパラメータは修正操舵量推定部30に出力されてドライバ−車両系のモデルによるシミュレーションが実施され、ドライバの目標走行軌跡に対する修正操舵量が計算される。修正操舵量推定部30の推定結果はパラメータ学習部40で学習され、この学習によって最適化された修正操舵量がパラメータ適応部50に出力されてステアリングパラメータの変更量が決定される。これにより、市場において実際に車両を運転する個々のドライバの特性に合わせたステアリングの味付けを実現することができる。
(もっと読む)
1 - 2 / 2
[ Back to top ]