
Fターム[3D232DD02]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 演算(関数等)による制御系の目標値の設定 (1,276)
Fターム[3D232DD02]に分類される特許
1 - 20 / 1,276
車両用操舵装置
電動パワーステアリング装置
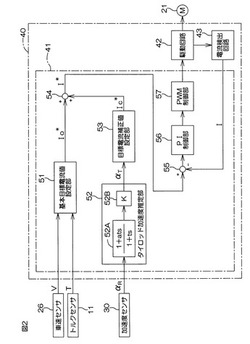
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
ステアリング制御装置

【課題】走行モードの切換時において簡単な制御によって作業性を向上させたステアバイワイヤ方式のフォークリフトのステアリング制御装置を提供する。
【解決手段】ハンドルと、ドライブ輪と、制御手段と、走行モード切換手段と、第1および第2の走行モードにおけるハンドルの操作角度θHとドライブ輪の旋回角度θDの第1および第2の対応関係とθDの第1および第2の有効角度範囲を記憶する記憶手段とを備え、ハンドルが第1の操作角度θH1に配置されてドライブ輪がθH1に対応する第1の旋回角度θD1に配置された状態の第1の走行モードを第2の走行モードへ切換える時、θD1が第2の有効角度範囲になく、θH2=θH1+360×N(Nは整数)なる第2の操作角度θH2に対応する第2の旋回角度θD2が第2の有効角度範囲に存在する場合に、制御手段はθH1を第2の有効角度範囲のθD2に対応するθH2に変更してθD1をθD2に変更する。
(もっと読む)
インホイールモータ車用転舵装置
【課題】転舵アクチュエータを用いて、アッパアームに設けた上下方向の転舵軸周りに車輪を回転させるインホイールモータ車用転舵装置において、転舵の際の抵抗を小さくする。
【解決手段】車両のアッパアームに設けた上下方向の転舵軸20周りに転舵手段33を備え、前記転舵手段33は、転舵アクチュエータ10の動作によりホイールwを前記転舵軸20周りに回転させて転舵する機能を有し、前記転舵アクチュエータ10の動作は、前記転舵手段33とは別に設けた操舵入力装置31からの入力信号に基づき制御手段32が制御し、前記制御手段32は、前記ホイールwが転舵する際に前記入力信号に基づいて、そのホイールwに設けた制動手段35の制動を解除又は弛緩する制御を行うインホイールモータ車用転舵装置とした。
(もっと読む)
車両用操舵装置
【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
ラック軸力推定方法及び電動パワーステアリング装置
【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
電動パワーステアリング制御装置
【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
車両姿勢制御装置
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
走行進路生成装置および走行制御装置
【課題】 生成した走行進路に基づいて実進路の走行を行うにあたり、実進路をスムーズなものとし、車両の乗員に与える違和感を小さくすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における走行進路演算部13は、ルート算出部12で算出したルート12に含まれる今回目標通過点と、走行進路記憶部14に記憶された前回走行進路に含まれる前回目標通過点を用いて、今回走行進路を生成する。ここで、前回目標通過点には、車両の近傍における固定目標通過点と固定目標通過点以外の探索目標通過点が含まれており、今回走行進路を生成するにあたり、固定目標通過点は固定とし、探索目標通過点を適宜今回目標通過点に変更して今回走行進路を生成する。
(もっと読む)
四輪操舵制御装置
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
油圧式パワーステアリング装置
【課題】切り込み状態から操舵部材が中立位置に向かって戻される場合に、切り込み方向の操舵補助力が不足するのを抑制できる油圧式パワーステアリング装置を提供する。
【解決手段】ダンピング制御部62は、検出操舵トルクThの方向が切り込み方向でありかつその大きさ(絶対値)が第1の閾値以上であり、操舵角速度ωhの方向が切り戻し方向でありかつその大きさ(絶対値)が第2の閾値以上のときに、操舵角速度ωhに応じたダンピングトルク指令値TD*を設定する。加算部63は、基本アシストトルク指令値設定部61によって設定される基本アシストトルク指令値TAO*に、ダンピング制御部62によって生成されるダンピングトルク指令値TD*を加算する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
カウンタウエイト台車制御装置
【課題】カウンタウエイト台車の旋回走行時に車輪の旋回半径が大きくなることを抑制し、クレーンの作業効率を向上させる。
【解決手段】カウンタウエイト台車制御装置1は、車輪40の操舵角度θを制御する操舵アクチュエータ50と、操舵アクチュエータ50を制御する制御手段80と、を備える。制御手段80は、上部本体20の旋回方向を判別可能な信号が入力される旋回方向入力手段81を備える。制御手段80は、平面視において、車輪40の位置における車輪40の旋回軌道Cの接線L1よりも車輪40(の前後方向前側)が内側を向くように操舵アクチュエータ50を制御する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
電動パワーステアリング制御装置
【課題】車載装置からの指令に基づく制御と通常のパワーステアリング制御との両立を安価な手段で実現可能な電動パワーステアリング制御装置を得る。
【解決手段】メインマイコン503とメインマイコン監視回路511とを備える。メインマイコン503は、トルク信号TRQに基づきパワーステアリング指示電流ImtEPSを決定するパワーステアリング制御部503cと、自動駐車制御信号PASigに基づき自動駐車制御電流ImtPAを決定する自動駐車制御部503dと、モータ電流指示値Imt1を切替える切替信号生成処理部503eおよびモータ電流切替部503fと、監視特性を切替える監視回路モード選択部503jおよび監視回路特性切替部503mとを有する。メインマイコン監視回路511は、モータ電流検出信号Imdが制限値を超えた場合に異常状態と判定して制御を停止する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動モータの抵抗の推定精度が低下することを抑制することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の電子制御装置30は、測定電流Imaおよび測定電圧Vmaを用いて第1抵抗値Raを算出する第1抵抗算出部61と、この第1抵抗算出部61とは異なる手段により第2抵抗値Rbを算出する第2抵抗算出部62とを有する。そして第2抵抗値Rbよりも小さい第1抵抗値Raを演算抵抗値として確定する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
車両の走行制御装置
【課題】車両を目標走行ラインに沿って走行させるため操舵輪の舵角が目標舵角になるよう舵角可変装置を制御する方法を提供する。
【解決手段】操舵輪の舵角δが目標舵角δtになるよう舵角可変装置を制御することにより車両を目標走行ラインに沿って走行させる車両の走行制御装置に於いて、操舵輪の目標舵角に対する実舵角の追従性悪化の指標値δerrが基準値δcよりも大きいときには、車両の目標状態量γtは目標舵角に基づく車両の目標状態量に設定され、これにより舵角の追従性悪化に起因する車両の走行ラインの目標走行ラインからのずれが車両の目標状態量に基づく走行運動の制御によって低減される。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
1 - 20 / 1,276
[ Back to top ]