
Fターム[3D232EB08]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 中立位置 (123)
Fターム[3D232EB08]に分類される特許
1 - 20 / 123
運転支援装置
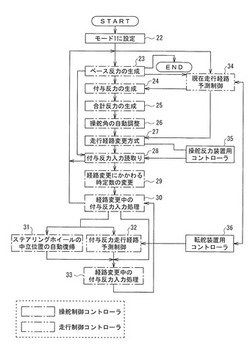
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
電動パワーステアリング装置

【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、ヨーレートセンサを含む複数の変量検出部の検出値の絶対値が所定の範囲内にあり、かつ、ヨーレートセンサの検出値の今回値の絶対値が前回値の絶対値より小さいということを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
操舵装置及び操舵制御装置
【課題】操舵フィーリングを向上させることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ操舵操作が可能である操舵部材5と、操舵部材5に対する操舵操作を補助するアクチュエータ9と、アクチュエータ9を制御し、操舵部材5の中立位置側からの切り込み操作に対応した当該操舵部材5の中立位置側への切り戻し操作を補助する戻し操作補助制御を実行可能であり、切り込み操作の際の操舵部材5の操舵量に応じて、当該戻し操作補助制御を実行する際の切り戻し操作時間を決定する操舵制御装置11とを備えることを特徴とするので、操舵フィーリングを向上させることができる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
操舵装置
【課題】補助操作によるステアリングの操作入力の0点学習を正確に行うことができる操舵装置を提供する。
【解決手段】操舵装置1は、通常の回転操作(主操作)と車両前後方向に押し引きする操作(補助操作)とが実施可能なステアリング2と、このステアリング2を押し引き方向に駆動する押し引き反力アクチュエータ8と、操舵ECU9と、シフトレバーの位置を検出するシフトセンサと、車両の車速を検出する車速センサと、エンジンを始動するためのイグニッションスイッチとを備えている。操舵ECU9は、シフトレバーの位置がPレンジにあるとき、イグニッションスイッチがOFFであるとき、車両の車速がゼロであるときに、ステアリング2の押し引き位置を基準位置(中立位置)に戻すように押し引き反力アクチュエータ8を制御する。
(もっと読む)
リーチ式フォークリフト
【課題】安価でハンドルの操作性が良く、別途機器を設けることなくハンドル回転角の原点を正確に検出できるリーチ式フォークリフトを提供する。
【解決手段】走行及び換向を行う駆動用車輪5と、操舵装置31及び操舵制御装置51とを有するリーチ式フォークリフトであって、操舵装置31に、ハンドル32の軸部に設けられた軸受34の回転側と非回転側とに亘って設けられて磁気力を介してハンドル32の回転変位量を検出する磁気式エンコーダ35と、駆動用車輪5の換向を補助する換向補助電動機46とを具備させ、操舵制御装置51に、磁気式エンコーダ35で検出された回転変位量に基づいてハンドル32の回転角を算出するハンドル角演算部53と、換向補助電動機46からの電流が所定値以上の時にハンドル角演算部53での回転角を補正するハンドル角補正部58とを具備させたものである。
(もっと読む)
車両用操舵装置
【課題】運転者に違和感を与えることなく中立ズレを補正することが可能な車両用操舵装置を提供する。
【解決手段】所定の減速比を介して接続された複数の回転要素が、共通速度線図上に、ステアリングホイールと、第1モータ20aと、第2モータ53と、操向輪を転舵する転舵用出力要素が接続された車両用操舵装置において、ステアリングホイールの目標操舵状態量を設定する目標操舵状態量演算部122aと、目標操舵状態量に基づいて転舵用出力要素の目標転舵状態量を設定する目標転舵状態量演算部122bと、目標操舵状態量演算部122aにより設定された目標操舵状態量と、目標転舵状態演算部122bにより設定された目標転舵状態量に基づいて、第1モータ20aと第2モータ53の制御量を設定する目標モータ制御量演算部と、を設けた。
(もっと読む)
センサの基準点補正方法
【課題】走行状態の車両と停車中の車両における周囲温度の変化の影響を好適に回避してヨーレートセンサの基準点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車し、停車した状態で所定時間ΔTstが経過したときに1回だけヨーレート中点補正する。そして、走行状態になることなく、停車した状態のままで所定時間ΔTstが経過した後は、ヨーレート中点補正しないことを特徴とする、センサの基準点補正方法。
(もっと読む)
舵角中点学習方法及び舵角反力制御方法
【課題】アイドルストップの直後から、運転者に与える違和感を少なく、舵角に応じたステアリングのアシスト制御が行える舵角中点学習方法を提供する。
【解決手段】所定条件によりアイドルストップを自動的に行うアイドルストップ機構を有する車両21に設けられる舵角センサ11の舵角中点を学習する舵角中点学習方法において、アイドルストップを行った場合は、アイドルストップ前に学習した舵角中点を記憶し、アイドルストップが解除されたときに、学習に替えて記憶された舵角中点を読み出す。ただし、アイドルストップ中に、操舵輪10の転舵方向にトルク変動があった場合は、記憶された舵角中点をキャンセルする。
(もっと読む)
センサの基準点補正方法
【課題】車両の始動直後に走行開始する場合であってもヨーレートの中点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車してから、停車した状態で所定時間ΔTstが経過したときにヨーレートセンサのヨーレート中点を補正する、センサの基準点補正方法において、車両の始動時には、所定時間ΔTstより短い所定時間ΔTst’に亘って車両Vが停車しているときに、ヨーレートセンサを暫定中点補正することを特徴とする。
(もっと読む)
車両の後輪操舵制御装置
【課題】アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたときに車両が直進するように後輪を操舵する制御装置を提供する。
【解決手段】車輪を車体に懸架するサスペンション7をアクチュエータで駆動するアクティブサスペンション装置が設けられた車両の左右後輪を操舵制御する後輪操舵制御装置である。この装置は、車両の運動状態量を検出する状態量検出手段17,18,19を備えている。そして、アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたとき、検出された前記運動状態量に基づいてロール角を算出し、このロール角に応じて車両が直進するように後輪を操舵するように構成する。
(もっと読む)
車両用舵角制御装置及び車両用舵角制御方法
【課題】前輪転舵アクチュエータ5の異常が解消してから通常の4輪操舵制御に復帰する時間を短縮する。
【解決手段】前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出していない場合には、後輪の転舵角を中立位置の角度に制御すると共に前輪転舵アクチュエータ5の駆動を禁止し、前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出している場合には、上記前輪転舵アクチュエータ5及び後輪転舵アクチュエータ9の駆動を禁止する。更に、上記後輪転舵アクチュエータ9の異常を検出した後に、当該後輪転舵アクチュエータ9の異常が検出されなくなると、上記後輪の転舵角を中立位置の角度に制御する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵角センサが故障しても、所定の戻し力電流を継続的に流して電動モータを制御し、ステアリングホイールを中立位置に戻す舵角戻し制御を行う電動パワーステアリング装置を提供する。
【解決手段】操舵角センサ11が出力する操舵角の検出値は、スイッチ51を経て混合操舵角算出部43へ入力される。レゾルバ14が出力するレゾルバ情報に基づいて、変換操舵角算出部42bで変換操舵角が算出され、この変換操舵角がスイッチ52を経て混合操舵角算出部43へ入力される。混合操舵角算出部43は、操舵角の検出値と変換操舵角との並列冗長信号を入力し、操舵角の検出値と変換操舵角にそれぞれ重み付けをして、両者を混合して混合操舵角を生成する。そして、混合操舵角算出部43から出力された混合操舵角によって舵角戻し制御を実行する。レゾルバ14が故障しても、操舵角センサ11からの操舵角の検出値が継続的に送信される。
(もっと読む)
電動パワーステアリング制御装置
【課題】操舵速度に応じた操舵感を向上させた電動パワーステアリング制御装置を得ること。
【解決手段】操舵トルクを検出する操舵トルク検出器と、操舵速度を検出する操舵速度検出部と、少なくとも1つの極である低域極および少なくとも2つの零点である中間零点を有する伝達関数の演算を操舵トルク検出器が検出した操舵トルクに対して行うことによって電流指令を出力する補償演算部と、操舵速度に応じて低域極または2つの中間零点の特性を変化させる伝達関数変更部と、電流指令に前記モータの電流が一致するようモータの制御を行う電流制御部と、を備える。
(もっと読む)
車両用操舵装置
【課題】操舵時に衝突してエアバッグが作動した場合にも、腕部が運転者の胸部等に干渉するのを防止できるようにした車両用操舵装置を提供する。
【解決手段】ステアリングホイール12の転舵状態で車両の衝突状態を検出した場合に、メインエアバッグ4の展開に先行して操作部12Hを握った運転者の手部Dhを把持して拘束するサブエアバッグ9と、メインエアバッグ4の展開に先行してステアリングホイール12を直進走行状態に戻すステアリングホイール回動手段と、を備える。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】 操舵反力特性をコンベンショナルな操舵装置の操舵反力特性に近づけることができる車両用操舵装置およびその制御方法を提供する。
【解決手段】 ハンドルと操向輪を転舵する舵取り機構とが機械的に分離され、ハンドルの操舵角に応じた転舵角に操向輪を転舵制御すると共に、ハンドルの操舵角に応じてハンドルに操舵反力を付与する車両用操舵装置において、操舵反力の位相を転舵角の位相よりも進ませる。
(もっと読む)
電動パワーステアリング装置
【課題】アイドルストップシステムが搭載された車両のアイドルストップからの復帰時に、直ちに、ステアリングホイールの操作に応じた操舵補助力を発生することができる省電力が考慮された電動パワーステアリング装置を提供する。
【解決手段】イグニッションオフ(点火信号の停止時、燃料噴射信号の停止時等)であっても、アイドルストップ時には、中点を記憶している揮発性の中点記憶部48に通電し続ける。アイドルストップからの復帰時に、揮発性の中点記憶部48に記憶された中点に基づき、直ちに的確な操舵補助力制御を開始することができる。
(もっと読む)
1 - 20 / 123
[ Back to top ]