
Fターム[3D232EC32]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 前後輪舵角比可変機構 (32)
Fターム[3D232EC32]に分類される特許
1 - 20 / 32
車両用操舵装置
【課題】ラジオノイズの検査や動作確認検査などを効率よく行うことのできる車両用操舵装置を提供する。
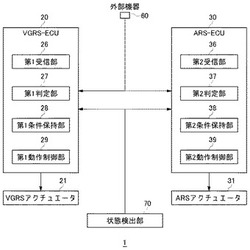
【解決手段】状態検出部70が、車両の状態を検出する。VGRS−ECU20において第1受信部26が外部からコマンドを受信すると、第1判定部27は、車両駆動手段の停止中に、検出される車両状態が、所定の検査モード移行条件を満たしているか判定する。第1動作制御部29は、所定の検査モード移行条件が満たされたことが判定されると、VGRSアクチュエータ21を検査モードで動作可能とさせる。
(もっと読む)
四輪操舵制御装置

【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両挙動の安定化させつつ、車両の前後輪の操舵をより適切に制御することを可能とする。
【解決手段】操舵制御装置100は、所定の走行軌跡を走行するように操舵輪の舵角を変更可能な操舵機構200を備えた車両10の操舵制御装置であって、車両を所定の走行軌跡に追従させるための操舵輪の目標舵角を特定する特定手段240と、特定された目標舵角を、前記車両の加速度に基づいて補正する第1の補正手段100と、操舵輪の舵角が前記補正された目標舵角になるように前記操舵機構を制御する制御手段100とを備える。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
低損失旋回による航続距離延長制御システム及び方法
【課題】前輪舵角と駆動力差モーメントとの最適な組み合わせによって旋回時に必要な横力を発生させることにより、コーナリング抵抗を低減することによってエネルギー消費を低減する低損失旋回による航続距離延長制御システムを提供すること。
【解決手段】航続距離延長制御システム100は、最適駆動力差モーメントNz*を算出する最適駆動力差モーメント演算手段101と、前輪舵角δfを算出する前輪舵角演算手段102と、各モータに配分するトルク指令値を算出し、その各トルク指令値に基づき各モータを個別に制御するトルク配分制御手段103とからなる。ドライバーが旋回半径に応じてアクティブステアリングを操作すると、前輪舵角のみで旋回する場合に必要となる前輪舵角指令δh*がアクティブステアリングから出力される。駆動力Faccはドライバーのアクセル操作から指令値として入力されるものとしてもよい。
(もっと読む)
車両の制御装置
【課題】レーンキープ制御とドライバの操舵意思を反映した操舵制御との干渉を制御品質を低下させることなく防止する。
【解決手段】本発明に係る車両の制御装置は、転舵輪に対し該転舵輪の舵角の変化を促す操舵力を付与可能な操舵力付与手段を備えた車両において、維持すべき目標走行路と車両との相対的位置関係を規定する位置状態偏差を検出する偏差検出手段と、検出された位置状態偏差に基づいて操舵力付与手段の制御量を決定する決定手段と、決定された制御量に従って操舵力付与手段を制御することにより車両の走行路を目標走行路に維持する制御手段と、ドライバの操舵入力を検出する操舵入力検出手段と、走行路が目標走行路に維持される期間において操舵入力が検出された場合に、この操舵入力が反映されるように操舵力付与手段の制御量の決定基準を補正する補正手段とを具備する。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両の後輪操舵制御装置
【課題】わだちを走行している車両が旋回を行う場合には、後輪を前輪と同位相に操舵させる車両の後輪操舵制御装置を提供する。
【解決手段】後輪操舵装置を備えた車両における後輪操舵制御装置において、少なくとも現在位置近傍を含み、車両の走行に関わる道路情報が取得された、もしくは記憶された道路情報確認手段120と、道路情報から、車両が軌条の溝を有する路面を走行すると判断されたとき、後輪を前輪の操舵方向と同相に操舵するよう後輪操舵マップ切り替え部122とを備えている。
(もっと読む)
操舵装置
【課題】運転者がステアリングホイールの操舵により期待した車両のヨー運動と実際の車両のヨー運動とを一致させ易くする。
【解決手段】電動パワーステアリング装置1のステアリングホイール2に一体結合されたステアリングシャフト3が、舵角比可変装置4を介して転舵機構のピニオン軸7に接続されている。ピニオン軸7は転舵機構のラック8に接続され、ラック8の両端にタイロッド9を介して左右の前輪10,10が連結されている。舵角比制御装置12は、ヨーレートゲインがほぼ1となるように操舵角に対する転舵角の舵角比を制御し、舵角比可変装置4は舵角比制御装置12から入力した舵角比信号に基づいて制御される。
(もっと読む)
車両挙動制御装置
【課題】複数の車両運動制御装置を用いて運動を協調制御させるに際し、各車輪のタイヤの荷重状態に応じて適切に所望の運動を実現させるタイヤ発生力を算出して無駄なエネルギ消費を抑える。
【解決手段】車輪3のタイヤ横力Fyおよびタイヤ前後力Fxを個別に可変制御することによって車両の挙動を制御する車両挙動制御装置10において、車輪のタイヤ横力とタイヤ前後力との制御割合を設定する制御割合設定部30と、運転者による運転操作量から目標ヨーレイトγTを算出する目標ヨーレイト算出部27と、車輪の実舵角から規範ヨーレイトγT0を算出する規範ヨーレイト算出部29とを備え、制御割合設定部30は、目標ヨーレイト算出部によって算出された目標ヨーレイトと規範ヨーレイト算出部によって算出された規範ヨーレイトとの差Δγが小さいほど、タイヤ前後力の制御割合を小さくするように構成する。
(もっと読む)
車両の後輪操舵制御装置、及び4輪操舵制御装置
【課題】左右輪の前後力差に基づく車両の偏向を後輪舵角修正制御により抑制する場合において、「修正舵角の変動に基づく車両の横方向への平行移動」の発生を抑制すること。
【解決手段】μスプリット制御時、左右輪の前後力差ΔFX及び運動状態量偏差ΔVMに基づいて車両の偏向を抑制するための安定化モーメントMSが演算され、この安定化モーメントMSに基づいて後輪修正舵角目標値δrtが演算される。このδrtに対して変動抑制処理がなされて後輪修正舵角目標値δrteが出力される。このδrteに基づいて実際の後輪修正舵角δraがδrteに一致するように後輪舵角修正制御がなされる。これにより、μスプリット制御時に発生する前後力差ΔFXの変動に基づく安定化モーメントMSの変動に起因するδrtの変動が抑制されて、「修正舵角の変動に基づく車両の横方向への平行移動」の主な原因である「実際の後輪修正舵角δraの変動」が抑制される。
(もっと読む)
操舵制御装置
【課題】運転者が意図した通りの車両姿勢で平行移動を実現させる操舵制御装置を提供すること。
【解決手段】前後輪を同位相にする平行移動モードを含む複数の操舵モードを切り替えながら実行する操舵制御装置100は、車両姿勢を検出する車両姿勢検出手段10と、平行移動モードにおける目標車両姿勢を決定する目標車両姿勢決定手段11と、車両姿勢検出手段10が検出した車両姿勢と目標車両姿勢とに基づいて前輪及び後輪のうちの少なくとも一方を転舵させ車両姿勢を修正する車両姿勢修正手段12と、を備える。
(もっと読む)
操舵制御装置
【課題】停車することなく連続的なモード切替を許容しつつ、モード切替時の後輪操舵アクチュエータへの負荷を低減すること。
【解決手段】本発明は、前後輪をそれぞれ独立に舵角制御し、走行中若しくは運転者による転舵中における2WSモードと4WSモードの連続的なモード切替を許容した操舵制御装置において、前輪若しくは後輪が中立位置にならない状態でモード切替を禁止することを特徴とする。
(もっと読む)
加加速度情報を用いた車両のヨーモーメント制御装置
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度(V)を検出する第1の検出手段と、車両の横方向の加加速度(Gy_dot)を検出する第2の検出手段と、車両のヨー角加速度(r_dot)を検出する第3の検出手段と、を有し、第2の検出手段で検出した車両の横方向の加加速度(Gy_dot)を第1の検出手段で検出した車両の前後方向の速度(V)で除した値(Gy_dot/V)と、第3の検出手段で検出した車両のヨー角加速度(r_dot)との差が小さくなるように、制御手段により車両のヨーモーメントを制御する。
(もっと読む)
操舵制御装置
【課題】運転者による操舵を補助するにあたり、運転者に与える違和感を低減すること。
【解決手段】操舵制御装置20は、目標軌跡設定部21と、操舵特性設定部22とを含んでいる。目標軌跡設定部21は、車両の進行方向に存在する回避対象物に関する情報と、車両の運転者の顔向き又は視線の少なくとも一方とに基づいて、車両の目標とする進行軌跡を設定する。操舵特性設定部22は、目標軌跡設定部21が設定した車両の目標とする進行軌跡に基づいて、車両の操舵特性を設定する。
(もっと読む)
車両操舵装置
【課題】ラックアシストタイプのパワーステアリングシステムを搭載した車両において正確に車両の減衰力を推定できる車両操舵装置を提供すること。
【解決手段】操舵力伝達系に設けられるラック52にアシスト力を与えて操舵アシストを行う車両操舵装置であって、ラック軸力とラック変位に基づいて車両の減衰力を推定する(S14)。これにより、ステアリングシャフト3の捩れによる位相を加味して減衰力を推定できるため、ラックアシストタイプのパワーステアリングを備えた車両において減衰力を精度よく推定することができる。
(もっと読む)
車両用操舵装置
【課題】車両挙動安定化制御を適切に行わせることによって、車両挙動をより一層安定化させることができる車両用操舵装置を提供する。
【解決手段】転舵角設定部31は、操作角δhに応じた転舵角設定値δFF*を求める。転舵角補正値演算部34は、実ヨーレートγと目標ヨーレートγ*との偏差Δγに応じた転舵角補正値δFB*を求める。ゲイン調節部41,42によってゲイン調節された転舵角設定値δFF*および転舵角補正値δFB*を用いて、目標転舵角δ*が求められる。目標反力トルクTm*のゲインは、ゲイン調節部43によって調節される。ゲイン制御部40は、車両挙動安定化制御中において、転舵角補正値δFB*が所定値以下のときに、転舵角設定値δFF*に対するゲインを上げ、転舵角補正値δFB*に対するゲインを下げ、目標反力トルクTm*に対するゲインを下げる。
(もっと読む)
1 - 20 / 32
[ Back to top ]