
Fターム[3D232GG01]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 一般車両(一般の道路を走行する車両) (3,372)
Fターム[3D232GG01]の下位に属するFターム
大型車両(バス、トラック) (31)
Fターム[3D232GG01]に分類される特許
201 - 220 / 3,341
電動パワーステアリング装置
【課題】テアリングホイールの中立位置近傍における路面からの外乱に対して、ヨー応答性を抑制するとともに、運転者のステアリング操作時のヨー応答性は良好なものとする電動パワーステアリング装置を提供する。
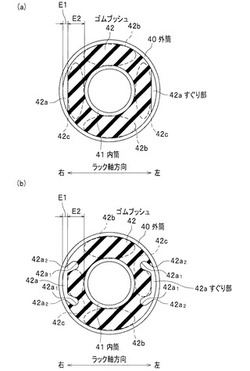
【解決手段】テアリングホイールから転舵輪に至る操舵力伝達経路に磁歪式トルクセンサを配置し、磁歪式トルクセンサで検出した操舵トルクに応じてステアリングアクチュエータを駆動して運転者のステアリング操作をアシストする電動パワーステアリング装置において、ステアリングホイール及び転舵輪間に配置されるステアリングギヤボックスを、磁歪式トルクセンサよりもバネ定数が小さいゴムブッシュ42を介して車体に支持する。ゴムブッシュ42は、その外周部のラック軸方向の周方向領域に一対のすぐり部42a,42aを有している。
(もっと読む)
電動パワーステアリング装置

【課題】アイドリング停止状態になってからの、操舵補助モータの実際の電力消費量と車両の電源負荷との関係を考慮して、最適な操舵アシスト量を設定する。
【解決手段】アイドリング停止状態になって、操舵補助モータ3の実際の電力消費量をインバータ消費エネルギー演算部37によって推定し、この消費エネルギーが大きなほど操舵補助モータ3に供給される電流の指令値を小さく制限する。インバータ消費エネルギー演算部37は、インバータ駆動回路12の消費電力を積算することにより、インバータ駆動回路12の消費エネルギーを算出する。
【効果】アイドリング停止時に、電源30を過負荷から保護しながら、最適な操舵アシスト量を設定することができる。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドル戻し状態時における、快適な操舵フィーリングを得ることのできる電動パワーステアリング装置を提供することにある。
【解決手段】操舵トルクが所定値1より大きく、操舵角速度が所定値2(ほぼゼロ値)より小さい場合には、ハンドルが保舵状態であると判定する。そして、ハンドル戻し制御時に、ハンドルが保舵状態にあると判定した場合には、ハンドル戻し制御のフィードバック制御の出力値をゼロとし、操舵トルクの増大を防止する。
(もっと読む)
PWM制御方法
【課題】作動状態は勿論、停止状態から低速で動きだす場合においても、滑らかな制御ができるPWM制御の制御方法を提供することである。
【解決手段】被駆動体と、当該被駆動体を駆動するモータと、前記モータをPWM制御するモータ制御手段と、を備え、前記PWM制御の1周期の中に、前記被駆動体の共振周波数に対応した周波数のパルス群からなる第1デューティと、前記第1デューティのパルス群の周波数よりも高い周波数のパルス群からなる第2デューティと、を有する。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵感の低下を防止しつつ、開発工数を低減させることが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10のモータ制御手段30は、トルク検出手段50によって検出される操舵トルクをゼロ又は第1所定値となるように制御する第1制御手段と、操作量検出手段52によって検出される操作量又は車両挙動検出手段130によって検出される車両の挙動量に基づいて、トルク検出手段50によって検出される操舵トルクをゼロ若しくは前記第1所定値よりも大きい第2所定値になるように制御する第2制御手段とを備える。前記モータ制御手段30は、前記第1制御手段の出力と前記第2制御手段の出力とに基づいてモータ22を制御する。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】温度変化などによるドリフトの影響を完全に除去することができるトルクセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】回転軸に生じるトルクに応じて互いに逆方向にインピーダンスが変化する2対の検出コイル13a〜13dを軸方向に配列したトルク検出部10と、前記2対の検出コイルのうち軸方向の両端側の2つの検出コイル13a,13dとこれらに直列に接続した抵抗体とで構成される第1のブリッジ回路210Aと、前記2対の検出コイルのうち軸方向の中央側の2つの検出コイル13b,13cとこれらに直列に接続した抵抗体とで構成される第2のブリッジ回路210Bと、前記第1のブリッジ回路210A及び第2のブリッジ回路210Bに個別に交流信号を印加したときの差分信号に基づいて少なくとも2組の検出トルクを演算するトルク演算部21A,21Bとを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】 レゾルバの検出コイルの一方が断線した場合でも、操舵トルクを検出できなくなる状況を低減する。
【解決手段】 第1レゾルバ110,第2レゾルバ120は、ハンドル中立状態におけるロータ部110r,120rとステータ部110s,120sとの相対位置関係が、sin相検出信号の振幅がゼロでcos相検出信号の振幅が最大となる位置を基準位置(θe=0°)として、その基準位置に対して電気角で45°+90°×K(Kは整数)だけずれるように、組み付け位相が設定されている。これにより、ハンドル中立状態においては、レゾルバの電気角が回転角不確定領域に入らなくなり、操舵トルクを検出できなくなる頻度が低下する。
(もっと読む)
測定された操舵角度に対して、決定された操舵角度を調整する方法およびデバイス
【課題】操舵システムのモータ回転子により連続的に決定される第1操舵角度を、ステアリングホイール付近に配置された操舵角センサによって連続的に測定される第2操舵角度に対して同期して調整する方法を提供する。
【解決手段】第1操舵角度LW*の第1時間プロファイルIが連続的に監視される工程と、第2操舵角度LW#の第2時間プロファイルIIが連続的に監視される工程と、第2操舵角度LW#に対する第1操舵角度LW*の調整がまだ実行されていない場合に、第1操舵角度LW*が第2操舵角度LW#の現在の値に設定される工程110と、第2操舵角度LW#に対する第1操舵角度LW*の少なくとも1回の調整が既に前もって実行されている場合であって、第1プロファイルIにおける符号の変化が生じている場合に、第1操舵角度LW*が、第2プロファイルIIにおいて生じるヒステリシスの関数として決定される工程120;140とを有する。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算負荷の増加を抑えつつ、インバータ出力の高い状態においても、精度良く、検出される各相電流値に基づいて異常検出を行うことのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、所定数αの電流検出周期に亘って、検出された各相電流値Ix(x=u,v,w)をその電流検出周期毎に記憶する(Ix_1,…,Ix_n、但し、「n」は自然数)。そして、当該所定数αの電流検出周期が経過した後、まとめて、その記憶領域に記憶した各相電流値Ix_1,…,Ix_nについて、三相(U,V,W)の総和に基づく異常判定をまとめて実行する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
車両の操舵制御装置
【課題】 トルクセンサを構成する複数のセンサの異常をそれぞれ正確に判別し、正常なセンサによる検出値を用いてアシストトルクを付与する車両の操舵制御装置を提供すること。
【解決手段】 電子制御ユニット28は、2つの磁気センサ24A,24Bのいずれかに異常が発生し、トルクセンサ20全体として異常が発生しているときには異常の発生している磁気センサを特定する。すなわち、ユニット28は、センサ24A,24Bからそれぞれ磁束密度の変化に起因して検出される回転トルクT1,T2を出力させるためにEPSモータ13を駆動させて出力側シャフト12a2に付与する回転トルクを変動させる。そして、ユニット28は、出力されたトルクT1,T2と判定トルクTrefとを比較して異常の発生している磁気センサを特定し、正常な磁気センサが検出した回転トルクを用いてアシストトルクを付与する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの推定温度が実際の温度より高くなり、過熱状態でないにも関わらず、電動モータの電流制限制御が行われることを防止できる電動パワーステアリング装置を提供することにある。
【解決手段】基板温度センサの今回値と前回値の差を絶えず検出し、基板温度センサの今回値が前回値に比較して大きく変化したときには、大きく変化する前の前回値を基板温度センサの基準値として記憶する。そして、基板温度センサ異常検出手段が検出した基板温度センサ異常が所定時間以上継続するまで、基板温度センサの基準値として記憶した基板温度センサの前回値を、基板温度の推定演算に使用する。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサにより操舵トルクを検出することができなくなった場合においても、モータによる操舵アシスト力を切り込み方向及び切り戻し方向の両方向に付与することを可能とし、特に、切り込み方向において切り込みすぎを防止しつつ適切なアシスト力を付与する電動パワーステアリング装置を提供する。
【解決手段】異常検出部80によりトルクセンサ20の異常が検出されたとき、レゾルバ58により検出されている回転角θrとアシスト電流特性とに基づいてモータ24を駆動し、駆動する際、回転角θrに基づき算出される回転角速度が大きくなるに従いモータ24を駆動するアシスト電流Iaを小さくするよう制御したので、切り込み方向において切り込みすぎを防止しつつ適切なアシスト力を付与することができる。
(もっと読む)
201 - 220 / 3,341
[ Back to top ]