
Fターム[3D232GG02]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 一般車両(一般の道路を走行する車両) (3,372) | 大型車両(バス、トラック) (31)
Fターム[3D232GG02]に分類される特許
1 - 20 / 31
車両の自動走行制御装置
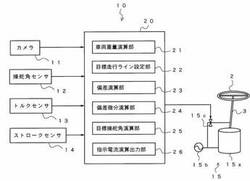
【課題】車両の自動走行制御装置に関し、動特性が変動した場合においても、目標走行ラインを安定して自動走行させる。
【解決手段】道路情報を検出するカメラ11と、目標走行ラインを設定する目標走行ライン設定部22と、目標走行ラインに対する車両の横方向相対位置を検出する相対位置検出部11,23と、車両重量を算出する車両重量演算部14,21と、車両を目標走行ラインに沿って走行させるための目標操舵角を算出する目標操舵角演算部25と、目標操舵角に基づいて自動操舵電流を算出する自動操舵電流演算部26と、自動操舵電流に応じてステアリング2を目標操舵角に回動させるアクュエータ15とを備えた。
(もっと読む)
自動操舵制御装置及びプログラム

【課題】補償処理を行うことにより不感帯による影響を軽減することのできる車両用の自動操舵制御装置を提供する。
【解決手段】自動操舵用アクチュエータの制御信号を補償する。スムース幅smwにより変化する補償後電流iと指示電流idの傾き変化を2段階α、βとした。a’とb’点の間に傾きαの線分L1を追加し、補償値の軌跡を、i軸値a'smw'、smw'b'及びa'b'までの長さで決める。不感帯除去の程度は角度αの大きさで決まり、スムース程度は角度βの大きさで決まる。補償性能の劣化しない目標としてスムース幅smwを調整し、その後、設定定数Kによりスムースの程度を調整するので、スムース幅smwを調整しなくでも、スムースの程度を調整できる。スムース幅smwを調整することによる不感帯補償性能の劣化を避け、ふらつきを低減できる。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車両のアクティブステアリング装置及びそのような装置を用いたステアリング機構
本発明は、パワーステアリング装置(50)が設けられたトラックのアクティブステアリング装置であって、出力軸(34)に、入力軸からの操舵輪角偏位と、位置決め手段によって操舵輪角偏位に重畳される操舵角偏位とを伝達するための差動型のステアリングホイールギヤ(10)を備えるアクティブステアリング装置に関する。本発明によれば、ステアリングホイールギヤ(10)における操舵輪角偏位の伝達が、パワーステアリング(50)が故障した際にトラックを手動で操舵できるようなレシオで、出力軸(34)への操舵輪角偏位をギヤダウンさせるギヤ段(a,b,c,d)によって行なわれる。 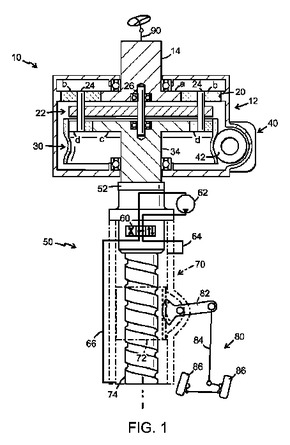 (もっと読む)
(もっと読む)
パワーステアリング機構
【課題】エンジンに直結された油圧ポンプにおける無駄な動力を削減することが出来て、車両の既存部品を生かして後付けが可能なパワーステアリング機構の提供。
【解決手段】油圧ポンプの吐出口(2o)と吸入口(2i)とを連通するバイパスライン(Lb)を有し、該バイパスライン(Lb)には流量調整弁(16)が介装されており、該流量調整弁(16)には制御装置(20)から開閉制御信号が入力され、制御装置(20)は、操舵角度センサ(18)が計測したステアリングの操作量と、操舵力センサ(19)で計測したパワーシリンダ(3)或いはナックルアーム(11)に作用する力とに基づいて、前記流量調整弁(16)を開閉制御する機能を有している。
(もっと読む)
運転中の車両のドライバーを補助するための方法及びシステム
本発明は、現在の運転シナリオに基づいて望ましくない状況を回避するために、運転中の車両のドライバーを補助する方法であって、前記望ましくない状況を回避するために、車両操舵装置に対する第1案内力が望ましいか否かを予測するステップ、そして、第1案内力が望ましい場合には、前記望ましくない状況を回避するために前記操舵装置に付与されることになる前記第1案内力を含む合計案内力を予測するステップ、予測された合計案内力と限界値とを比較するステップ、そして、該予測合計案内力が前記限界値を超える場合には、前記望ましくない状況を回避するために前記操舵装置に前記予測合計案内力を付与すべきか否かを事前に決定するステップを特徴とする方法に関する。 (もっと読む)
車両を操縦する方法及び装置、コンピュータ・プログラム、コンピュータ並びに車両
トラックなどの車両のステアリング装置でステアリング感覚を変化させる方法であって、ステアリング装置が、ステアリング・コラムを含み、ステアリング・コラムを介して、回転運動が、ステアリング・ホイールなどの操作手段とステアリング装置のサーボ装置との間で伝達される。この方法は、特に、上記の回転運動に関するステアリング・コラムの回転抵抗を変化させるステップ、及び/又は、上記の回転運動に関するステアリング・コラムの慣性モーメントを変化させるステップ、並びに、車両の運転者などのオペレータによる手動及び/又は自動で上記変化を作動させるステップを含むことを特徴とする。また、本発明は、ステアリング感覚を変化させるための装置、コンピュータ・プログラム、コンピュータ及び車両に関する。  (もっと読む)
(もっと読む)
駆動制御システム
本発明は、自動車、ボート、航空機など、またはビデオゲームのコンソール、シミュレーション装置などの運転シミュレータの車両駆動制御システム(1)に関し、ステアリングホイール、舵などの方向制御デバイス(2)を備え、指向手段(21′、22′、21″、22″)を備え、前記システム(1)は、前記方向制御デバイス(2)の位置を検出するための手段(6)と、フレームを有し、前記方向制御デバイス(2)の動作に対する抵抗を調節するのに適している受動的アクチュエータおよび調節手段(8′、8″、8a、8a′、8b、8b′)を備える前記方向制御デバイス(2)と機械的に連結する調節モジュール(7、7′、7″)と、前記指向手段(21′、22′、21″、22″)の位置を検出するための1つまたは複数のセンサー(27)と、前記検出手段(6)によって検出された前記方向制御デバイス(2)の位置に基づいて、前記受動的アクチュエータまたは調節手段(8′8″、8a、8a′、8b、8b′)による前記方向制御デバイス(2)の動作に対する抵抗を適切に較正し、前記指向手段および前記センサー(27)によって前記車両またはシミュレータの方向を制御する、少なくとも1つの中央制御装置(23)とを含むことを特徴とする。  (もっと読む)
(もっと読む)
車線維持支援システム
【課題】煩雑な操舵操作を招くことのない車線維持支援システムを提供すること。
【解決手段】本発明による車線維持支援システム1は、車両Cの前方を撮像する撮像手段10と、撮像手段10の撮像した前方の画像から車両Cの前方の車線中央に対する車両のオフセット距離及び偏向角と、車線中央の曲率を検出する検出手段8aと、オフセット距離及び偏向角と曲率に基づいて車両を車線中央に維持するように車両の操舵装置6を制御する操舵制御装置に操舵指令を出力する車線維持手段8bとを備えるとともに、操舵装置6が入力側の駆動軸2の入力側操舵角を出力側の駆動軸4の出力側操舵角で除したギア比を可変とする操舵角可変機構3を備え、検出手段8aが検出した曲率に基づいてギア比を変更するギア比変更手段8cを備えることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】泥棒に心理的な圧力をかけて盗難防止を図る着想を、電動パワーステアリング装置によって実現する。
【解決手段】車両の窃盗行為に伴う物理的な異常を検出した場合に、電動パワーステアリング装置用のECU12の制御装置15は、必要な操舵補助力を生じさせるためにモータ8のU,V,W相に順次供給すべき電流値のうち、W相の電流値を周期的に0として、3相の電流値に周期的な乱れを起こさせる。この周期の逆数が可聴域の周波数であれば、モータ8を発振源とする音を発生させことができる。
(もっと読む)
車両制御装置
【課題】コストアップを招くことなく、ロードキャンバによる意図しない車両の移動を防止することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、前方情報を取得する前方情報取得手段2と、前方情報に基づいて自車両を車線中央に維持するように操舵装置4の目標操舵トルクを演算する目標操舵トルク制御手段5と、操舵装置4に備えられて実操舵角を検出する実操舵角検出手段と、前方情報から求めた操舵方向と実操舵角の変位方向が、異ならない場合に今回の実操舵角を基準操舵角とし、異なる場合に、一制御周期分前回の基準操舵角を基準操舵角として、基準操舵角と実操舵角の偏差に基づいて外乱抑制トルクを演算する外乱抑制トルク演算手段5と、目標操舵トルクに外乱抑制トルクを加算する加算手段5を備えることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】補助電源を使用する電動パワーステアリング装置において、補助電源のコスト増大を抑制しつつ、充放電閾値を適切に設定する。
【解決手段】操舵補助に必要な電源出力が所定の充放電閾値以下のときは主電源のみで電力を負担するとともに補助電源は充電可能な状態とし、当該充放電閾値を超えるときは補助電源も使用して主電源と電力の分担を行う電動パワーステアリング装置において、充放電閾値を変化させたときの、補助電源に必要なエネルギーの特性カーブに基づいて、充放電閾値によるエネルギーの2階微分値がピーク値となるときの値より大きい充放電閾値を制御回路に設定する。
(もっと読む)
電動パワーステアリング装置
【課題】補助電源の充電能力に優れた電動パワーステアリング装置を提供する。
【解決手段】主電源7の電圧をVB、補助電源17の電圧をVCとするとき、操向車輪が自ら元に戻ろうとする力によってモータ4のロータ4rが回される、という現象が生じて、モータ4の発電する電圧VGが、VG>VB+VCの関係を満たす場合がある。そこで、この場合に、制御回路23及びゲート駆動回路14は、MOS−FET11及び12を共にオフの状態として、MOS−FET12の寄生ダイオード12dを介して電圧VGにより補助電源17が充電されるようにする。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータ駆動回路に異常が生じた際に、大型化およびコストアップを招くことなく操舵アシストを継続することが可能な電動パワーステアリング装置の制御装置を提供する。
【解決手段】モータを駆動する電流の制御値を生成する中央処理装置(CPU)11と、電流の制御値に基づくPWM信号からモータ2の駆動電流を生成する主モータ駆動回路13および副モータ駆動回路14と、主モータ駆動回路13を構成する駆動素子のMOSFETQ31〜Q36を駆動するプリドライバIC12と、主モータ駆動回路13の異常を検出する異常検出部15と、モータ電流の経路を切り換える切換スイッチ16を備えて構成する。異常検出部15によって主モータ駆動回路13の異常が検出されると、CPU11から直接副モータ駆動回路14にPWM信号を送ると共に、切換スイッチ16を切り換えて副モータ駆動回路14とモータ2を接続し、副モータ駆動回路14で生成した比較的小さなモータ電流でモータ2を駆動する。
(もっと読む)
電動パワーステアリング制御装置
【課題】不揮発性メモリに格納されたデータの整合性及び異常を、容易に且つ迅速に低コストで確認することのできる電動パワーステアリング制御装置を提供する。
【解決手段】不揮発性メモリ109に格納されている制御データは、ROM114に格納されている制御プログラムに整合する制御データか否かを判定するための識別値が予め付加されており、且つ、ECU1内のCPU114は、制御プログラムと制御データとを読み込む際、これら制御プログラムと制御データとに基づいて識別値を演算すると共に、この演算された識別値と、制御データに予め付加された識別値と、を比較して、前記制御プログラムと前記制御データとの整合性を判定する。
(もっと読む)
電動パワーステアリング装置
【課題】逆入力応力の印加により生ずる操舵系の振動を効果的に抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、操舵系の状態を示す信号としてのピニオン角から、転舵輪に対する逆入力応力の印加により生ずる操舵系の振動に対応する周波数成分を抽出し、その実効値としてパワースペクトルSpを演算する(ステップ201)。そして、このパワースペクトルSpが所定の閾値Sth以上である場合(Sp≧Sth、ステップ203:YES)には、そのモータ制御を、モータの回転を規制する回生ブレーキ制御に切り替える(モータ回転規制制御、ステップ204)。
(もっと読む)
電動パワーステアリング装置
【課題】容易且つ高精度にオープン制御の外乱補正を行うことのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン17は、所定の電圧方程式に基づくオープン制御を実行することによりモータ制御信号を生成する。また、マイコン17は、フィードバック演算手段としての電流F/B演算部30d,30qを有し、検出される実電流値に基づく電流フィードバック演算を実行する。そして、補正手段としてのマイコン17(オープン制御演算部24)は、当該電流フィードバック演算の結果に基づいて、上記オープン制御に用いられる電圧方程式を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置の制御系に不具合が発生した場合に、不具合の発生した箇所を判定すること。
【解決手段】電動パワーステアリング装置は、EPS制御装置50によって制御される。EPS制御装置50は、電動機相電流検出回路62、63から検出した電流が異常であると判定した場合には、電動機相電流検出回路62、63へ電流が流れない状態とする。そして、電動機相電流検出回路62、63へ電流が流れない状態にもかかわらず、電動機相電流検出回路62、63から電流を検出した場合には電動機相電流検出回路62、63の異常であると確定される。一方、電動機相電流検出回路62、63へ電流が流れない状態で、電動機相電流検出回路62、63から電流を検出しない場合には、プリドライバ60や電動機駆動回路61の異常であると確定される。
(もっと読む)
パワーステアリング装置
【課題】自動操舵制御を行うことが可能なパワーステアリング装置を提供する。
【解決手段】入力軸8に穿設された駆動ピン挿入穴8bに駆動ピン32を圧入するとともに、その入力軸8にトーションバー9を介して連結された出力軸7にはプランジャ収容穴7cが形成されていて、そのプランジャ挿入穴7cにプランジャ33を進退移動可能に配置する。駆動ピン32はその一端が入力軸8からその径方向外側に突出している一方で、他端がトーションバー9に突き当てられていて、プランジャ33が駆動ピン32を押圧することで、両者の傾斜面接触をもって入力軸8にトルクを付与して自動操舵制御を行う。
(もっと読む)
ステアリング装置
【課題】簡素な構成で可変ギア比制御を行なえるようにした、ステアリング装置を提供する。
【解決手段】ステアリングホイール5と操舵機構6との間に動力伝達可能にそなえられ、ねじる際に生じる抵抗がバネ力となるトーションバー3と、操舵機構6を駆動する電動モータ7と、ステアリングホイール5の操舵角を検出する第1の操舵角検出手段1と、操舵機構6の実操舵角を検出する第2の操舵角検出手段2とを備えたステアリング装置であって、第1の操舵角検出手段1で検出された操舵角に応じた目標操舵角を設定する目標操舵角設定手段10と、第2の操舵角検出手段2で検出される実操舵角が目標操舵角に一致するように電動モータを制御する実操舵角制御手段12とを備えて構成する。
(もっと読む)
1 - 20 / 31
[ Back to top ]