
Fターム[3D233CA19]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023) | 操舵速度、操舵加速度 (422)
Fターム[3D233CA19]に分類される特許
1 - 20 / 422
電動パワーステアリング制御装置
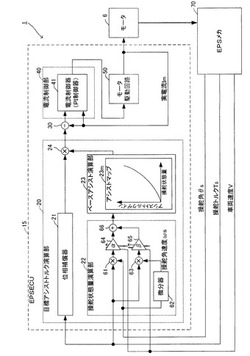
【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車

【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、トルクセンサ31により検出した操舵トルクに基づき基準補助トルクを算出する。ECU40は、算出した基準補助トルクをラック6の位置に基づき補正することで補正補助トルクを算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準補助トルクの値がより小さくなるよう補正することで補正補助トルクを算出する。ECU40は、ラック6の位置に基づき前記基準補助トルクまたは前記補正補助トルクのいずれかを補助トルクとして決定する。ECU40は、決定した補助トルクに基づきアクチュエータ52の駆動を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】モータの回転角速度に基づいて精確にモータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】第1の時刻t1のとき操舵角速度ωsが第1条件〜第3条件を満たす。このとき、第1逆起電圧定数Ke1が算出される。第2の時刻t2のとき操舵角速度ωsが第1条件〜第3条件を満たす。このとき、第2推定誘起電圧EX2が算出される。操舵角速度ωsと推定誘起電圧EXとに基づいて逆起電圧定数Keを算出する。そして、モータ電流Imとモータ電圧Vmと逆起電圧定数Keとモータ抵抗Rmとに基づいてモータの回転角速度を推定回転角速度ωmaとして算出する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドル切り込み状態時における、快適な操舵フィーリングを得ることのできる電動パワーステアリング装置を提供することにある。
【解決手段】操舵トルクが所定値以上であり、かつ操舵トルクの微分値が0より大きい場合か、又は、操舵トルクが所定値以下であり、かつ操舵トルクの微分値が0より小さい場合には、切り込み状態と判定し、切り込み状態と判定した条件以外の場合には、切り戻し状態と判定する。そして、切り込み状態と判定した場合のみ、ダンパー補償制御、及び慣性補償制御を有効となるようにする。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
電動パワーステアリングの制御装置
【課題】モータと電動パワーステアリングの制御装置を隣接配置する構造で小型の電動パワーステアリング装置を提供する。
【解決手段】円筒形状を有する車載用電動パワーステアリング用のモータ11と隣接して配置され、モータを駆動するための交流電流を発生する制御装置であって、制御装置の筐体4は、円筒形状と嵌合する突起部形状4dと、モータと制御装置を隣接して固定するためのねじ固定部と、を有し、ねじ固定部は突起部形状とモータとの隙間に円筒形状の中心軸と並行にねじを挿入するように配置されている。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ドライバが、広い運転領域で操舵輪のグリップ状況を舵力インフォメーションとして舵力で感じとりながら安心して適切な運転を行う。
【解決手段】操舵制御部は、ハンドル角と車速に応じて車両の運動モデルに基づき目標横加速度Gytを算出し、実際の横加速度と目標横加速度Gytとの偏差(横加速度偏差)ΔGyを算出し、操舵速度の絶対値と車速とに応じて現在の操舵状態がドライバが舵力をフィードバックして操舵している状態か否か判定し、ドライバが舵力をフィードバックして操舵している状態と判定し、且つ、横加速度偏差ΔGyが予め設定しておいた設定値CG以上の場合は、車速と操舵トルクを基に設定する基本アシストトルクTbを増加する方向に補正して、この補正した基本アシストトルクTbをアシストトルクTaとしてモータ駆動部に出力する。
(もっと読む)
操舵装置
【課題】運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の環境を特定する特定手段と、特定された環境に基づいて、操舵ハンドルに発生させる操舵減衰力を制御する制御手段とを備える。ダンピング制御部130は、基本ダンピング制御部131によって設定した基本ダンピングトルクTbと、調整ゲイン設定部1341によって道幅判定値に応じて設定した調整ゲインGaとの積をダンピングトルクとして設定する。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
電動パワーステアリング装置
【課題】 衝突回避時等における操舵性や安定性の向上等を実現した電動パワーステアリング装置を提供する。
【解決手段】 ステップS6で衝突回避支援装置25から緊急時フラグFemgが入力しているか否か(Femg=1であるか否か)を判定し、この判定がNoであればステップS7で通常時操舵角速度差DTωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定し、YesであればステップS8で緊急時操舵角速度差DMωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定する。
(もっと読む)
1 - 20 / 422
[ Back to top ]