
Fターム[3D244AC35]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 積載荷重 (14)
Fターム[3D244AC35]に分類される特許
1 - 14 / 14
車両の運転支援制御装置
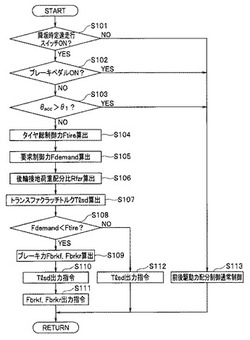
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
車両の制御装置

【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
他車認識システム
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
車間距離制御装置
【課題】自車両が被牽引車両を牽引する場合に安全な制動距離を確保することができると共に、走行安定性を高めることができる車間距離制御装置を提供すること。
【解決手段】自車両と先行車両との車間距離を制御する車間距離制御装置10において、自車両が被牽引車両を牽引しているか否かを判定する判定手段12と、自車両と先行車両との目標車間距離を判定手段12の判定結果に応じて決定する車間距離決定手段14と、自車両の目標加減速度を判定手段12の判定結果に応じて決定する加減速度決定手段16と、目標車間距離及び目標加減速度に基づいて自車両を制御する制御手段18とを備える。
(もっと読む)
車両およびその制御方法
【課題】走行用の駆動力を滑らかに変化させる範囲をより適正なものとすると共に巡航走行の際に運転者に違和感を与えるのを抑制する。
【解決手段】車重Mが大きいほど大きくなる傾向で車速Vが大きいほど大きくなる傾向の巡航走行用アクセル開度Accjに基づいて巡航走行用範囲Rを設定し(S120)、アクセル開度Accが巡航走行用範囲R内のときには要求トルクTr*に対して緩変化処理を施して実行トルクT*を設定すると共に(S130,S150)、バッテリの入出力制限Win,Woutの範囲内で実行トルクT*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S160〜S240)。これにより、巡航走行用範囲Rをより適正に設定することができると共にアクセル開度Accが巡航走行用範囲Rのときに運転者に違和感を与えるのを抑制することができる。
(もっと読む)
燃料噴射量制御システム
【課題】走行燃費向上に繋がる燃料噴射量制御と、車両の状態に対応した加速度の実現とを両立することが出来る燃料噴射量制御システムの提供。
【解決手段】オートクルーズスイッチ(9)と、車速を計測する装置(車速センサ7)と、トランスミッションのギヤ段を検出する装置(20)と、アクセル開度を計測する装置(アクセル開度センサ30)と、エンジン回転速度を計測する装置(40)と、計測された車速、トランスミッションのギヤ段、アクセル開度、エンジン回転速度、オートクルーズスイッチの操作内容が入力される制御装置(10)とを有し、該制御装置(10)は、車両の状態(例えば車速、車両積載状態、走行中の道路の勾配)に対応して噴射量制限の作動と解除を決定する機能を有する。
(もっと読む)
車両の走行制御装置
【課題】内燃機関の駆動力の余裕度を精度良く求めることが可能な車両の走行制御装置を提供する。
【解決手段】車両の走行制御装置10は、車両が設定速度で走行するように内燃機関の駆動力を制御する走行制御装置10において、内燃機関の出力軸回転数およびスロットル開度に基づいて内燃機関の駆動力を算出する駆動力演算手段12と、駆動力算出手段により算出された駆動力と、出力軸回転数に対応する最大駆動力とに基づいて、内燃機関が追加して出力し得る駆動力を示す駆動力余裕度を算出する駆動力余裕度演算手段13と、を備える。
(もっと読む)
車間自動制御装置
【課題】 本発明は、安全な車間距離を自動的に確保するための車間自動制御装置に関し、車両の積載重量を荷重計により測定することなく積載重量を推定し適正車間の制御を行うことを目的とする。
【解決手段】 車両に積載される荷物の積み下ろし情報を入力する入力手段と、前記積み下ろし情報に基づいて現在の車両の重量を求める重量算出手段と、前記重量算出手段で求められた前記車両の重量に基づいて前記車両の速度を適正車間になるように制御する制御手段とを有することを特徴とする。
(もっと読む)
運転操作評価装置
【課題】車両の走行環境を考慮して運転者の運転操作を適正に評価することが可能な運転操作評価装置を提供すること。
【解決手段】エネルギー消費抑制の観点から許容される許容運転操作範囲を設定し、運転者の運転操作が許容運転操作範囲を逸脱した程度に基づいて運転者の運転操作を評価する、運転操作評価装置であって、車両の走行環境を検出する走行環境検出手段と、走行環境検出手段により検出された車両の走行環境に基づいて、許容運転操作範囲を設定する、許容運転操作範囲設定手段82と、運転者の運転操作を検出する運転操作検出手段と、転操作検出手段により検出された運転者の運転操作と、許容運転操作範囲設定手段により設定された前記許容運転操作範囲と、を比較して評価する評価手段84と、を備えることを特徴とする。
(もっと読む)
車両の定速走行制御システム
【課題】 定速走行制御状態で走行抵抗の変動が生じるルートを走行する際、一定速走行機能を損なうことなく、エネルギー消費率の向上と、トルク変動ショックの抑制と、を達成することができる車両の定速走行制御システムを提供すること。
【解決手段】定速走行制御手段を備えた車両の定速走行制御システムにおいて、自車の走行ルート上での走行抵抗の変動に対し、出力トルク補正制御を行わなくても車速が許容車速内に収まると推定されるトルク制御中断領域を予め設定するトルク制御中断領域設定手段を設け、前記定速走行制御手段は、定速走行制御中、自車が設定されたトルク制御中断領域内に入ると、動力源の出力トルク補正制御による定速走行制御を中断し、自車が設定されたトルク制御中断領域を抜けると、動力源の出力トルク補正制御による定速走行制御を再開する手段とした。
(もっと読む)
車両制御装置
【課題】車両の重量が変化する場合であれ、車両の走行速度を目標速度により適切にフィードバック制御することのできる車両制御装置を提供する。
【解決手段】目標速度算出部B2では、車両の走行速度の目標値を算出する。加速度算出部B4では、目標速度と検出される車速とに基づき、加速度の目標値を算出する。走行抵抗補償部B6では、車両の走行抵抗を補償する補償量を算出する。噴射量算出部B10では、加速度の目標値と補償量とに基づき、噴射量を算出する。こうして算出される噴射量は、車両の重量に応じて補正される。
(もっと読む)
車間距離制御方法及びそのシステム
【課題】先行車両との安全走行距離をより効果的に制御するための車間距離制御方法及びシステムを提供する。
【解決手段】本発明は、走行中の路面の最大摩擦係数を検出する段階;前記検出された最大摩擦係数及び走行速度に基づいて先行車両との最小安全距離を算出する段階;前記算出された最小安全距離に対応する基準安全指数を設定する段階;先行車両との相対距離に対応する現在の安全指数を算出する段階;及び前記現在の安全指数及び前記基準安全指数を比較して車間距離を制御する段階;を含むことを特徴とする。
(もっと読む)
重作業用乗り物用の適応クルーズコントロール
乗り物の速度を制御する適応クルーズコントロール装置及び方法が開示される。装置は、一般に、選択されている速度未満の乗り物の制限速度に関連しているトルク指令を求める制御装置を有している。方法は、一般に、乗り物と乗り物の経路内で検出された物体との間の距離を求めることと、選択されている速度未満の制限速度に関連しているトルク指令を少なくとも距離から求めることと、トルク指令を乗り物のエンジン制御装置に送信することとを有している。  (もっと読む)
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。また、積載貨物や乗客の重量に応じて制動パターンを変更する。
(もっと読む)
1 - 14 / 14
[ Back to top ]