
Fターム[3D246BA02]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ型式 (2,987) | 液圧式ブレーキ (2,083)
Fターム[3D246BA02]に分類される特許
1,801 - 1,820 / 2,083
車両の制御装置

【課題】 駆動力及び制動力を使用した定速走行制御が加速操作に依らずに終了しても、例えば、登坂中の車両が加速せず、運転者に違和感を与えることを回避することができる車両の制御装置を提供すること。
【解決手段】 電子制御装置50は、制御スイッチ46Aが操作されること等により加速操作及び制動操作に依らずに定速走行制御を終了する時点(特定制御終了時点)以降にて、車両駆動力を特定制御終了時点の加速操作量に応じた力(0)へ減少させる。一方、電子制御装置は、駆動力と同方向ならば正の(反対方向ならば負の)値をとる力であり駆動力の大きさから制動力の大きさを減じた値を大きさとして有する車両推進力の値が特定制御終了時点の車両推進力の値以下となるように油圧回路33を用いて制動油圧を制御することにより、車両制動力を特定制御終了時点の制動操作量に応じた力(0)へ変更する。
(もっと読む)
車線逸脱防止装置

【課題】運転者のステアリング操作が意図的であるか否かを正確に判断する。
【解決手段】左右輪の制動力差による進路修正に伴って、閾値θsを変更している。つまり、目標ヨーモーメントMsを発生させる際に(厳密には運転者の体重移動が発生する前に)、予想される運転者の体重移動に応じて、閾値θsを変更しておく。また、発生させるヨーモーメントMsが大きいほど、それだけ運転者の体が横方向に振られることになるので、Msが大きいほど、閾値θsを大きくする。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御の終了が運転者に違和感を与えないようにする。
【解決手段】車線逸脱防止装置は、走行車線に対して車両の逸脱傾向が高くなったと判定した場合、車両にヨーモーメントを付与することで走行車線に対して車両が逸脱するのを防止する車線逸脱防止制御を開始し(ステップS6、ステップS11)、車線逸脱防止制御中の車両状態が所定の車両状態になった場合に、車両に付与するヨーモーメントを零に戻すことで、該車線逸脱防止制御を解除しており(ステップS8)、ヨーモーメントを零に戻す際の、該ヨーモーメントの減少割合を、車両の横方向の走行状態及び旋回方向の走行状態のうちの少なくとも一の走行状態に応じたものにする(ステップS7、ステップS9)。
(もっと読む)
バーハンドル車両用ブレーキ液圧制御装置
【課題】バーハンドル車両用ブレーキ液圧制御装置の小型化を図る。
【解決手段】基体1の各流路構成部1F,1Rは、基体1の第一の側面(上面1d)に開口した入口ポート11および出口ポート12と、基体1の一面(前面1a)に開口した入口弁装着穴13および出口弁装着穴14と、基体1の第二の側面(側面1c)に開口したポンプ孔21と、ポンプ孔21の軸方向の垂直方向に延設され入口ポート11から入口弁装着穴13を介してポンプ孔21へと連通する第一流路31と、第一流路31と平行に延設され出口ポート12から出口弁装着穴14へと連通する第二流路32と、基体1の一面(前面1a)に開口したリザーバ穴15と、を備えている。
(もっと読む)
進行方向加速度推定装置、自動車、進行方向加速度推定方法および車両制御装置
【課題】車両の進行方向加速度をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値から、車体速vを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく路面傾斜角θを推定するため、路面傾斜角θをより高精度に推定できる。さらに、その路面傾斜角θを用いて、進行方向加速度αを算出するため、進行方向加速度αをより高精度に推定することができる。
(もっと読む)
差圧制御弁、差圧制御弁の検査方法、差圧制御弁の調整方法、及び車両用ブレーキ装置
【課題】可動子の移動に伴う吸引力の変化を抑制して、高精度の圧力制御を行なうことができる差圧制御弁及び車両用ブレーキ装置を提供すること。
【解決手段】差圧制御弁1は、ソレノイド2によって駆動されるプランジャ3と、プランジャ3を摺動可能に保持するスリーブ4と、プランジャ3の移動に伴って移動する制御ピストン6と、制御ピストン6を摺動可能に保持するガイド7とを備えている。また、磁気ショート構造として、プランジャ3の下端面3aには、制御ピストン6を押圧可能な円柱状の凸部21が設けられ、ガイド7の上端面7aには、凸部21と嵌合可能な円柱状に凹部22が設けられている。ソレノイド2の非通電時には、凸部21と凹部22とは、その平行な側面にて一部が重なり合っており、ソレノイド2の通電時には、プランジャ3は矢印A方向に移動して、制御ピストン6を同方向に移動させる。
(もっと読む)
車両のアンチロックブレーキ制御装置
【課題】走行路面の摩擦係数が低摩擦係数から高摩擦係数に急激に変化したことを簡単な演算内容でかつ速やかに判断して、制動距離の短縮を図る。
【解決手段】摩擦係数急変化判断手段61は、低摩擦係数であるのに基づいて全車輪で緩増加モードを選択している状態で、少なくとも1つの車輪の緩増加モードの経過時間が所定時間以上であり、車両の減速度が判定用の閾値を減速側に超え、しかも前記各車輪対応車体速度推定手段55A〜55Dでそれぞれ推定された車輪対応車体速度の最大値および最小値の差が基準値未満であるときに摩擦係数が低摩擦係数から高摩擦係数に急激に変化したと判断し、制御モード設定手段62A〜62Dは、緩増加モードを選択している状態で、走行路面の摩擦係数が低摩擦係数から高摩擦係数に急激に変化したと摩擦係数急変化判断手段61が判断するのに応じて制御モードを緩増加モードから急増加モードに切換える。
(もっと読む)
車線逸脱防止装置
【課題】運転者に違和感を与えないタイミングで車線逸脱防止制御を制限する。
【解決手段】車線逸脱防止装置は、走行車線に対して車両の逸脱傾向が高くなったと判定した場合、走行車線に対して車両が逸脱するのを防止する車線逸脱防止制御を行うものであり(ステップS5、ステップS10)、車両が走行車線に対し、該走行車線の外側方向になすヨー角を取得し(ステップS3)、その取得したヨー角が、所定のしきい値以上になった場合、車線逸脱防止制御を制限する(ステップS7)。そして、所定のしきい値を、車速及び走行車線の車線幅のうちの少なくとも一方に応じて補正する(ステップS6)。
(もっと読む)
電磁弁
本発明は、磁石構造群(13)と、磁極心(23,43)を備えた弁カートリッジ(22,42)と、前記磁極心(23,43)に接続された弁挿入体(25,45)と、該弁挿入体(25,45)内で閉鎖位置と開放位置との間で軸方向に可動にガイドされ、かつ閉鎖部材(28,48)に連結された可動子(24,44)と、前記弁挿入体(25,45)に接続され、かつ少なくとも1つの第1の貫流開口(31,51)と第2の貫流開口(32,52)との間に配置された主弁座(30,50)を備えた弁体(29,49)とを有しており、軸方向に可動な前記可動子(24,44)は、前記磁石構造群(13)に給電されると、弁挿入体(25,45)内に生ぜしめられた磁力(FMagnet)によってリターンスプリング(26,46)のばね力(FFeder)に抗して、かつ流体力(FHydraulik)に抗して、前記磁極心(23,43)に向かう方向に移動せしめられ、それによって、前記閉鎖部材(28,48)が前記主弁座(30,50)から持ち上げられて、少なくとも1つの第1の貫流開口(31,51)と第2の貫流開口(32,52)との間での流体貫流が可能となり、また、軸方向で可動な前記可動子(24,44)が前記リターンスプリング(26,46)のばね力(FFeder)によって前記弁挿入体(25,45)内で前記磁極心(23,43)から離れる方向に移動せしめられて、前記閉鎖部材(28,48)が前記主弁座(30,50)内に気密に押し付けられ、前記少なくとも1つの第1の貫流開口(31,51)と前記第2の貫流開口(32,52)との間での流体貫流が中断されるようになっている形式のものに関する。本発明によれば、前記可動子(24,44)のストロークに亘る、前記磁力(FMagnet)の特性曲線、前記ばね力(FFeder)の特性曲線及び前記流体力(FHydraulik)の特性曲線が、前記可動子(24,44)及び前記閉鎖部材(28,48)の閉鎖位置と開放位置との間における、負のフルパワー特性曲線勾配との力の釣り合い点を表す、少なくとも1つの広く安定した作業点が調節され得るように、組み合わされている。  (もっと読む)
(もっと読む)
車線逸脱防止装置
【課題】制御量補償をする値自体がばらつく場合でも、ヨーモーメントが過大になってしまうのを防止する。
【解決手段】車線逸脱防止装置は、車両状態を基にヨーモーメントを補償する補償値を算出し(ステップS9)、その算出した補償値により補償されたヨーモーメントが車両に付与されるように車線逸脱防止制御を行うものであり(ステップS13)、補償値のばらつき度合いを推定し(ステップS10)、推定したばらつき度合いが高くなるほど、補償値を制限する度合いを高くする(ステップS11)。
(もっと読む)
スリップ率推定装置、自動車、スリップ率推定方法および車両制御装置
【課題】車輪のスリップ率をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値(進行方向加速度)と各車輪の車輪速ωとを用いて、車輪のスリップ率λを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく高精度に路面傾斜角θを推定するため、その路面傾斜角θを用いて算出した進行方向加速度αから、より高精度にスリップ率を推定することができる。
(もっと読む)
車体速推定装置、自動車、車体速推定方法および車両制御装置
【課題】車体速をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値から、車体速vを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく路面傾斜角θを推定するため、路面傾斜角θをより高精度に推定できる。さらに、その路面傾斜角θを用いて算出した進行方向加速度αから、車体速vを算出するため、車体速vをより高精度に推定することができる。
(もっと読む)
車両ブレーキ装置におけるブレーキ圧を制御するための液圧ユニット
本発明は、車両ブレーキ装置におけるブレーキ圧を制御するための液圧ユニット(10)に関する。このような形式の液圧ユニットは、アンチロックブレーキコントロール、トラクションコントロール、走行安定化コントロールを行う車両ブレーキシステムの主要構成部材である。本発明は、液圧ユニットのケーシングブロック(50´)における必要な切欠の特に有利な配置を提案している。このような配置に基づき、ケーシングブロック(50´)の寸法を減じることができ、減じられた重量で、製造技術的に簡単に製造することができる。このために本発明によれば、マスタブレーキシリンダ(10)の1つの接続部(74,76)から1つのポンプエレメントの吸込側への第2の圧力媒体接続部が、切替弁(USV;40)の弁収容部(104,106)を通って案内されている。 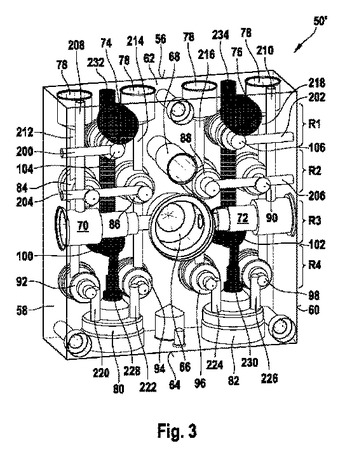 (もっと読む)
(もっと読む)
車輌の走行制御装置
【課題】乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御する。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
(もっと読む)
二輪車用ブレーキ制御装置
【課題】 簡略な構成でアンチロックブレーキ制御を達成しうる二輪車用ブレーキ制御装置を提供する。
【解決手段】 後輪ホイルシリンダは、第1後輪ホイルシリンダと第2後輪ホイルシリンダから構成され、第1後輪ホイルシリンダは後輪マスタシリンダと接続し、第2後輪ホイルシリンダは前記前輪マスタシリンダと接続するようにした二輪車用ブレーキ制御装置において、前輪ホイルシリンダに接続し、この前輪ホイルシリンダの増減圧を行うブースタと、ブースタを駆動するモータと、前輪マスタシリンダと前輪ホイルシリンダとを連通または遮断する電磁弁と、モータおよび電磁弁を制御するコントロールユニットとを備えることとした。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車載用アクチュエータシステム
【課題】運転者に違和感を覚えさせることなく、操作性を悪化させたりすることなく、出力機構のアクチュエータが制御できないような失陥が発生しても、電気的・機械的増幅なしの人力により車両運動を操作する必要をなくして、アクチュエータの小型化と軽量化を図ること。
【解決手段】第一可動部を動作させる第一アクチュエータと、第二可動部を動作させるものであって前記第一アクチュエータとは独立して制御される第二アクチュエータと、前記第一可動部と前記第一可動部の動作が弾性体を介して前記第二可動部の動作に作用すると共に前記第二可動部の動作が弾性体を介して前記第一可動部の動作に作用するように構成された機構部と、前記第一可動部又は前記第二可動部から前記弾性体を介して他方の可動部に伝達される力及び/又は位置の変化を、相殺、抑制又は増幅するように他方のアクチュエータを制御する制御装置と、を有する車載用アクチュエータシステム。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】ドライバがブレーキアシスト制御を解除するという意思がないにも拘わらず、ブレーキペダル踏み込み量の変化に伴って目標減速度が得られなくなることを防止する。
【解決手段】ブレーキアシスト制御中に、ドライバがブレーキアシスト制御を解除するという意思がなければ、W/C圧を目標減速度相当圧P1に一定に維持する。具体的には、踏み戻し判定やブレーキオフ状態、もしくは、踏み増し判定などが為されなければ、M/C圧の変動分をキャンセルできるように嵩上げ量Prを設定することで、ブレーキアシスト制御中はW/C圧を目標減速度相当圧P1にする。これにより、ドライバがブレーキアシスト制御を解除するという意思がないにも拘わらず、ブレーキペダル踏み込み量の変化に伴って目標減速度が得られなくなることを防止することができる。
(もっと読む)
車両用走行支援装置
【課題】 障害物検出手段としてレーダと画像認識に加え、運転者の脇見検出手段を用いて走行支援を行う車両用走行支援装置において、各検出手段の検出結果に応じた適切な支援制御を設定した車両用走行支援装置を提供する。
【解決手段】 レーダ(ミリ波)による障害物検出結果と、画像認識による障害物検出結果を照合して、両者で検出した場合とそれぞれのみで検出した場合に分岐する。これに脇見運転の判断を加味して、分岐を行い、分岐結果に応じて走行支援制御の開始条件を変更することで、運転者の注意に応じた支援制御を実行する。
(もっと読む)
ブレーキ制御装置
【課題】制御弁に異物が詰まっている状況に応じて異物詰まりを解消することが可能な技術を提供する。
【解決手段】車輪に制動力を付与するブレーキ制御装置において、ブレーキフルードを加圧するマスタシリンダユニット10と、ブレーキフルードの供給を受けて車輪に制動力を付与するホイールシリンダ23と、マスタシリンダユニット10とホイールシリンダ23とを連通させ、マスタシリンダユニット10におけるブレーキフルードの圧力をホイールシリンダ23へと伝達する液圧アクチュエータ40と、液圧アクチュエータ40内のブレーキフルードの流れを制御する制御弁と、制御弁に異物が詰まっている場合の異物の詰まり方向を判定するブレーキECU70と、異物が詰まっている場合に異物の詰まり方向と逆方向にブレーキフルードが流れるような差圧を発生させる差圧発生手段とを備える。
(もっと読む)
1,801 - 1,820 / 2,083
[ Back to top ]