
Fターム[3D246GC02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 低速走行時 (88)
Fターム[3D246GC02]の下位に属するFターム
Fターム[3D246GC02]に分類される特許
41 - 48 / 48
車両の電動モータ出力制御装置
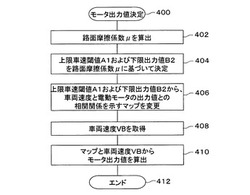
【課題】車両の電動モータ出力制御装置において、車速が低速である場合に電動モータの出力を低減して静粛性を向上させる。
【解決手段】車両の電動モータ出力制御装置は、車両速度取得手段(ステップ408)によって取得した車両の速度が、運転者が電動モータの作動音を識別可能な速度の場合、モータ駆動制御手段(ステップ402〜410、314)が電動モータの出力を低下させる。これにより、車両速度(車速)が運転者が電動モータの作動音を識別可能な速度の場合、電動モータの回転数(出力)を適切かつ十分に低減することにより、静粛性を向上させることができる。
(もっと読む)
電気駆動式荷役車両の前後進切替装置

【課題】電気駆動式の荷役車両における前後進を短時間で切り替える。
【解決手段】走行を制御する走行コントローラ21に設けられた前後進制御部21aに、前後進切替レバーにより現在の走行方向と逆方向に走行方向が切り替えられた場合に、走行速度に対応する回生ブレーキの回生制動トルクを求め、この回生制動トルクを前後進切替時の全制動トルクに割り当て、この回生制動トルクのみでは全制動トルクが不足する場合に、回生制動トルクに補充する油圧ブレーキの機械制動トルクを求める制動制御部25と、全制動トルクまたは制動制御部25で求められた回生制動トルクに基づいて回生ブレーキを作動させる回生制動出力部27と、制動制御部25で求められた機械制動トルクに基づいて油圧ブレーキを作動させる機械制動出力部28とを具備した。
(もっと読む)
自動車の走行制御装置
【課題】
渋滞時の低速走行から高速走行まで、安全性と利便性を保ちながら、前方車両の走行に応じた走行制御を行う。
【解決手段】
本走行制御装置は、自車の周辺に存在する周辺物体を検出し、当該自車と当該周辺物体との相対速度を計測する周辺物体検出手段と、前記自車の速度を検出する速度検出手段と、前記自車の速度を制御する車速制御手段と、低速追従モード、及び、高速追従モードの走行モードと、前記高速追従モード時に、前記周辺物体検出手段が検出した物体の車速、及び、当該物体と前記自車との相対距離に基づいて、当該自車の目標車速を算出する算出手段と、前記目標車速が所定値より低い場合、前記低速追従モードへモードを切り替える切替手段を備える。
(もっと読む)
車輌用制動制御装置
【課題】 低摩擦・低速状態の制動フィーリングを向上させることのできる車輌用制動制御装置を提供すること。
【解決手段】 本発明の車輌用制動制御装置は、車輪に車輪制動力を付与して車輌を制動させる車輪制動力付与手段と、この車輪制動力を制御する車輪制動力制御手段とを有しており、車輪制動力制御手段は、路面状態が所定状態よりも低摩擦側にあり、かつ、車速が所定値よりも低い状態にある低摩擦および低速状態であると判定した場合には、駆動輪に付与する車輪制動力を、低摩擦・低速状態ではなかった場合に駆動輪に付与される車輪制動力よりも増大させることを特徴としている。
(もっと読む)
電気的ブレーキクランプ力精度を増大させるための方法及びシステム
電気航空機カーボンブレーキのクランプ力の精度を増大させるための方法及びシステムは、制動が指令されたなら、低ブレーキクランプ力指令に応答する低ブレーキクランプ力の範囲を有する第1対の電気ブレーキアクチュエータと、高ブレーキクランプ力指令に応答する高ブレーキクランプ力の範囲を有する、第2対の電気ブレーキアクチュエータと、を備える。第1対の電気ブレーキアクチュエータは、車輪制動が指令されたなら、最小残留制動力を付与するように作動され、第2対の電気ブレーキアクチュエータは、指令された制動力がブレーキクランプ力の高範囲内にあるときのみ作動される。  (もっと読む)
(もっと読む)
下り坂を運転する車両の制御システム
【課題】 傾斜が急な道路上で運転するときに、ブレーキ・ペダルを運転者が作動させているか否かには関係なく、追加の制動モーメントを調節する坂下り制御システムを提供する。
【解決手段】 自動車の制動機器における坂下り制御システムは、運転者の作動には関係なく、アンチ・ロッキング制御機能および制動機能の双方に合わせて設計されている電気制御可能サービス・ブレーキ・システムと、自動車の個々の車輪に対して発生し、坂下り制御によって制御するそれぞれの操作対象変数である、制動圧力または制動モーメントの個々の調節を可能にするブレーキ・アクチュエータと、自動車の動作状態に関する変数を直接的または間接的に検出し、ブレーキ・ペダルが作動されているか否かには関係なく、傾斜が急な道路上で運転するときに、追加の制動モーメントを調節する、電子制御および/または規制のために設けられている電子制御ユニットとを備えている。
(もっと読む)
衝突回避システムを備えた車両の制御方法及びこの方法を実行する装置
本発明は、衝突の可能性のある他の当事者(20)を感知する手段(11)と、制御ユニットに接続された、衝突の危険を評価する手段(12)とを有する、衝突回避システムを備えた車両(10)の制御方法に関する。本発明によれば、他の衝突当事者が側方方向の比較的近くに来た場合に、側方衝突を回避するための車両(10)の経路(15)を設定するよう、アクチュエータシステムが稼動される。本発明はまた、本発明による方法を制御する装置に関する。  (もっと読む)
(もっと読む)
自動車両用のブレーキシステムおよび制動方法
本発明は自動車用のブレーキシステムおよび制動方法に関する。本発明においては自動車用のブレーキシステムが、摩擦ブレーキとして構成されるホイールブレーキ(21、23、25、27)用のブレーキ操作装置を少なくとも有している。ブレーキシステムは、所定の低い走行速度以上での走行状態から停止状態へ、ないしは停止状態から所定の低い走行速度での走行状態へ、ブレーキをかけながら移行する際に、前記各ホイールブレーキを互いに時間をずらして作動させるか、またはこれらに互いに時間をずらして増大する作動力を作用させる、ないしは、前記各ホイールブレーキを互いに時間をずらして緩めるか、またはこれらに互いに時間をずらして低下する作動力を作用させるコントローラ(31)が備えられることを特徴とする。  (もっと読む)
(もっと読む)
41 - 48 / 48
[ Back to top ]