
Fターム[3D246GC05]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 低速走行時 (88) | 後退時 (15)
Fターム[3D246GC05]に分類される特許
1 - 15 / 15
車両の制駆動力制御装置及び制駆動力制御方法
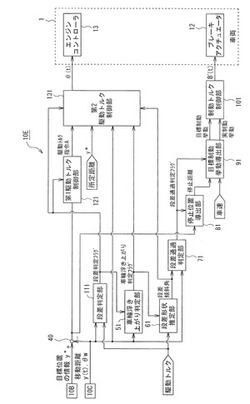
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
車両のブレーキ制御装置

【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧アクチュエータと、統合コントローラとを備え、統合コントローラは、停車時モータオフ制御部と、昇圧勾配制限部とを有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータを停止し、車両停止中、VDCモータの停止状態を維持したままとする。昇圧勾配制限部は、車両停止状態からの車速発生により停車時モータオフ制御を終了するとき、ドライバのブレーキペダルリリース前の目標減速度と、そのときのホイールシリンダ圧による実減速度と、の差異が大きくなるほど、VDCモータの作動再開に伴うホイールシリンダ圧の上昇勾配を小さくする。
(もっと読む)
車両の後退速度規制装置
【課題】車両後退中の車速(後退速度)を運転者によるブレーキ操作/解除に関連付けて適正に規制する。
【解決手段】運転者がブレーキ操作(ブレーキON)を行いながらシフトレンジをRレンジに切り換えた後、最初にブレーキ操作を解除(ブレーキOFF)した時点t1 で、後退速度の制限を開始して所定時間経過後に後退速度の制限を解除する。後退速度の制限中は、制限速度未満の領域では、ブレーキ操作やアクセル操作に応じて後退速度が変化し、制限速度以上の領域では、後退速度が制限速度に制限される。車両を後退させる動力源がエンジンの場合は、後退速度を制限する際に、エンジンの出力を制限せずに、ブレーキ作動制御、自動変速機の変速制御、クラッチのスリップ制御のいずれか1つ又は2つ以上により後退速度を制限する。
(もっと読む)
走行支援装置
【課題】ドライバーの要求により合致し、ドライバーの装置のシステムへの過信を防止することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12と、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、後退時に障害物Oaとの接触を防止するようにドライバーの操作によらずに車両11の速度の制限及び減速の減速制御又は停止制御を行ない、その後に減速制御等の操作量を小さくする。このため、車両11が障害物Oaに対して減速された後に、ドライバーがさらに障害物Oaに接近したい等の理由で車両11を加速させたい状況に対応することができ、いつまでも車両11が障害物Oaに対して減速させられて、ドライバーがシステムを過信することを防ぐことができる。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
制動装置
【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
ブレーキ操作時の操舵トルクの低減方法
【課題】車両が制動され且つ同時にかじ取りされる走行状況において、自動車の操舵トルクを低減する方法を提供する。前車輪に作用する操舵トルクを低減することである
【解決手段】車両が制動され且つ同時にかじ取りされる走行状況における自動車の操舵トルクの低減方法において、車両が制動され且つ同時にかじ取りされたかどうかが検査され、このような走行状況において後車輪におけるブレーキ力(PH)が自動的に上昇される。ブレーキ力を後車輪に移動することにより、前車輪は標準ブレーキ力分配に比較してより容易にかじ取り可能となる。これにより、電気式操舵力支援の最大所要出力は著しく低減される。
(もっと読む)
坂道発進補助装置
【課題】運転者の意図に沿ったより適切な坂道発進補助を実行することができる坂道発進補助装置を提供すること。
【解決手段】本発明による坂道発進補助装置1は、坂道発進補助制御を実行する制御手段7aと、マスターシリンダ圧を検出するマスターシリンダ圧検出手段16と、ステアリング角を検出するステアリング角検出手段9を含み、マスターシリンダ圧が所定圧より大きくステアリング角が所定角未満である場合に制御手段7aが坂道発進補助制御を開始することを特徴とする。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が後退動作中である場合、制御部4が、車両1の進行方向と接近車両が走行している道路の延在方向とがなす角度に応じて制動制御作動距離を設定する。これにより、車両1後方に接近車両が通過可能なスペースがなく、運転者が後退操作を早く終了させることを望んでいる可能性が高いシーンでは遅いタイミングで制動制御が行われるようになるので、制動制御に対して運転者が感じる煩わしさや違和感を低減させることができる。
(もっと読む)
車両制御装置
【課題】運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止する。
【解決手段】制御部4が、車両1よりも障害物側に設定された目標停止位置まで後退して停止する後退制御処理を、車両1から障害物までの距離が最終目標停止距離以下となるまで繰り返し実行することにより、障害物に対し車両1を段階的に後退させる。これにより、従来の車両制御装置のように、運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止できる。
(もっと読む)
車両用制動制御装置
【課題】障害物検知センサの特性に応じて適切な制動制御を行う車両用制動制御装置を提供することを目的とする。
【解決手段】当該車両付近の障害物を検知するに際して、前記障害物との間の距離が所定の距離値以上の場合には前記障害物までの距離値を測定し、前記距離が前記所定の距離値以下では前記障害物が存在するか否かのみを検知する障害物検知手段と、当該車両の移動量を測定する移動量測定手段と、前記障害物検知手段により前記障害物が所定の距離値以下に存在すると検知され、且つ、前記移動量測定手段により測定された当該車両の移動量が所定の移動距離値以上になったとき、当該車両を制動停止させる制動制御手段とを有することを特徴とする。
(もっと読む)
駐車支援装置
【課題】良好な駐車精度を保ちながら効率よく駐車動作を完了できる駐車支援装置を提供することを目的とする。
【解決手段】駐車支援装置1は、駐車目標位置に車両2を移動するための駐車経路40において運転者による操舵を必要とする場合に、運転者が前記操舵をする際に速度調節手段107により車両2の速度調節を行う。該速度調節は、前記操舵が行われる際に駐車経路40に略一致した状態を保持して車両2を走行させる目的で行われる。
(もっと読む)
自動車の走行方向を検出するための方法
本発明は、事故回避保護システムを有する車両の走行方向を検出するための方法であって、次のステップ、
a)車両方向の車両の前の対象物を検出するステップと、
b)相互の相対位置に基づき車両と対象物が接触する可能性を算出するステップと、
c)対象物が接触する可能性に関する算出結果に基づき運転者によらない制動及び/又は操舵行程を作動するステップとを含む方法に関する。
保護システムの誤った作動を回避するために、本発明に従って、別のステップ、すなわち、
e)予防的に作用する保護システム114又はこの予防的に作用する保護システム114と結合された安全装置116を有する車両の走行方向を算出するステップ、及び後退走行が検出されたときに、運転者によらない制動及び/又は操舵行程を阻止又は中断するステップが提供される。 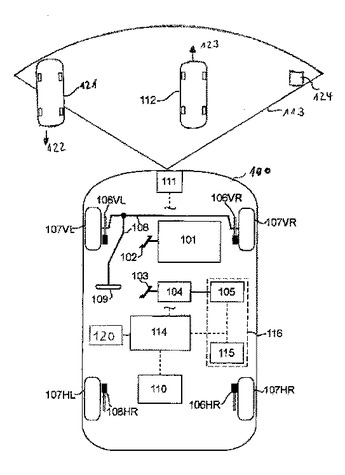 (もっと読む)
(もっと読む)
ブレーキコントロールシステム
車両用のブレーキ作動不能化装置は、車両の方向を示す信号を受信する為の電子制御ユニット(ECU)を含む。特にトラックが斜面をバックしながら下っているとき、車両の方向に応じて、車両の速度に応じて、及びブレーキ要求圧に応じて操舵軸と関連したブレーキを作動不能にする為の制御デバイスがECUと連通する。 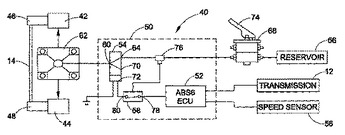 (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]