
Fターム[3D246GC02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 低速走行時 (88)
Fターム[3D246GC02]の下位に属するFターム
Fターム[3D246GC02]に分類される特許
21 - 40 / 48
制動制御装置

【課題】停止後に停止状態を保持する制動制御と、停止後に停止状態を解除する制動制御とを協働して実施できる制動制御装置を提供する。
【解決手段】制動制御装置1は、ECU2に第1制動制御部9と、第2制動制御部10とを備えている。第1制御部9は、車両Mの車速が車速下限値以上のときに、車両Mと対象物との衝突予測を行い、衝突が予測されると、車両Mの制動制御を実施し、制動制御の開始から所定時間経過後に制動制御を解除する。第2制動制御部10は、車両Mの車速が車速上限値以下であるときに、車両Mと対象物との衝突予測を行い、衝突が予測されると、車両Mの停止状態を保持するように車両Mの制動制御を実施する。また、第2制動制御部10は、第1制動制御部9により制動制御が実施された場合に、車速上限値及び衝突予測閾値回数を変更する。
(もっと読む)
車両走行制御方法
【課題】
車両減速時における車両運動エネルギーの効果的・効率的活用。
【解決手段】
車両現在位置から車両停止地点等の目標地点までの走行距離、現時点の車両走行速度、車両の惰性走行時の減速度、あるいは目標地点到達時刻、をあらかじめ知って、現在地点から惰性走行を開始した場合の停止地点への到達可否の判定を行い、到達可であればその地点からの惰性走行を開始する。到達否であれば、車両現在地点から一定距離走行毎に前記操作を繰り返し、到達可となった時点で惰性走行を開始する。
また前方走行車両への追従走行に際し、前方走行車との車間距離、相対速度、安全車間距離を知って、安全車間距離を満足する同一特定車間距離での加速走行開始、惰性走行開始を交互に繰り返し行うことによって、あるいは相対速度があらかじめ定められている前方走行車との相対速度範囲上下限値+Vr1 および−Vr1到達時において各々惰性走行開始および加速走行開始を行うことによって、ブレーキ操作を介さない安全で効率的な追従走行を可能にする。
【選択図】 図6 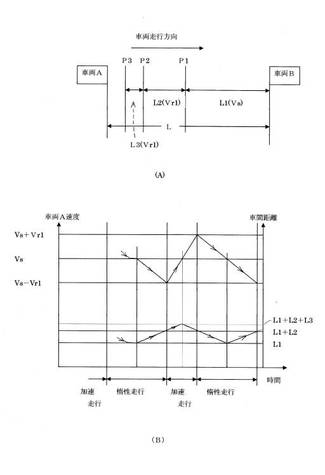 (もっと読む)
(もっと読む)
運転支援装置

【課題】本発明は、交差点のより安全な通行を支援することができる運転支援装置を提供する。
【解決手段】本発明に係る運転支援装置1は、交差点P入口の一時停止線Sの位置を検出するナビゲーションシステム3と、一時停止線Sの手前において運転者によるアクセル操作を無効化するエンジンECU8と、一時停止線Sにおける車両Aの停止後、運転者が交差点P周囲の交通状況を確認するための所定の確認動作を検出する確認動作判断部13と、確認動作判断部13による確認動作の検出後、運転者によるアクセル操作を有効化するエンジンECU8と、を備える。この運転支援装置1によれば、一時停止後アクセル操作による加速の前に運転者に確認動作を確実に行わせることができるため、交差点のより安全な通行を実現することが可能になる。
(もっと読む)
車両の制御装置
【課題】シフトバイワイヤシステムを有する車両の制御装置において、そのシフトバイワイヤシステムの異常が検出されたとき、好適な車両の駆動力抑制が実施される車両の制御装置を提供する。
【解決手段】シフトバイワイヤシステムの異常が検出され、且つ、車両停止が予測された場合、車両の駆動力を抑制する駆動力抑制手段134を備えるため、駆動力の抑制が車両停止が予測された場合のみ実施される。この状態では、仮に前後進切替操作が為されたときにシフトバイワイヤシステムの異常により前後進誤作動が発生しても、駆動力抑制手段134によって車両の駆動力が抑制されているため、運転者がアクセルを踏み込んでも車両の動き出しが鈍くなる。これより、車両の移動を最小限に抑制して、運転者がその異常に気付くことができる。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体が規定されている交通ルールを違反した場合でも自車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】移動体の交通ルールに基づいて運転支援を行う運転支援装置1であって、任意の領域において移動体が遵守する可能性の高い交通ルールを取得する交通ルール取得手段11,12,13を備え、交通ルール取得手段で取得した交通ルールに基づいて運転支援を行うことを特徴とし、特に、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない交通ルール逸脱領域を取得する領域取得手段13、あるいは、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない場合には交通ルール取得手段で取得した交通ルールに修正する交通ルール修正手段を備える構成とするとよい。
(もっと読む)
車両の運転支援装置
【課題】交差点に進入する車両の自車両に対する認識度を的確に判断し、交差点における自車両の情報を適切に加味して安全性を確保しつつスムーズな交通の流れを維持して自然で適切な運転支援を行う。
【解決手段】対象車両のドライバの顔向き方向に応じて対象車両のドライバの顔向き度Fiを設定し、対象車両のドライバの顔向き度Fiを基に自車両の被認知度Riを演算し、自車両の被認知度Riを基に自車両のリスクRiskiを演算して、自車両の被認知度Riが閾値Ricより高く且つ対象車両が1台しか存在しない場合、自車両が対象車両に対して優先走行の関係にある場合は、自車両のリスクRiを減少補正する。また、自車両の被認知度Riが閾値Ric以下、或いは、対象車両が複数存在する場合、自車両のリスクRiskiが閾値Riskltより高い場合はライトを点灯させる。
(もっと読む)
車輪速度演算装置
【課題】車輪速度センサから出力されるパルス信号のエッジに基づいて、車輪速度を演算する車輪速度演算装置において、エッジが未検出である場合に、実際の車輪速度の変化を反映させつつ、そのエッジが未検出である間の車輪速度を推定することができる車輪速演算装置を提供すること。
【解決手段】車輪の推定移動距離Dnに基づいて、エッジが未検出である期間における車輪速度を推定する。この車輪の推定移動距離Dnは、エッジが検出された時点の車輪速度におけるトレンドの変化線の傾きAnを考慮して推定されるので、実際の走行に近い状態で距離を推定できる。そして、この推定移動距離Dnを用いて、次のエッジが検出されるタイミングを予測し、そのタイミングを考慮して、エッジが未検出である期間における車輪速度を推定すれば、その推定に、実際の車輪速度の変化を反映させることができる。
(もっと読む)
車両用減速制御装置
【課題】交差点手前での減速制御を運転者の運転感覚に合致させる。
【解決手段】車両用減速制御装置は、交差点位置情報を含む地図データを格納する地図データ記憶部3と、地図データ記憶部3が格納する地図データの交差点位置情報に基づいて、自車両の運転者による交差点手前での交差道路に対する視野角を推定する見通し推定部11と、見通し推定部11が推定した視野角に基づいて、交差点手前で自車両を減速させる減速曲線を作成する減速曲線作成部12と、減速曲線作成部12が作成した減速曲線に基づいて、自車両の減速制御をする減速制御部5と、を備える。
(もっと読む)
車両制御装置及び該装置を搭載した車両
【課題】制動力を適切に設定可能とすることによりオペレータのフィーリングを最適な状態とする。
【解決手段】アクセル開度検出センサ2と、車速センサ3と、車両の減速度を調整可能な制動手段(ソレノイド制御ブレーキ)7とを備えた制御装置10において、所定のパラメータに応じて前記減速度が設定された減速度テーブル12を複数格納した記憶部10bを備え、減速度選択手段4、5により、目的とする減速度を選択された際に、車速が予め設定された車速V1以下で、且つアクセル開度が予め設定されたアクセル開度以下である場合に、前記減速度の選択を有効として、前記減速度選択手段により選択された減速度に対応する減速度テーブル12を前記記憶部10bより読み出し、該テーブルに規定された制動パラメータに基づき前記制動手段を作動させて、選択された減速度になるように減速制御を実行する。
(もっと読む)
車両挙動制御装置及びその方法
【課題】走行中の車両の実際の走行方向と反対の走行方向を示すシフト又はレンジを運転者が選択した場合に、トルクコンバータやクラッチでの差回転の発生を抑制して、運転者の意思に合致した走行制御を行う。
【解決手段】車両挙動制御装置は、走行中の車両の走行方向を検出する走行方向検出部71と、駆動輪の駆動力を制御し、かつ車輪の制動力を制御するECU16とを備える。ECU16は、走行方向検出部71が検出した車両の走行方向とセレクトレバー81のレンジが示す車両の走行方向とが異なる場合、エンジン2から駆動輪への駆動力の伝達を抑制し、かつ車輪の制動力を発生させる。そして、ECU16は、その後、車両の走行方向が反転する際、駆動輪の駆動力を増加させる。
(もっと読む)
車両制御装置
【課題】自車両の不必要な燃料消費を防止し、燃費を向上させる。
【解決手段】車両制御装置10は、自車両の速度を検出す車両状態センサ13と、自車両の位置を検出する現在位置検出部21と、自車両の進行方向前方に存在する車両停止位置を検出する停止位置検出部25と、自車両が慣性走行をおこなう状態での速度変化を予測する速度変化予測部23と、現在位置から自車両が慣性走行をおこなった場合に車両停止位置に到達する時点での速度を第1速度として算出する第1速度算出部26と、現在位置から自車両が慣性走行をおこなった場合に車両停止位置から所定距離手前の手前位置に到達する時点での速度を第2速度として算出する第2速度算出部27と、第1速度が第1所定値(例えば、ゼロ)以上である場合または第2速度が第2所定値以上である場合に加速制御の実行を禁止する車速制御部28とを備える。
(もっと読む)
車両の制駆動力制御装置
【課題】制動力と駆動力とを自動制御して車両の走行を行う極低速維持制御に対し、オイル温度の上昇に伴う極低速維持制御の強制終了を行うことなく、且つ頻繁な極低速維持スイッチON操作の煩わしさを無くすことができる車両の制駆動力制御装置を提供する。
【解決手段】車両の制動力と駆動力とを同時に自動制御して車両の走行を行うCRAWL走行中に、オイル温度が第1の油温閾値に達した場合には、スロットルバルブ12の開度を小さくし、CRAWL走行を一時的に休止することでオイル温度を低下させる。その後、オイル温度が第2の油温閾値まで低下した時点で、スロットルバルブ12の開度を復帰させ、CRAWL走行を再開させる。これにより、ドライバの操作を必要とすることなく、CRAWL走行の自動再開が可能になる。
(もっと読む)
車両制御装置
【課題】車両制御にあたり低速での定速走行制御時でも車体速度を精度よく推定する。
【解決手段】車両制御装置は、車体速度が目標速度に維持されるように、車両に対して付与する駆動力及び制動力を制御する車両制御装置であり、車両に備わる複数の車輪の車輪速度を夫々特定する特定手段(41FR、41FL、41RR、及び41RL)と、特定される車輪速度に基づいて、各車輪に係る車輪速度有効速度を夫々演算する演算手段(51)とを備える。そして、各車輪について演算される車輪速度有効速度(VWV)が、目標車速よりも低い所定速度閾値(KV)を下回るか否かに応じて、各車輪について特定される車輪速度が有効であるか否かを判定する判定手段(51)と、この判定手段により車輪速度が有効であると判定される車輪の車輪速度に基づいて、当該車両の車体速度を推定する推定手段(51)を更に備える。
(もっと読む)
車両制御装置
【課題】低速での定速走行制御時でも速度ハンチングを防止する。
【解決手段】車両制御装置は、車体速度が目標速度に維持されるように、車両(10)に対して付与する駆動力及び制動力を制御する車両制御装置であり、車両に備わる複数の車輪の車輪速度を夫々特定する特定手段(41FR等)と、特定される車輪速度に基づいて、各車輪に係る車輪速度有効速度を夫々演算する演算手段(51)とを備える。そして、これら各車輪について演算される車輪速度有効速度が所定速度閾値を下回るか否かに応じて、各車輪の車輪速度が夫々有効であるか否かを判定する判定手段(51)と、判定手段による判定結果に応じて、各車輪について演算される車輪速度有効速度のうち何れかの値を超える値に、目標速度を設定し直す設定手段(51)と、特定される車輪速度に基づいて当該車両の車体速度を推定する推定手段(51)とを備える。
(もっと読む)
走行制御装置
【課題】フィードバック制御によって車両の走行制御を行う場合により高精度な走行制御を行うことができる走行制御装置を提供することを課題とする。
【解決手段】走行計画に従って走行するようにフィードバック制御によって車両を走行制御する走行制御装置1であって、走行計画における目標軌跡の位置毎に重視する制御項目を決定する制御項目決定手段41と、この決定された重視する制御項目の制御ゲインを他の制御項目より高くする制御ゲイン決定手段41と、この決定された制御ゲインを走行計画に組み込む走行計画補正手段41とを備えることを特徴とする。
(もっと読む)
スリップ制御装置及びスリップ制御方法
【課題】駆動輪がスリップしたときに、車両速度の低下を抑制して、要求されている車両速度にて車両を走行する。
【解決手段】駆動トルクを演算するエンジン制御部9と、その演算した駆動トルクを駆動輪に付与する駆動トルク付与手段と、駆動輪がスリップしたときに駆動輪のスリップを抑制するスリップ抑制手段とを設け、駆動輪がスリップしたときに、エンジン制御部9が、演算した要求駆動トルクに、スリップ抑制手段による駆動輪のスリップの抑制にて消費する駆動トルクに応じた消費駆動トルクを加算して駆動トルクを演算する。
(もっと読む)
車両の制御装置
【課題】 車両10の旋回半径を短縮するために車両が備える複数の車輪のうちの所定の車輪に車輪制動力を付与する制御が行われているときに、所定のアクセルペダルの操作量に対して得られる車速の低下量を小さくできる車両の制御装置を提供すること。
【解決手段】 電子制御装置50は、車両の旋回半径を短縮するための旋回半径短縮制御条件が成立していないとき、運転者の加速意思に沿った車両駆動力を車両に付与する。一方、前記旋回半径短縮制御条件が成立したとき、電子制御装置は、前記車両の旋回半径が短縮するように車輪11FR〜11RLのうち所定の車輪に対して制御用車輪制動力を付与する。このとき、電子制御装置は、車両駆動力がその時点のアクセルペダルの操作量に対して通常制御時に発生させられる車両駆動力よりも所定駆動力だけ大きくなるように駆動装置20を制御する。
(もっと読む)
衝突予測装置
【課題】衝突予測精度の向上を図った衝突予測装置を提供すること。
【解決手段】他車両104の複数位置の物標点P1〜P5を各々検出し、各物標点P1〜P5について予測した衝突部位に基づいて自車両102と他車両104との衝突態様を予測する。これにより、複数位置の物標点P1〜P5を各々検出して、各物標点P1〜P5について衝突部位を予測しているので、他車両104の限られた点(従来の代表点)だけでなく、他車両104の複数位置について自車両102のどの部位に衝突するのかを予測することができる。従って、従来のグルーピング処理において、代表点P1,P3に包括されて物標出力されていなかったメンバーP2,P4,P5情報を有効活用することで、衝突予測精度を向上させることができる。
(もっと読む)
衝突防止装置
【課題】不要な衝突回避動作を防止して制御精度の向上を図った衝突防止装置を提供すること。
【解決手段】制御対象地点である特定エリアA1の直前に所定の道路環境B1が存在する場合に衝突回避動作の制御条件を変更し、特定エリアA1直前の所定の道路環境B1における不要な衝突回避動作を減らす。これにより、特定エリアA1直前の所定の道路環境B1を制御対象地点である特定エリアA1と誤認して、衝突回避動作が実行されることを防止する。その結果、不要な衝突回避動作を削減することで、運転者が煩わしさを感じることがなくなる。
(もっと読む)
車輌の制動装置
【課題】ブレーキペダルの操作感の悪化を防ぐことこと
【解決手段】車輪駆動力又は回生車輪制動力を発生させる電動機30が配備された車輌の制動装置において、運転者によるブレーキペダル63への操作圧力が伝わって発生した作動流体の圧力をそのまま又は増減して夫々の車輪10FL,10FR,10RL,10RRへと伝達させることで機械車輪制動力を発生させる作動流体圧力調節部(ブレーキアクチュエータ67)を備えた機械車輪制動力発生手段と、電動機30による回生車輌制動力及び機械車輪制動力発生手段による機械車輌制動力以外の外的制動力を車輌に働かせる外的制動力発生手段(走行抵抗発生手段90)と、電動機30の電気エネルギへの変換効率の低下時に運転者の要求車輌制動力を満たすべく当該低下分に相当する制動力を外的制動力で補填させる制動制御手段(総合ECU70,走行抵抗可変ECU91)と、を備えること。
(もっと読む)
21 - 40 / 48
[ Back to top ]