
Fターム[3D246HB12]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944) | 前方の車両 (469)
Fターム[3D246HB12]に分類される特許
461 - 469 / 469
商用車の電気式駐車ブレーキの制御のための方法
本発明は、電子制御ユニット(10)と、該電子制御ユニット(10)と通信可能な手動制御ユニット(12)とを有し、前記手動制御ユニット(12)を介して当該手動制御ユニット(12)の操作タイプに依存したドライバーの要求が電子制御ユニット(10)に伝送される、商用車の電気式駐車ブレーキの制御のための方法に関している。本発明によれば、前記駐車ブレーキが、商用車のドライバーによって実施される、手動制御ユニットの操作と関連しない操作に基づいて閉成される。  (もっと読む)
(もっと読む)
追突事故を防止する方法および装置

本発明は、車両前部の方向に向けられた環境センサ(2)を用いて、自車両の前方に存在する車両との間隔(d)および/または速度(vrel)を求め、始動状況にある際に、自車両が自車両の前方に存在する車両と衝突する危険が存在するか否かについて、運転者により操作される直線走行設定(alpha FP, alpha BP)を評価し、衝突の危険が存在する場合に、衝突の危険を低減させるために車両の駆動装置(10)および/または減速装置(11)に介入し、および/または、運転者に衝突に危険を知らせるために運転者警告装置(12,5)を駆動する、自車両の前方に存在する車両の後方で始動する際に追突事故を防止する方法および装置に関する。 (もっと読む)
衝突後における車両の安定化方法および装置

【課題】衝突後において、それに続く潜在事故の危険性および重大性を低減させるために、車両が有効に安定化され且つ同時に明らかに減速される、車両の安定化装置および方法を提供する。
【解決手段】衝突後における車両(9)の安定化装置は、制御アルゴリズム(4)を有する制御装置(1)と、走行状態を表わす異なる変数(ay、δ、dΨ/dt)を測定するためのセンサ装置(2)と、安定化係合を実行するためのアクチュエータ(3)とを含む。車両(9)の走行状態が、衝突の発生に関してモニタリングされ、少なくとも一部ドライバのかじ取り希望とは独立の、車両運動変数(ay、dΨ/dt、β)に対する目標値(aysoll、dΨsoll/dt、βsoll)が計算され、衝突の場合、車両(9)の車両運動変数(ay、dΨ/dt、β)がこの目標値(aysoll、dΨsoll/dt、βsoll)に制御される。
(もっと読む)
リバーシブルシートベルトプリテンショナを制御する方法及び装置
本発明は、車両のリバーシブルベルトプリテンショナ(1)を制御するための方法であって、アクセルペダル(4)及びブレーキ(2)に関する特性変数(K1〜K4)が、アクセルペダル(4)の解放及び引き続くブレーキ(2)の操作の形態で、危機的状況に対する運転者の反応に関して決定及び監視され、危機的状況に対する運転者の反応を特定した際に、プリベルトテンショナ(1)が作動される方法に関する。 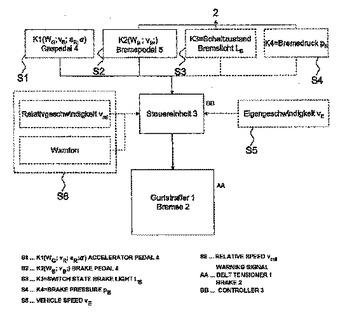 (もっと読む)
(もっと読む)
車両の衝突回避システム又は衝突軽減システム及びこれらを動作させるための方法
本発明は、車両(10)の衝突軽減システムの衝突回避システムを動作させるための方法に関する。車両(10)と潜在的な衝突対象物(11、20)との間の現在の走行間隔が検出され、第1の閾値(12)に達すると、第1の警告及び/又は通知機能が作動する。本発明によれば、第2の閾値(13)に達すると、自動的な部分制動と少なくとも1つの更なる安全措置との組合せを備えたシステム介入が開始される。本発明はまた、車両の衝突回避システム又は衝突軽減システムにも関する。 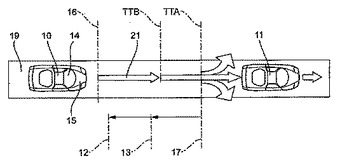 (もっと読む)
(もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 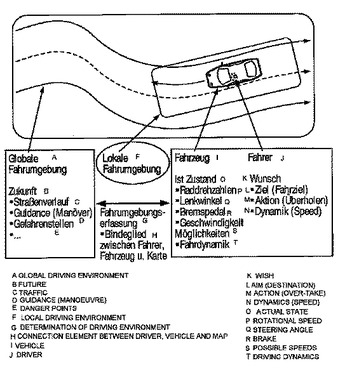 (もっと読む)
(もっと読む)
自動車の自動的縦制御方法および装置
間隔センサを有する、自動車の自動的な縦制御装置および方法が提案され、間隔センサは少なくとも、前を走行する車両に対する自己の、追従する車両の間隔および/または追従する車両に関する相対速度を測定する。測定値から、検出された、前を走行する車両が停止したかが定められるので、追従する車両は前を走行する車両の後方のある距離に停止される。前を走行する車両が再び始動したことが認識された場合には、追従する車両の運転者は始動操作装置を操作しなければならず、その場合に始動操作装置はブレーキペダルである。 (もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。 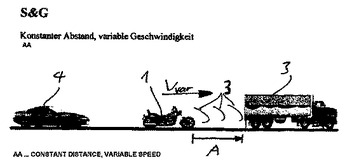 (もっと読む)
(もっと読む)
車両における安全手段を制御するための方法と構成
この発明は、車両における少なくとも二つの動作状態で動作可能な安全手段に関する少なくとも一つの作動変数を求めるための方法であって、安全手段の作動状態は、作動変数と所定の閾値との比較結果に従って変更可能であり、近接センサーを用いて、車両の周囲環境内に有る少なくとも一つの物体の物体データを検出し、この物体データは、物体の位置、物体の速度及び物体の移動方向を含むものである方法に関し、この方法は、物体データから、物体の第一の軌道を求めて、この軌道を、物体との衝突を回避するための運転操作を開始しなければならない最も遅い時点までの第一の時間間隔を算出するために用いることと、第一の時間間隔に従って、作動変数を求めることとを特徴とする。更に、この発明は、安全手段を制御するための方法及びその方法を実施するための構成に関する。  (もっと読む)
(もっと読む)
461 - 469 / 469
[ Back to top ]