
Fターム[3D246HB24]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 外部装置からの情報 (624) | ナビ情報 (462)
Fターム[3D246HB24]の下位に属するFターム
自車の位置 (161)
Fターム[3D246HB24]に分類される特許
201 - 220 / 301
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の心理的状態に対応した適切な車速の制御を行うことはできなかった。
【解決手段】自車両の前方の下り勾配の道路を走行する際に前記自車両の運転者に心理的影響を与える要因を示す要因情報を取得し、前記要因情報に基づいて前記下り勾配の道路を走行する際に前記運転者に与えられる総合的な心理的影響を取得し、前記総合的な心理的影響に応じて前記自車両に搭載された車速制御部に車速を制御させる。
(もっと読む)
車体速度制御装置

【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者のステアリング操作の意図と走行制御とを合致させる。
【解決手段】車両用走行制御装置は、操舵角θsを検出し(ステップS1)、検出し操舵角θsを基に、運転者による車両の横位置の変更の意図の有無を判定し(ステップS4)、運転者による車両の横位置の変更の意図有りと判定した場合、横位置の制御目標値を変更する(ステップS5)。
(もっと読む)
制動装置
【課題】制動力を保持する制御が誤作動することを確実に防止することができる制動装置を提供する。
【解決手段】制動操作部材の操作に応じて車両の車輪に制動力を発生させると共に制動力を保持可能な制動手段2と、車両の停止状態が所定時間継続した後に制動力を保持する制動力保持制御を実行可能とすると共に、車両の停止前の減速度が大きい側における所定時間を小さい側における所定時間より長く設定する制御手段3とを備えることを特徴とするので、制動力を保持する制御が誤作動することを確実に防止することができる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】他の車両についての情報が得られなくなる場合でも、該他の車両を対象とした制御を適切に行う。
【解決手段】車両用走行制御装置は、他の車両の情報を取得し(ステップS8)、自車両がカーブに侵入する前に、その取得した他の車両の情報を基に、該カーブ区間で自車両とすれ違う可能性のある対向車両の有無を判定し(ステップS9、ステップS10)、対向車両有りと判定した場合、カーブ区間を走行する該対向車両に対応しつつ、カーブに対応して自車両の制御を行う(ステップS11〜ステップS18)。
(もっと読む)
車両の定点停止制御方法および装置
【課題】例えば一時停止線に自動停止する場合に、停止間際において、ナビから送信されてくる残距離が、急に0になったり、逆に増加したりして、停止線までの残距離が若干変動したとしても、違和感のない停止制御を実現する。
【解決手段】GPS情報に基づいた自車の現在位置が、目標停止点に停止するために減速開始すべき距離に到達すると、GPS情報による自車の現在位置情報に基いて、定点停止のための第1の減速制御を開始する。そして、たとえば一次停止線の4〜5m程度の停止間際になったら、GPS情報を使わずに、車上にて走行距離を積算して現在位置情報を求め、これに基づき、定点停止のための第2の減速制御を停止に至るまで実行する。
第2の減速制御の間には、その基準となる残距離が、急に0になったり、逆に増加したりすることは一切無くなるので、停止線まで正確でスムースな減速制御を実現できる。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】回避しにくい障害物が存在する領域を表わす危険領域を的確に検知して優先的に障害物の検出をすること。
【解決手段】障害物検出部が、前方における所定の検出対象領域を探索することによって障害物を検出する際に、優先領域設定部が、障害物検出を優先する優先領域を検出対象領域内に設定し、検出指示部が、優先領域についての探索を優先領域以外の領域である通常領域についての探索よりも優先して行うように障害物検出部に対して指示するように障害物検出装置を構成する。
(もっと読む)
ブレーキ制御システム
【課題】制動レスポンスの維持や操作性能の維持を考慮しつつ、燃費向上が可能なブレーキ制御システムを提供する。
【解決手段】ブレーキ制御システムの制動予定取得部30は、所定の条件が揃い走行中の車両に制動予定がないと見なされた場合に、引摺回避制御部34を介して通常引き摺り状態にあるディスクロータとブレーキパッドを強制的に離間させて、引き摺り状態を回避させる。そして、制動予定のない走行時、例えば定速巡航走行時などにおける燃費改善を実現する。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
車両の運動制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の運動制御装置を提供すること。
【解決手段】この装置では、車速Vxを設定車速Voに維持する定速制御実行中において、カーブの存在が認識されると、「予め記憶されている原動機制動トルク特性と予め設定されている変速機の変速パターンとに基づいて決定される車速の減少特性」と、カーブ走行に適正な車速Vqと、車速Vqを達成するための目標地点Pcrとに基づいて、地点Pcrにおいて車速Vqまで車両を減速させるための目標車速特性Vt(A-B線)が演算される。そして、カーブと車両との相対位置と車速Vxとの関係が目標車速特性Vtを満足した場合(地点Pcs1)、減速制御が開始・実行される。減速制御では、原動機制動トルクが作用させられ、且つ上記変速パターンに従ってシフトダウンされていく。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者に違和感を与えることなく、カーブ路に対応して自車両を制御する。
【解決手段】車両用走行制御装置は、ナビゲーションシステムから得たカーブ曲率を基に、自車両の前方のカーブ路に対応して警報出力制御及び自動減速制御を行っている。車両用走行制御装置は、自車両の前方のカーブ路に存在する道路上等表示を認識し、その認識した道路上等表示を基に、カーブのきつさ度合いを推定し(ステップS6、ステップS7)、推定したカーブのきつさ度合いを基に、警報出力制御及び自動減速制御を補正する(ステップS8、ステップS14)。
(もっと読む)
車体速度演算装置
【課題】旋回中の車両において、コストの増加を抑制しつつ、任意の位置の車体速度を精度よく演算できる車体速度演算装置を提供すること。
【解決手段】回転状態が異常であると判定された車輪を除く2輪以上の車輪の車輪速度とそれらの車輪の幾何学的位置とから、各車輪4FR〜4RLが共通の1点(点O)を中心に旋回する「アッカーマンジオメトリ」に基づいて規定される旋廻中心(点O)の幾何学的位置を求め、更に、その旋廻中心(点O)からの幾何学的な位置関係に基づいて、車両VLの任意の位置における車体速度を演算する。これにより、従来、車体速度を算出するために用いられる各種センサが不要となり、コストの増加を抑制しつつ、任意の位置の車体速度を精度よく演算できる。
(もっと読む)
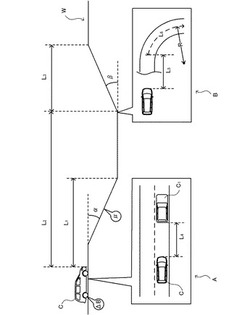
車両速度自動制御方法、システム及びコンピュータ・プログラム・プロダクト
車両の自動速度制御方法及びシステムにおいて、燃料消費を最適化し、直感的なものと見なされる距離において、走行前方の制限速度が低下することに応じて減速を開始する。これにより、本方法及びシステムは、早過ぎる減速を防ぐ。 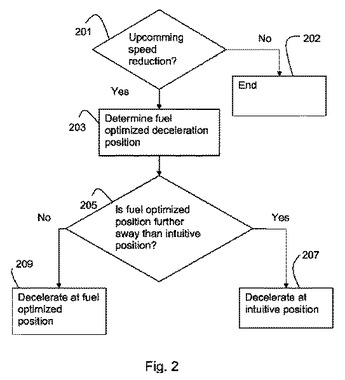 (もっと読む)
(もっと読む)
車両の運動制御装置
【課題】走行アシスト制御と限界ガード制御の2種類のカーブ減速制御を走行状態に応じて使い分けてカーブ減速制御を効率的に実行する車両の運動制御装置を提供すること。
【解決手段】この装置では、カーブ減速制御として、運転者による減速操作をアシストする走行アシスト制御(第1制御)と、旋回限界を超えないように車両走行安定性を確保する限界ガード制御(第2制御)とが実行される。カーブの形状に基づいて、カーブを通過する際における第1、第2制御用の適正車速Vq1,Vq2(Vq2>Vq1)が決定される。このVq1,Vq2に基づいて道路上の位置に対する第1、第2制御用の目標車速特性Vt1,Vt2が演算され、この特性Vt1,Vt2に基づいて第1、第2制御が選択的に開始・実行される。このとき、第1制御の実行中か否かにかかわらず第2制御は開始・実行される。一方、第2制御の実行中は第1制御が実行されない。
(もっと読む)
車両の運動制御装置
【課題】カーブ減速制御実行中に車両安定性制御の開始が判定された場合、カーブ減速制御から車両安定性制御へと制御を円滑に移行できる車両の運動制御装置を提供すること。
【解決手段】この装置では、車両が適正な車速でカーブを通過できるようにカーブ減速制御用の制御量に基づいて車輪制動力を制御するカーブ減速制御と、車両のヨー安定性を維持できるように車両安定性制御用の制御量に基づいて車輪制動力を制御する車両安定性制御と、が選択的に実行される。カーブ減速制御実行中において車両安定性制御制御の開始が判定された場合、カーブ減速制御から車両安定性制御へと制御が切り替えられる。制御切替時点以降、車両安定性制御用の制御量にカーブ減速制御用の制御量が加算されて車両安定性制御用の修正制御量が演算され、この修正制御量に基づいて車両安定性制御が実行されていく。これにより、制御切替時点において車両制動力の総和に変化が発生しない。
(もっと読む)
車両の運動制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の運動制御装置を提供すること。
【解決手段】この装置では、カーブの形状に基づいて、カーブの途中の基準地点Pcrと、基準地点Pcrを車両が通過する際における適正車速Vqとが決定される。基準地点Pcrと適正車速Vqとに基づいて、基準地点Pcrから手前側の道路上にて車両の減速が行われる場合における道路上の位置に対する車速の減少特性の目標(目標車速特性Vt)が演算される。現在の車速Vxが、目標車速特性Vtから得られる車両の現在位置に対応する車速を超えた地点Pcsにて減速制御が開始される。車速Vxが適正車速Vqを含む所定範囲Hn内に達したとき(点G)に減速制御が終了される。減速制御の終了に続いて所定期間に亘って車両の加速を制限する加速制限制御が実行される。
(もっと読む)
衝突被害軽減制動制御装置
【課題】状況に応じてより遠くからブレーキを作動させることができるような衝突被害軽減制動制御装置を提案する。
【解決手段】本発明の衝突被害軽減制動制御装置は、レーダにより得られる車両前方の障害物との車間距離及び相対速度が、制動回避限界を越えるか否か判断する制動回避限界判断手段(S6)と、ナビゲーションシステムにより得られる自車位置及び地図情報に基づいて、走行中の道路の車線数を判別する車線数判別手段(S5)と、該車線数判別手段が片側2車線以上無いと判別し且つ前記制動回避限界判断手段が制動回避限界を超えると判断したときに、制動を実行する制動制御手段(S7〜S4)と、を含んだ構成であることを特徴とする。
(もっと読む)
走行支援システムの制御方法および走行支援システム
本発明は、車両(2)の周囲状況(100)を検出する複数のセンサと搭載装置群への介入制御を行う装置とを備えた、走行支援システムの制御方法および走行支援システムに関する。本発明によれば、走行支援システムは、少なくとも、車両の走行する車線(1)の特性とこの車線に対する車両位置とを検出し、ドライバーの要求に応じたトラジェクトリ(T1〜T4)を設定し、設定されたトラジェクトリに沿って車両をガイドする。  (もっと読む)
(もっと読む)
車両監査装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御の正当性を正しく判定し、機能ドメイン制御手段の冗長系の複雑化を防止する車両監査装置およびそれを用いた車両制御システムを提供する。
【解決手段】イントラボックス100は、タイヤ70の挙動を制御するステアリング制御装置30およびブレーキ制御装置40とは独立して設置されている。イントラボックス100の挙動情報取得手段210は、各種センサの検出信号等から車両の実際の挙動情報を取得する。監査手段240は、車両の実挙動情報に基づいて、ステアリング制御装置30およびブレーキ制御装置40のタイヤ70に対する挙動制御の正当性を判定する。ステアリング制御装置30およびブレーキ制御装置40による挙動制御が異常の場合、監査手段240は、車両の挙動異常を解消するように、ステアリング制御装置30およびブレーキ制御装置40に対して挙動制御の指令値を出す。
(もっと読む)
車両挙動制御装置
【課題】車両のアンダーステア状態又はオーバーステア状態の制御性能を良好に維持すること。
【解決手段】車両挙動制御装置10は、車速Vを検出する車速検出手段11と、実ヨーレートψを検出する実ヨーレート検出手段13と、車両が走行する道路のカーブの曲率半径Rを算出するカーブ曲率半径算出手段14と、車速Vとカーブの曲率半径Rとに基づいて目標ヨーレートψTを算出する目標ヨーレート算出手段15と、実ヨーレートψと目標ヨーレートψTとの偏差であるヨーレート偏差Δψを算出するヨーレート偏差算出手段16と、実ヨーレート検出手段13により検出された実ヨーレートψと、ヨーレート偏差算出手段16により算出されたヨーレート偏差Δψと、に基づいて、車両の制動力を制御することで、車両のアンダーステア状態又はオーバーステア状態を制御する制動力制御手段17と、を備えている。
(もっと読む)
201 - 220 / 301
[ Back to top ]