
Fターム[3D301AA40]の内容
Fターム[3D301AA40]に分類される特許
1 - 20 / 39
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両のロール角推定方法及び装置

【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
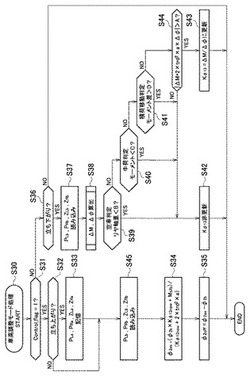
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
原動機付四輪車両
【課題】幅方向に一名しか収容できず、運転者の保護構造に統合されたシャーシと一体化した状態で作られた運転席、及びシャーシと二つの前車輪の同時傾斜により、水平との関係において傾斜した地面上及び/又はカーブ内で車両を平衡化させる手段を有し、四つの車輪を提供する。
【解決手段】四輪型原動機付車両1は、停止時及び低速時に自動的に介入する傾斜ブロック手段を有する。この車両は、停止時に車両が転倒しないような最大値に前記傾斜を制限するための手段を有している。車両は、幅が狭いので狭い場所を走行でき、また、狭い車体幅にもかかわらず、停止時、低速走行、高速度走行、カーブ内走行、段差内走行のいずれにおいても、安定を保つことができる。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する2つのセンサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、2つのセンサが検出する横加速度に基づいて、旋回方向外向きの加速度におけるセンサの検出軸方向の加速度成分と、重力におけるセンサの検出軸方向の加速度成分との合成値を選択的に算出し、車体の傾斜を制御する。
(もっと読む)
スタビライザ装置
【課題】 捩りトルクや曲げモーメントに対する剛性を高めることにより、安定的に制御できるようにする。
【解決手段】 ケーシング6の筒体7内に延長部支持部材18を設け、この延長部支持部材18によって第2のスタビライザバー3の延長部4の先端軸部4Bを支持して軸線O−O上に位置決めすることにより、延長部支持部材18は、基端軸部4Aを支持するアンギュラ玉軸受9との間で延長部4を両持ち状態で支持する構成としている。従って、捩りトルクや曲げモーメントが作用した状態でも、各ランププレート12,13を軸線O−Oで同軸度を保ったまま相対的に回転運動、直動運動させることができ、安定的な制御を行うことができる。
(もっと読む)
車両、及び車両制御プログラム
【課題】車体の傾斜を許容角度以内に保ちながら旋回時の安定性を実現する。
【解決手段】車両1は、車体部10の傾斜角度を監視し、傾斜角度が所定の限界値に達する場合、スロットル開度センサ12のスロットル開度Sに対する駆動輪のトルクゲインを低く調節する。即ち、傾斜角度が限界値を越えそうな場合、スロットル操作の効き具合をなまらせる。これにより、傾斜角度が限界値を超えるような車速を抑制することができ、車両1は、安定して旋回することができる。また、車両1は、傾斜角度の検出値に、当該検出値の微分を加えることにより傾斜角度の直近の未来の値を予測し、車体部10の傾斜角度として当該予測値を用いることにより精度の高い制御を行っている。
(もっと読む)
強制車高調整可変ロアア−ムによる可変キャンバ−を備えた車両安定装置を有するシャ−シ
【課題】車両は旋回時 外側にGを感じ体に負担を与える 又タイヤにも 負担を与え タイヤの消耗も早くなっていた
【解決手段】旋回時の車両の外側を持ち上げ なおかつロアア−ムを伸ばし車両の状態を 平行に保つ
(もっと読む)
車両用傾き規制装置とその規制装置を備えた車両
【課題】 車両の横幅方向への傾きを規制して車両の横転を防止すること。
【解決手段】 車両の車体側に取り付けられる車体側ギヤと、前記車両の車軸側に取り付けられる車軸側ギヤを備え、前記車体側ギヤと車軸側ギヤは互いに昇降スライド可能に且つ相対的に接近・離間可能に配置され、前記両ギヤ又はいずれか一方のギヤは、車体が所定角度以上傾斜すると駆動体により相対的に接近駆動されて互いに噛み合って係止して、車体の傾斜を規制できるようにした。この車両用傾き規制装置を車両の進行方向左右両側に取り付けた。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両のローリング挙動制御装置
【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
車両支持装置
【課題】車両が転倒する可能性を的確に排除しつつ、車両を路面の状況に応じた適切な状態で走行させることを可能にする車両支持装置を提供する。
【解決手段】車両に適用される車両支持装置であって、車両本体2を支持し、支持状態を車幅方向の一支点又は二支点のいずれかに切り替え可能な前方車輪ユニット4と、前方車輪ユニット4の後方に設けられ、車両本体2を車幅方向の二支点で支持する後方車輪ユニット6と、各支点に作用する車両荷重の荷重中心位置を検出する荷重中心位置検出手段(圧力センサ8等)と、荷重中心位置検出手段の検出結果に基づいて、前方車輪ユニット4が一支点で支持する場合の一支点と、後方車輪ユニット6が支持する二支点とを結ぶ平面領域内に、荷重中心位置が属するか否かを判定し、荷重中心位置判定部10の判定結果に基づいて、前方車輪ユニット4の支持状態を一支点又は二支点のいずれかに切り替えさせるようにした。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とする。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御する制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
車両の横転判定装置及び方法
【課題】従来の車両の故障を診断する装置においては、車両の衝突ないし横転時に、車両の衝突ないし横転に伴って乗員が投げ出されたり飛び出したりすることを防止するための乗員の拘束性を高めることができない。
【解決手段】車両のロール角速度を検出するロール角速度センサ15と、ロール角速度センサ15にて検出したロール角速度の値からロール角を算出するロール角算出部22と、一方の座標軸をロール角、他方の座標軸をロール角速度とする関数のマップと、マップ上に横転限界線を設定し、ロール角算出部22にて算出したロール角及びロール角速度センサ15により検出したロール角速度の値がマップの原点から見て横転限界線を越えるときに車両が横転する可能性があると判定する判定部12とを有する。
(もっと読む)
転角試験補助具
【課題】エアサスペンション装置を備えた車両の転角試験を能率良く実施することができる転角試験補助具を提供する。
【解決手段】エアサスペンション装置10を備えた車両にレベリングバルブ50が設けられている。車高が所定値よりも低いと、レベリングロッド52を介して車高検知レバー51が回動上昇することにより、エアタンクからの圧縮空気がエアスプリング40に供給される。車高が所定値よりも高いと、レベリングロッド52を介して車高検知レバー51が回動降下することにより、エアスプリング40内の空気が排出される。車両の転角試験を行なう際に、転角試験補助具80がレベリングバルブ50に装着される。転角試験補助具80は、レベリングバルブ50に固定される基部81と、車高検知レバー51が自重により下がることを阻止するレバー支持部材82と、基部81とレバー支持部材82とにわたるアーム部83とを有している。
(もっと読む)
走行安定二輪車
【課題】二輪車の軽快性を損なうことなく、転倒防止機能を高めた、前後に幼児2人を乗せた3人乗りにも供する安全性の高い走行安定二輪車を提供する。
【解決手段】後輪部に左右独立のトレーリングアーム141とストラット150を備えたトレーリングアーム式懸架装置に補助輪RRを設け、該トレーリングアーム141の回転軸をチエンステイ110の下部であり、側面視で後輪タイヤの外径線の外、かつ前側に設け、トレーリングアーム141を略水平に配置し、前記ストラット150の上部を、前記チエンステイ110及び後フォーク120に取付け、下部を前記トレーリングアーム141に取付ける。
(もっと読む)
走行安定装置及び該装置を備えた産業車両
【課題】傾斜面走行時や旋回時等において車体が傾くことを抑制し、走行安定性を確保することができる走行安定装置及び該装置を備えた産業車両を提供する。
【解決手段】フォークリフトの車体2と、該車体2に揺動可能に支持されたステアリングアクスル20との間に、左右一対の油圧シリンダ10、15が設けられるとともに、該油圧シリンダ10、15の伸縮量を制御するコントローラ26が設けられた走行安定装置において、前記車体2には、該車体2の左右方向の絶対傾斜角θを検出する車体傾斜角センサ25が設けられ、前記コントローラ26は、前記車体傾斜角センサ25で検出された車体傾斜角θが逐次入力され、該車体傾斜角θが予め設定された設定傾斜角θ1以上になった時、前記油圧シリンダのうち車体傾倒側の油圧シリンダ10を伸ばす制御を行うようにした。
(もっと読む)
傾斜制御用機械装置
本発明に係る装置は、箱体(100)と、可傾フレーム(200)と、前記可傾フレームの前記箱体に対する傾斜を許容するパッシブジョイント(300)と、前記ジョイントを係止する手段(400)とを備える。前記装置は、前記可傾フレーム(200)が供される横加速度を測定する加速度計(500)と、前記横加速度が所定の閾値を上回ると前記係止手段を動作させる制御回路とを更に備える。本発明に係る車両、とりわけ三輪車は、前記装置を備えている。 (もっと読む)
車両のロール角推定方法及び装置
【課題】車高調整非実行時のロール角を推定することが可能な方法及び装置を提供する。
【解決手段】左右サスペンションの自動車高調整開始時の一定時間前から終了時の一定時間後までの任意の異なる2つの時点の各々において測定した各変位及び各内圧値から、それぞれ第1及び第2のロール角と該左右サスペンションによる第1及び第2のロールモーメントとを算出し、該ロール角及びロールモーメントから、該サスペンションを装着した車両固有のロール剛性係数を算出する。該サスペンションが示し得る内圧値をパラメータとして予め求めた複数個の変位特性の内、該左右サスペンションの測定内圧平均値に対応する変位特性を、該自動車高調整非実行時の該左右サスペンションに共通の変位特性として選択する。そして、該第2のロール角及びロールモーメント、該ロール剛性係数、及び該選択した変位特性に基づき該自動車高調整非実行時のロール角を求める。
(もっと読む)
サスペンション制御装置
【課題】スタビライザのロール剛性を液圧により制御可能なサスペンション制御装置において、車両の旋回走行時における走行安定性を確保しつつ、キャビテーションの発生を防止または抑制する。
【解決手段】フロントスタビライザおよびリアスタビライザに加え、さらに両スタビライザのロール剛性を液圧により調整するフロント液圧シリンダおよびリア液圧シリンダを設けることで、車両旋回時の高いロール剛性が確保され、車両の安定した走行状態が維持される。一方、車両が旋回中であっても、横加速度が予め定める限界判定値以下であれば、2つの液圧通路のうち液圧が高い側にある電磁弁を閉弁状態として所定のロール剛性を確保するとともに、低い側にある電磁弁については開弁状態とする。
(もっと読む)
1 - 20 / 39
[ Back to top ]