
Fターム[3D301AA55]の内容
Fターム[3D301AA55]に分類される特許
1 - 18 / 18
スタビライザバー支持構造
【課題】スタビライザバーの支持剛性を入力の増大に応じて高くすることが可能なスタビライザバー支持構造を提供する。
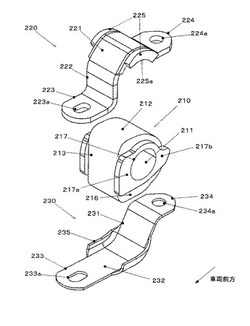
【解決手段】左右のサスペンション装置のストローク差に応じた捻り入力を受けるスタビライザバー110の中間部111を支持するスタビライザバーの支持構造を、弾性を有する材料によって筒状に形成されスタビライザバーの中間部が挿入される開口211を有するブッシュ210と、ブッシュを保持した状態で車体の一部に設けられた被固定部40に装着されるクランプ220とを備え、ブッシュは、端面部216からスタビライザバーの軸方向に突き出した突出部217を有し、クランプは、スタビライザバーからの径方向入力が所定値未満の領域においては突出部と間隔を隔てて対向し、径方向入力が所定値以上の領域においては突出部と当接する当接面部225aを有する構成とする。
(もっと読む)
スタビライザバー支持構造

【課題】クランプを2部材からなる構成としても組立作業を容易に行なうことができかつ車両の操縦安定性を向上させたスタビライザバーの支持構造を提供する。
【解決手段】スタビライザバー110の中間部111を支持するスタビライザバーの支持構造であって、弾性を有する材料によって筒状に形成されスタビライザバーの中間部が挿入される開口211を有するブッシュ210と、ブッシュを保持した状態で車体の一部に設けられた被固定部40に装着されるクランプとを備え、クランプは、ブッシュを挟んで対向して配置され、ブッシュの上部及び下部をそれぞれ保持する第1部材220及び第2部材230を有し、第2部材にブッシュの一部を挟み込んだ状態で挟持する挟持手段232a、231aを設けた構成とする。
(もっと読む)
横転警報装置、車両、および横転警報方法、並びにプログラム
【課題】簡単な処理により、運転開始に先立って、運転者が車両の横転し易さを直接的に把握すること。
【解決手段】車両のロール角度を所定のサンプリング周期毎に記憶するロール角度記憶部23と、エアベローズ内の空気圧の変化に応じ、荷台への貨物の積載開始を判定し、荷台への貨物の積載開始を判定したときからの空気圧の変化に応じ、荷台への貨物の積載完了を判定し、積載完了と判定した時刻とその所定期間前の時刻との間にロール角度記憶部23に記憶されたロール角度のサンプリング値の平均値から積載開始と判定した時刻とその所定期間前の時刻との間にロール角度記憶部23に記憶されたロール角度のサンプリング値の平均値を減算してロール角度を取得するロール角度検出部21と、ロール角度を横転の危険性を示す指標として表示画面24に表示する表示制御部22と、を有する横転警報装置20を構成する。
(もっと読む)
サスペンション装置
【課題】 、電動アクチュエータのモータに供給する電力を変圧するDC/DCコンバータ等の変圧器の出力電圧(モータの駆動電圧)を所定の電圧以下の範囲でできるだけ高くすることができるサスペンション装置を提供すること
【解決手段】 DC/DCコンバータ30の出力電圧は、電力モニタ装置65により検出されて、その検出電圧が出力電圧取得部55に取得される。取得された出力電圧は、電動アクチュエータの作動状態を表す消費電力Wcomに応じて取得される変動電圧ΔVを差し引くことにより補正され、補正された補正電圧V1が基準電圧(47.5V)に近づくように、DC/DCコンバータ30の出力電圧が調整される。
(もっと読む)
操縦性能可変装置
【課題】車両のサスペンションを構成するダンパーの動作速度が微低速であっても、ダンパーが滑らかに作動するように簡便な装置構成によって車両の操縦性能及び乗り心地を向上させることを可能にする操縦性能可変装置を提供する。
【解決手段】車両に装着されるダンパーのフリクションを変化させて車両の操縦の安定性能を可変する操縦性能可変装置であって、ダンパーと電気的に導通する車両の一部に電気ノイズを印加する電気ノイズ印加手段を備える構成とした。
(もっと読む)
車両用制御装置
【課題】車両の旋回特性を制御できる車両用制御装置を提供すること。
【解決手段】車両用制御装置100によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置44が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる。
(もっと読む)
多室型ガススプリングを備えるガススプリングシステム
本発明は、それぞれの車両ホイール(VL、VR、HL、HR)に、1つの多室型ガススプリング(FVL、FVR、FHL、FHR)が配置されている車両のガススプリングシステムに関する。多室型ガススプリング(FVL、FVR、FHL、FHR)は、メインチャンバ(17)と、このメインチャンバ(17)に接続可能な少なくとも1つの補助チャンバと、を有しているため、多室型ガススプリング(FVL、FVR、FHL、FHR)のスプリング強度を変更することができる。制御装置(15)は、指標横方向加速度に応じて規定車軸強度を算出し、これを設定する。この場合、まず、車両のカーブ内側にある前記多室型ガススプリング(FVL、FVR、FHL、FHR)のスプリング強度(CVL、CVR、CHL、CHR)が変更される。特に、車軸(VA、HA)の両ホイールの多室型ガススプリング(FVL、FVR、FHL、FHR)のスプリング強度は、交互に段階的に変更される。 (もっと読む)
電磁サスペンション制御システム
【課題】本発明は、バッテリーの残存量を所望の範囲内に維持することが可能な電磁サスペンション制御システムの提供。
【解決手段】車両制御ECUが実行する蓄電量調整制御処理では、蓄電量が規定範囲内であれば、最頻速度における釣合減衰トルクを維持トルク特性値として読み出す(S140)。蓄電量が下限値未満であれば、釣合減衰トルクよりも小さな釣合減衰トルクを有するトルク特性を回収側トルク特性値として読み出し(S160)、蓄電量が上限値を上回る場合、釣合減衰トルクよりも大きな釣合減衰トルクを有するトルク特性を消費側トルク特性値として読み出し(S170)、電動機制御ECUに出力する(S180)。トルク特性値が入力された電動機制御ECUは、そのトルク特性値が示す大きさの指令トルクを駆動軸に負荷するように、インバータを制御して、インバータ12から出力され、コイルに流す電流の大きさを変更する。
(もっと読む)
サスペンション制御装置、サスペンションシステムおよびサスペンション機構の制御方法
【課題】サスペンション機構のシリンダに対する作動液の流出入のしやすさを変化させるばね定数を切り替える切替弁を寿命作動回数まで使い切るようにして、切替弁の使用による車両性能を十分に発揮させる。
【解決手段】各種センサ102〜112は、車両の運転状態に関する物理量を検出する。ばね定数切替判定部120は、検出された物理量と予め定められたしきい値とを比較してばね定数を切り替えるか否かを判定する。作動頻度推定部140は、予め定められたタイミングで車両の耐用限界時における切替弁の推定作動頻度を計算する。寿命余裕判定部152は、推定作動頻度と予め設定されている前記切替弁の寿命作動頻度とを比較する。しきい値更新部154は、寿命余裕判定部152における比較の結果に応じて、車両の耐用限界時に切替弁の作動頻度が寿命作動頻度を超えない範囲でしきい値を変更する。
(もっと読む)
車両用サスペンションシステム
【課題】ばね上部とばね下部とに対してそれらを接近・離間させる方向の力を作用させる電磁式アクチュエータを備えたサスペンションシステムの実用性を向上させる。
【解決手段】振動減衰制御において発生させるアクチュエータ力である振動減衰成分と、車体姿勢制御において発生させるアクチュエータ力である姿勢制御成分との和である両成分和に基づいて、アクチュエータが発生させるアクチュエータ力を制御するものとされたシステムを、姿勢制御成分を制限値以下に制限する制御を実行可能に構成する。本システムによれば、発生可能なアクチュエータ力に限界がある中で、姿勢制御成分を制限することによって、振動減衰制御において発生させるべきアクチュエータ力を確保することが可能であり、そのことにより、充分な減衰力を発生させて、車両の乗り心地等の悪化を抑えることが可能である。
(もっと読む)
サスペンション装置
【課題】 イグニッション操作時にセンサ信号にノイズが重畳してアクチュエータが予期しない動作をするといった不具合を防止する。
【解決手段】 車両ドア開閉によりイグニッションオン操作を事前に予測し(S20)、センサ類に通電するとともにセンサ出力に対して上限値リミッタを設ける(S21〜S22)。そして、実際のイグニッションオン操作を検出したのち、センサ出力リミッタを解除し(S25)、モータ駆動回路を短絡モードから駆動モードに切り替える(S26)。このとき、モータ駆動回路へのモータ制御指令値に対して所定時間だけ上限値リミッタを設ける(S27〜S29)。この結果、イグニッション操作時にセンサ出力信号にノイズが重畳してもシステムの安定作動が図られて、電磁アクチュエータ30の誤動作が防止される。
(もっと読む)
車両制御システム
【課題】段差を通過する際に、車両の速度と上下方向加速度との関係を示す特性値が快適さの臨界値を示す快適境界線に近くなるようにサスペンション制御を行うことによって、乗り心地と走行安定性とを高い次元で両立させることができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差の段差情報を記憶する記憶手段と、該記憶手段に記憶されている段差の段差情報に基づいて段差制御を行うとともに、車両の速度と上下方向加速度との関係を示す特性値が快適さの臨界値に応じて変化するように制御量を変化させる段差制御手段とを有する。
(もっと読む)
車両用懸架装置
【課題】 アキュムレータによって得られるばね定数の変更を制限してシステムの破損を防止する。
【解決手段】 車両用懸架装置は、ショックアブソーバ10(懸架シリンダ)およびばね定数可変装置20を含むシステムと、電気制御装置(ECU)41および各種センサ45,46,47等とを備える。ばね定数可変装置20は、アキュムレータ21,22およびばね定数切換弁23を備える。ショックアブソーバ10の液室R1は、アキュムレータ22の液室R5に接続されるとともに、ばね定数切換弁23を介してアキュムレータ21の液室R3に接続される。電気制御装置(ECU)41は、各種センサ45,46,47等の検出結果に基づいて、システムの内圧がシステムの耐圧許容下限値以上であるか否かを判定し、同耐圧許容下限値以上であると判定したとき、アキュムレータ21,22によって得られるばね定数が低ばね定数から高ばね定数に変更されることを制限する。
(もっと読む)
車両のキャンバ角制御装置およびキャンバ角制御方法
【課題】 車高調整機構を設けることなく、旋回時の車体ロール角を小さくできる車両のキャンバ角制御装置を提供する。
【解決手段】 検出された横Gに応じて、車体ロール角θをゼロとするサスペンション取り付け位置角θ'を算出し(ステップS2)、算出したサスペンション取り付け位置角θ'に基づいて、旋回内側のキャンバ角φiを旋回外側のキャンバ角φoよりもネガティブ方向に大きな角度とする(ステップS3)。
(もっと読む)
能動サスペンションと能動スタビライザとを協調作動させる車輌
【課題】能動サスペンションと能動スタビライザとを有する車輌に於いて、車輪接地荷重の配分制御に能動サスペンションと能動スタビライザとを同時に協調作動させ、能動サスペンションおよび能動スタビライザのいずれについても、その作動性能および耐久性を最大限に発揮させる車輌を提供する。
【解決手段】各車輪について能動サスペンションおよび能動スタビライザのそれぞれの制御により得られる許容車輪接地荷重の最大値を推定し、各車輪の目標接地荷重を能動サスペンションおよび能動スタビライザが各々の許容車輪接地荷重最大値の相対比に応じた車輪接地荷重にて分担するようにする。
(もっと読む)
車高調整装置
【課題】車高調整が行われる場合において、車体の移動方向に物体が存在する可能性を早期に検出する。
【解決手段】車両の設定領域内に物体が存在することが検出された場合には、車体の移動方向に物体が存在する可能性があるとされる。車高調整が開始される以前に、車両の設定領域内に物体が存在することが検出された場合(S5の判定がYES)には、車高調整が開始されることがない。また、車高調整中に設定領域内に物体が存在することが検出された場合(S9の判定がYES)には、車高調整が中止させられる(S17)。それによって、車高調整において、車体や物体が損傷することを良好に回避することができる。
(もっと読む)
姿勢制御装置および姿勢制御方法
【課題】 低速で段差を乗り越える時の車両における乗り心地を向上することである。
【解決手段】 車両Vにおける車体姿勢を制御する姿勢制御装置において、車両Vの各バネ上部材B1,B2,B3,B4と各バネ下部材W1,W2,W3,W4との間の四箇所に夫々介装されるアクチュエータA1,A2,A3,A4を具備し、いずれか1つバネ上部材B1,B2,B3,B4へ伝達される力f1の入力に対し、そのバネ上部材B1に対し対角に位置するバネ上部材B3とバネ下部材W3との間に介装されたアクチュエータA3に上記力f1と同方向の制御力F3を出力させるとともに、それ以外のバネ上部材B2,B4とバネ下部材W2,W4との間に介装されたアクチュエータA2,A4に上記力f1と逆方向の制御力F2,F4を出力させる。
(もっと読む)
車輌のロール剛性制御装置
【課題】前輪及び後輪の横力発生の余裕度合に応じて前後輪ロール剛性配分比を制御することにより、従来に比して車輌の旋回限界を向上させる。
【解決手段】前輪の横力発生の余裕度合Af及び後輪の横力発生の余裕度合Arが演算され(S20)、余裕度合Af及びArの差を低減するための前輪の目標ロール剛性配分比Rsdが演算され(S70)、前輪の最終目標ロール剛性配分比Rsdtが演算され(S80、90)、車輌の横加速度Gyに基づき目標アンチロールモーメントMatが演算され(S100)、最終目標ロール剛性配分比Rsdtにて目標アンチロールモーメントMatを達成するための前輪及び後輪の目標アンチロールモーメントMaft、Martが演算され(S110)、目標アンチロールモーメントMaft、Martが達成されるようアクティブスタビライザ装置16及び18が制御される(S120、130)。
(もっと読む)
1 - 18 / 18
[ Back to top ]