
Fターム[3D301BA12]の内容
Fターム[3D301BA12]に分類される特許
1 - 14 / 14
作業機械
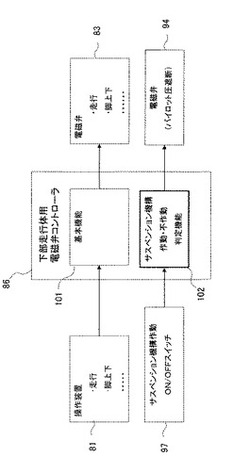
【課題】下部走行体に4つ以上の上下位置を自由に調整可能な走行ユニットを備えた作業機械において、走行安定性を向上させるとともに、作業時の操作性・居住性を維持できる。
【解決手段】作業機械はサスペンション機構91〜93とサスペンション機構作動切替手段94,97,102とを備える。走行時は、サスペンション機構作動ON/OFFスイッチ97をONにすることにより、サスペンション機構が自動的にクローラユニット224aを接地させ、走行安定性を向上させることができる。フロント作業時は、サスペンション機構作動ON/OFFスイッチ97をOFFにすることにより、パイロットチェックバルブ92a,93aへのパイロット圧は遮断され、パイロットチェックバルブ92a,93aはアキュームレータ91aからの圧油の流れを許容せず、サスペンション機構が不作動となり、フロント作業時の操作性・居住性を維持できる。
(もっと読む)
車両用サスペンション装置およびこれを備えた車両

【課題】乗り心地および走破性を確保しつつ、主砲の命中精度を確保するサスペンション装置およびこれを備えた車両を提供することを目的とする。
【解決手段】車両側取付け位置における上下方向の絶対速度である取付け位置上下絶対速度と、走行車輪に対する車両側取付け位置の相対速度との積v・α’が閾値を超えた場合に減衰要素の減衰力を大きく設定し、積v・α’が閾値を下回った場合には減衰力を小さく設定する車両用サスペンション装置であって、取付け位置上下絶対速度vを、車両本体が上下方向に動揺する際の車両本体上下速度vと、車両本体がピッチ方向に動揺する際の車両本体のピッチ中心から車両側取付け位置までの距離Lpとピッチによる車両本体の角速度ωpとの積であるピッチ上下速度Lp・ωpとの和で与えるとともに、ピッチ上下速度Lp・ωpを、車両本体上下速度vよりも大きく重み付けするように切替可能とされていることを特徴とする。
(もっと読む)
車両懸架装置
【課題】本発明は、車両懸架装置に関し、例えば不整地や山野における傾斜地で使用される運搬車や作業車に最適に使用されるものである。
【解決手段】前部台車フレーム2を有する前部台車1と、後部台車フレーム4を有する後部台車3と、前部台車フレームと後部台車フレームとを回動可能に枢着するために垂直方向Xに配した第1の枢軸材5と、少なくとも前部台車のフロント・アクスル6に前部台車フレームを左右に揺動可能に枢着する中央軸線M上に水平に配した第2の枢軸材7と、フロント・アクスル6と前部台車フレームとの間に第2の枢軸材7を中心にして予め圧縮状態で介装された左右のスプリングS1,S2とを備えている。
(もっと読む)
不整地用走行車両
【課題】走行部2a,2b,3a,3bの移動抵抗を低減でき、且つ走行部2a,2b,3a,3bの接地圧を確保できるものでありながら、走行部2a,2b,3a,3bの目標姿勢の演算が発散するのを防止できるようにした不整地用走行車両を提供するものである。
【解決手段】前側走行部3a,3bを有する左右の前走行機体31と、後側走行部2a,2bを有する左右の後走行機体31と、左右の前後走行機体31に作業機体4を支持する脚機構5a,5bとを備えてなる走行車両において、前記脚機構5a,5bの関節のうち、地面に押付けられた関節8a,8b,9a,9bの折曲げ角度を検出する角度センサ57a,57b,61a,61bを備え、前記角度センサ57a,57b,61a,61bの検出結果に基づき、前側走行部3a,3bの前端側と後側走行部2a,2bの後端側が着地しているときの地面の傾斜角度を算出するように構成したものである。
(もっと読む)
作業車両
【課題】前輪を、操向可能かつ左右個別に車両上下方向で揺動可能にするとともに、フロントサスペンションを簡単な構成にし、走行性および作業性を向上させた作業車両を提供する。
【解決手段】前輪駆動軸101は、自在軸継手108,110を介して前輪23に連結するとともに、自在軸継手108,110は、フロントアクスルケース19と、左右前輪23とのそれぞれの間であって、車両の外側近傍および内側近傍に備え、車両の外側近傍に設けた自在軸継手110は、支持部114を内臓した曲折部材110からなるとともに、左右前輪23の支持ケース103から車両内側に延設した上下に備えるステーステー104a,104bのそれぞれに、球面ジョイント106a,106bを着脱自在に設ける。
(もっと読む)
電気自動車の走行装置
【課題】 車輪の径を小さくすることによって床面を低くし、かつ、重心を低くして車両の走行安定性を向上させると共に、段差等に遭遇した場合にも、段差等を容易に乗り越えることができる電気自動車の走行装置を提供する。
【解決手段】 少なくとも前輪にタンデムホイールを備えた電気自動車の走行装置において、タンデムホイールの前々輪2aの前部上方に、誘導車輪3からなる段差乗越え用誘導回転体を設け、かつこの誘導回転体を回転させる駆動装置としてのインホイールモータ8を備えた。
(もっと読む)
キャブマウント制御装置、キャブマウント制御方法、建設機械
【課題】 キャブにピッチングが生じた場合でも、操作性を良好に維持できるキャブマウント制御装置、キャブマウント制御方法、および建設機械を提供すること。
【解決手段】建設機械のキャブを4点支持する可変減衰キャブマウント30用のキャブマウント制御装置50を、キャブ3の状態変化を検出する加速度センサ51と、この状態変化検出手段51での検出結果に基づいてキャブ3のピッチング、ローリング、および上下方向の状態量を推定する状態量推定手段56と、この状態量推定手段56での推定結果に基づいて4つのキャブマウント30で生じさせる減衰力を演算する減衰力演算手段57とを備えて構成し、この減衰力演算手段57は、少なくともキャブ3が前後方向に振られる時に、キャブ3の前方側を支持する2つのキャブマウント30の減衰力を、後方側を支持する2つのキャブマウント30の減衰力よりも大きくなるように演算する。
(もっと読む)
ローリングフロントサスペンション
【課題】傾斜地を水平方向に走行する為に、フロントアクスルを傾けて走行できる雪上車を提供する。
【解決手段】車体2前部のフレームに配されたスピンドルシャフト17にローリング式フロントアクスル14を配し、可倒式ハンドルポスト15がハンドル4を介して、ハンドル4を前後方向に対し左右に倒す事により、クロスジョイントギヤーシャフト16がフロントアクスルギヤー20を左右に駆動させて、フロントアクスル14全体が、スピンドルシャフト17を介し、回転することによりローリング式フロントサスペンション14は左右両端のスキー5L、5Rが上下駆動する構造を持っている。傾斜地水平方向で車体を水平に保つことが出来、さらに左右一対のスキー5L、5Rは傾斜地水平方向の傾斜面に対して平行に接地している事から、傾斜地水平方向を水平走行する際、谷方向へのローリングを抑え走行することが出来る事を特徴とする。
(もっと読む)
キャブマウント制御装置、キャブマウント制御方法、建設機械
【課題】 定常的な振動を確実に吸収し、かつキャブの揺れをも確実に抑制できるキャブマウント制御装置、キャブマウント制御方法、建設機械を提供すること。
【解決手段】建設機械のキャブを支持する可変減衰キャブマウント30用のキャブマウント制御装置50を、キャブの状態変化を検出する状態変化検出手段51と、この状態変化検出手段51での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段59と、定常成分が分離された検出結果に基づいてキャブマウントで生じさせる減衰力を演算する減衰力演算手段57とを備えて構成した。
(もっと読む)
作業車の姿勢制御装置
【課題】 検出誤差の少ない状態で精度よく車体の左右傾斜角を検出して、姿勢変更操作手段による車体の左右傾斜方向での作動制御を良好に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 車体の左右傾斜角を検出する左右傾斜角検出手段SKが、重力式の傾斜角センサ45と、左右傾斜方向での角速度を検出する角速度センサ46と、車体の左右傾斜角を求める傾斜角算出手段300とを備えて構成され、角速度が零である状態に対応する前記角速度の基準値を更新する基準値更新手段500が、旋回状態検出手段にて旋回走行状態でないことが検出されているときは、角速度センサ46の検出値をサンプリングした複数の検出値を平均処理した値に基づいて基準値を更新し、且つ、旋回状態検出手段にて旋回走行状態であることが検出されているときは基準値の更新を実行しない。
(もっと読む)
作業車の姿勢制御装置
【課題】 直進走行状態及び旋回走行状態のいずれの状態においても、車体の左右傾斜角を適切に検出することができ、車体の左右傾斜角が設定傾斜角に維持されるように姿勢変更操作手段を制御することを適切に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 車体の左右傾斜角を検出する左右傾斜角検出手段SKが、重力の作用によって車体の左右傾斜角を検出する重力式の傾斜角センサ45と、車体の左右傾斜方向での角速度を検出する角速度センサ46とを備えて、旋回走行状態でないことが検出されているときは、傾斜角センサ45及び角速度センサ46の夫々の検出値に基づいて車体の左右傾斜角を求め、旋回走行状態であることが検出されているときは、傾斜角センサ45の検出値に基づいて車体の左右傾斜角を求める傾斜角算出手段300を備える。
(もっと読む)
フロントサスペンションアーム
【課題】 走行路に露出した物に衝突し難くなるとともに、前方からの衝撃力に対する強度が大きくなるフロントサスペンションアームを提供すること。
【解決手段】 スノーモービルSMの車体10における前部側部分の両側部と、車体10の前部側部分の両側部下方にそれぞれ設置される操舵用スキー23との間にフロントサスペンションアーム20aを設けた。そして、このフロントサスペンションアーム20aにおけるスノーモービルSMの前後方向から見た状態での形状を、上部側部分が突出し下部側が凹むように湾曲した形状にした。また、フロントサスペンションアーム20aにおける車体10側部分を略直線状にし、操舵用スキー23側部分を湾曲させた。さらに、フロントサスペンションアーム20aの車体10の幅方向に直交する断面の形状を、上下方向の長さよりも前後方向の長さの方が長い楕円形に設定した。
(もっと読む)
装軌全地勢走行車
【課題】 特定運転状況に対する車両のバランスを適合させるべく、運転者の移動を可能にする装軌ATVを提供することにある。
【解決手段】本発明は、内燃機関により駆動される1対の平行無限軌道(5)により完全に支持され、駆動されかつ操舵される装軌ATVに関する。ステアリング手段(15)は、両軌道(5)間の差動を制御して車両を操舵するように構成されている。ハンドルバー(15)が運転者シート(16)の前方で車両ボディ(1)に枢着されており、ハンドルバー(15)を旋回することにより車両の操舵を行う。本発明の他の態様によれば、運転者シート(16)は跨座式シートであり、フットレスト(9)が、このシート(16)の左側および右側でボディ(1)に配置されており、該フットレスト(9)は、軌道(5)の上方走行部(11)と下方走行部(10)との間の垂直方向位置にある。
(もっと読む)
農作業車の姿勢制御装置
【課題】 姿勢変化速度が低い場合には機体本体の姿勢が不安定になることがなく姿勢変更操作を安定した状態で行うことができ、しかも、姿勢変化速度が高くて急激に姿勢が変化したような場合における姿勢修正動作の追従性の向上を図ることが可能となる農作業車の姿勢制御装置を提供する。
【解決手段】 機体本体Vの傾斜角が設定傾斜角から外れたときに姿勢変化速度が設定値未満であれば、機体本体Vにおける一端側箇所及び他端側箇所のうちの一方を昇降停止して、他方を機体本体Vの傾斜角が設定傾斜角になるように昇降させるべく、複数の駆動手段C2〜C5の一部を作動させ、且つ、姿勢変化速度が設定値以上であれば、前記一端側箇所及び前記他端側箇所を同時に昇降させるべく、前記複数の駆動手段C2〜C5を夫々作動させる。
(もっと読む)
1 - 14 / 14
[ Back to top ]