
キャブマウント制御装置、キャブマウント制御方法、建設機械
【課題】 定常的な振動を確実に吸収し、かつキャブの揺れをも確実に抑制できるキャブマウント制御装置、キャブマウント制御方法、建設機械を提供すること。
【解決手段】建設機械のキャブを支持する可変減衰キャブマウント30用のキャブマウント制御装置50を、キャブの状態変化を検出する状態変化検出手段51と、この状態変化検出手段51での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段59と、定常成分が分離された検出結果に基づいてキャブマウントで生じさせる減衰力を演算する減衰力演算手段57とを備えて構成した。
【解決手段】建設機械のキャブを支持する可変減衰キャブマウント30用のキャブマウント制御装置50を、キャブの状態変化を検出する状態変化検出手段51と、この状態変化検出手段51での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段59と、定常成分が分離された検出結果に基づいてキャブマウントで生じさせる減衰力を演算する減衰力演算手段57とを備えて構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、キャブマウント制御装置、キャブマウント制御方法、およびそのようなキャブマウント制御装置を備えた建設機械に関する。
【背景技術】
【0002】
従来、不整地で作業するブルドーザやパワーショベル等の建設機械は、走行装置が取り付けられる車体フレーム上に運転・操作用のキャブが設けられている。このキャブは、一般の車両に比べて車体フレーム側から伝搬する外力が大きく、それに伴う振動が激しいので、制振装置として機能するキャブマウントを介在させて車体フレームに装着されている。
【0003】
そして、キャブを支持するキャブマウントとしては、いわゆる液体封入マウントと呼ばれるものが知られている。液体封入マウントは、例えば、シリコーンオイル等の粘性流体が封入された容器内に摺動自在に可動体を設け、この可動体の往復動に伴って変形するコイルバネ等の弾性体を一体化した構成を有している。また、液体封入マウントは、建設機械の車体フレーム側にマウント本体が装着され、可動体がキャブ側に取り付けられ、車体フレームに作用した振動は、弾性体で吸収されるとともに、可動体の往復動によって粘性流体が攪拌されることにより、弾性体の復元力により生じるキャブの振動を速やかに減衰することができる。
【0004】
一方、近年、液体封入マウントとして粘性流体に磁性流体や電気粘性流体を用いた減衰力可変式のものが提案されている(例えば、特許文献1、特許文献2参照)。
磁性流体および電気粘性流体は、その近傍で磁気や電気を流すと粘性が変化するという特性を有し、容器内の粘性流体の粘性を振動の程度に応じて変化させることにより、減衰力を可変にして制振特性を制御できるという利点を有する。
【0005】
【特許文献1】特開平7−164877号公報
【特許文献2】特開2002−372095号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、例えば、ブルドーザの走行装置には、複数のシューをリンクおよびピンにて連結した履帯が用いられている。この履帯を構成するリンクは、走行中においてアイドラに差し掛かると、所定の一部分がアイドラの外周で保持される。この時、地面と接する際の抵抗により、接触面に滑りが生じ、当初平坦に形成されていたリンクの接触面は、走行を長期にわたって繰り返すことにより、前述した一部分がアイドラの外周になぞられるように摩耗し、周囲の摩耗部分に比して段付状に窪んでしまう(段付摩耗)。同様なことが、トラックローラでも生じる。そして、この摩耗面上をトラックローラが転動することで、ごつごつとした振動が生じ、キャブに伝達されることになる。
【0007】
このような振動は、走行中において比較的速い周期で定常的に生じるのであるが、減衰力可変式のキャブマウントを使用した場合、振動によるキャブの揺れを抑える目的で減衰力を大きくしたのでは、キャブマウントが硬くなってごつごつ感がオペレータに伝わってしまい、乗り心地を阻害する。そこで、そのような振動が生じている間は、キャブマウントの減衰力を小さく維持して振動を柔らかく吸収しつつ、他の振動に対しては、減衰力を速やかに大きくしてキャブの揺れを抑制するといった制御が望まれる。
【0008】
本発明の目的は、定常的な振動を確実に吸収し、かつキャブの揺れをも確実に抑制できるキャブマウント制御装置、キャブマウント制御方法、建設機械を提供することにある。
【課題を解決するための手段】
【0009】
本発明の請求項1に係るキャブマウント制御装置は、キャブを少なくとも3点で支持する可変減衰キャブマウントを制御するためのキャブマウント制御装置であって、前記キャブの状態変化を検出する状態変化検出手段と、この状態変化検出手段での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段と、前記定常成分が分離された検出結果に基づいて前記キャブマウントで生じさせる減衰力を演算する減衰力演算手段とを備えていることを特徴とする。
ここで、「高周波」とは、キャブの共振周波数の21/2倍以上の周波数をいう。以下においても同様である。
【0010】
本発明の請求項2に係るキャブマウント制御方法は、キャブを少なくとも3点で支持する可変減衰キャブマウントを制御するためのキャブマウント制御方法であって、前記キャブの状態変化を検出し、この検出結果に含まれる高周波の定常成分を分離し、前記定常成分が分離された検出結果に基づいて前記キャブマウントで生じさせる減衰力を演算することを特徴とする。
【0011】
本発明の請求項3に係る建設機械は、請求項1に記載のキャブマウント制御装置が搭載されていることを特徴とする。
【発明の効果】
【0012】
以上において、請求項1ないし請求項3の発明によれば、キャブの状態変化の検出結果から高周波の定常成分を分離して除くので、例えば、背景技術で述べた段付摩耗により、定常的に振動が生じている場合には、検出結果から得られる振動全体の成分から段付摩耗に係る成分のみが除かれることになり、段付摩耗による振動に対応した減衰力の演算が行われず、キャブマウントを硬くするような制御が行われない。従って、キャブマウントを何ら制御しない時の減衰力を比較的小さめに設定しておけば、段付摩耗等による振動が生じている間においては、その振動が確実に吸収される。
一方で、定常成分以外の成分に対しては、減衰力の演算を行って制御するから、段付摩耗以外の振動によってキャブが揺れた場合には、揺れに応じた減衰力でキャブマウントを硬くすればよく、揺れが確実に抑制される。
なお、振動全体の成分からは、キャブの共振周波数の21/2倍以上の定常成分が除かれるので、共振周波数に近い成分の振動に対しては減衰力を演算することになり、キャブの共振による揺れを抑制する。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は、本実施形態に係るブルドーザ(建設機械)1の概略外観を示す側面図、図2、図3は、ブルドーザ1に設けられたキャブ3およびこれを支持するキャブマウント30を模式的に示す側面図、平面図である。図4は、キャブマウント30を制御するためのキャブマウント制御装置(以下、単に制御手段と称する)50を示すブロック図である。
【0014】
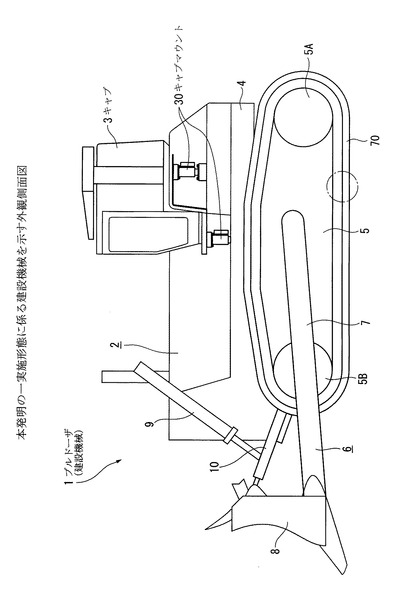
ブルドーザ1は、掘削、運土、散土、盛土等の作業を行う建設機械であり、車体2、および車体2上に設けられたキャブ3を備えて構成されている。車体2は、車体フレーム4、走行装置5、作業機6を備えている。キャブ3は、4つのキャブマウント30を介して車体フレーム4に4点支持されている。なお、キャブ3の支持点数は3点以上であればよく、4点支持に限定されない。
【0015】
車体フレーム4は、図示しないエンジンが搭載される部分であり、このエンジンの後方側にキャブ3が設けられている。走行装置5は、車体フレーム4の下部の両側に設けられたクローラ式であって、履帯70を備えている。走行装置5の後方側には駆動用のスプロケット5Aが設けられ、前方側にはアイドラ5Bが設けられ、履帯70がスプロケット5Aおよびアイドラ5Bに巻回されているのである。作業機6は、掘削、盛土等の作業を行う部分であり、フレーム7、ブレード8、リフトシリンダ9、およびチルトシリンダ10を備えている。
【0016】
フレーム7は、走行装置5の両側から走行方向前方に延びるアーム状部材であり、揺動自在に設けられている。ブレード8は、ブルドーザ1を走行させた際、土砂等が当たる部分であり、フレーム7の先端部分に設けられている。リフトシリンダ9は、ブレード8を上下させるための油圧アクチュエータであり、チルトシリンダ10は、ブレード8の幅方向の傾斜を変化させる油圧アクチュエータである。
【0017】
キャブマウント30は、図3に示すように、ブルドーザ1の走行方向の前方両側(左右両側)に2箇所、走行方向の後方両側(左右両側)に2箇所、合計4箇所に設けられている。前方側に設けられたキャブマウント30は、互いに左右方向に大きく離れた位置で、車体フレーム4およびキャブ3の補助フレーム3Aに対してゴムブッシュを介して固定され、後方側に設けられたキャブマウント30は、前方側よりも高い位置(ハイマウント)で、例えば、マウントの上端、下端にゴムブッシュを介して固定されている。
【0018】
また、キャブマウント30は減衰力を変化させることができる可変減衰キャブマウントであり、本実施形態では、構成の詳細な説明を省略するが、磁性流体を用いたタイプである。すなわち、図2に基づいて簡略化して説明すると、キャブマウント30は、車体フレーム4側に支承されたシリンダ31と、シリンダ31に対して進退自在に設けられ、かつ上端がキャブ3に固定された可動部材32とを備え、可動部材32の下端側が振動吸収用のコイルバネ33で受けられている。
【0019】
シリンダ31内のヘッド側およびボトム側の空間内には前述した磁性流体が封入されており、各空間を行き来するための連通路で磁性流体に磁界をかけると、磁性流体の剪断力が変化し、ダンパとして機能する際の減衰力を変えることが可能である。シリンダ31の外周側に模式的に図示した励磁コイル34は、後述する制御手段50からの電流信号によって磁界を生じさせるものである。
【0020】
ただし、本発明に用いられる可変減衰キャブマウントとしては、本実施形態のような磁性流体を用いたものに限定されず、電気粘性流体を用いるタイプ、ヘッド側およびボトム側の空間を連通させる連通路の断面積を可変にし、よって減衰力を変化させる可変オリフィスタイプなど、任意の構造のものを採用できる。
【0021】
制御手段50は、図4に示すように、加速度センサ(状態変化検出手段)51と、入出力部52と、演算部53とを備え、入出力部52および演算部53がMPU等で構成されている。さらに、入出力部52は、加速度信号入力手段54、電流信号生成手段58を備え、演算部53が、モード分離手段55、状態量推定手段56、減衰力演算手段57、および定常成分分離手段59を備えている。この定常成分分離手段59については、図6ないし図8を参照して後述する。
【0022】
加速度センサ51は、図2、図3にも示すように、キャブ3内の前方中央、左後方、および右後方の3箇所にそれぞれ設けられ、キャブ3に揺れが生じた際に、各部位での上下方向の加速度を検出する。なお、本発明での状態変化検出手段としては、加速度センサ51の代わりにストロークセンサでもよいし、加速度センサ51にさらにストロークセンサを加えてもよいし、加速度センサやストロークセンサに代えてジャイロを用いてもよい。しかし、これらを使用することで、演算部53での演算を簡略化することができるが、耐久性およびコストの面では加速度センサ51のみの方がよく、制御上の面でも実用に足りる。
【0023】
加速度信号入力手段54は、加速度センサ51から出力された検出信号を入力し、所定の変換を行って演算部53に出力する機能を有している。
【0024】
モード分離手段55は、加速度信号入力手段54からの検出信号に基づき、キャブ3の重心位置(回転中心とは異なる)でのピッチ方向の加速度(ωpt)、ロール方向の加速度(ωrt)、およびバウンス方向の加速度(abt)を求める。各方向の加速度は、これらの重心回りの運動方程式から導き出すことが可能である。
【0025】
状態量推定手段56は、例えば、所定の加速度(ωpt,ωrt,abt)が生じた際のバネ下の動きを推定するカルマンフィルタを用い、状態量であるピッチ方向の相対速度(角速度)ωp、ロール方向の相対速度(角速度)ωr、およびバウンス方向の相対変位(角度)Zを算出することができる。
【0026】
減衰力演算手段57は、ピッチ、ロール、バウンスに必要な減衰力に基づき、各キャブマウント30における減衰力f1,f2,f3,f4を算出する。
【0027】
電流信号生成手段58は、減衰力演算手段57で算出された減衰力f1〜f4に応じた電流信号を生成し、各キャブマウント30の励磁コイル34に出力することになる。
【0028】
ところで、ブルドーザ1の走行装置5では、履帯70を長期にわたって使用すると、履帯70に段付摩耗が生じる。具体的に、履帯70は、図1での下側での一部(図1中の囲み円付近)を図5に拡大して示すように、外側に突出したグローサ71Aを有するシュー71と、シュー71の内側にシューボルト71Bおよびシューナット71Cで固定されたリンク72とを備えている。リンク72は、履帯70の幅方向(図6の紙面表裏方向)に一対設けられるのであるが、ここでは一つのみを図示してある。そして、移動方向に沿った複数のリンク72同士を図示しないピンにより連結することで、一連の履帯70が形成される。リンク72に穿設された一対の丸孔開口72A,72Bは、ピン挿入用であり、隣接するリンクとの結合を考慮して、幅方向の位置がオフセットされている。
【0029】
リンク72の図中の上面72Cは、図示しないトラックローラ(T/R)の転動面であり、また、アイドラ5Bと接触する接触面でもあり、走行を長期にわたって繰り返すことで、二点鎖線で示す位置から図示のように段付状に摩耗する。図中の矢印Aで示す部分が段付摩耗した部分であり、段付摩耗は履帯70の全てのリンク72に略一様に発生する。従って、このような面をトラックローラが転動すると、それぞれの段付摩耗部分を通過する度に振動が生じることになる。つまり、高周波の振動が定常的に生じるのである。このような振動に対しても、制御手段50にて減衰力f1〜f4を算出し、各キャブマウント30を硬めに制御すると、かえってごつごつ感がオペレータに伝わってしまい、乗り心地を阻害する。
【0030】
そこで、本実施形態の制御装置50において、演算部53のモード分離手段55と状態量推定手段56との間には、定常成分分離手段59が設けられている。この定常成分分離手段59は、キャブ3で生じる振動全体の成分から、履帯70での段付摩耗が原因とされる高周波の定常的な成分を除去し、この定常的に生じる振動に対しては、状態量推定手段56以下での処理を行わないようにしている。
【0031】
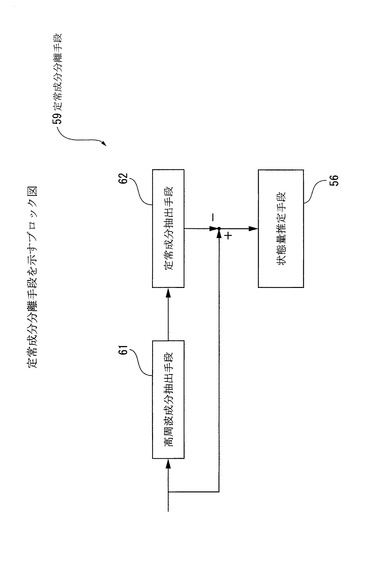
定常成分分離手段59は、図6に示すように、高周波成分抽出手段61および定常成分抽出手段62により構成されており、各手段61,62で抽出された成分が高周波の定常的な成分とされ、この定常成分は分離、除去される。
【0032】
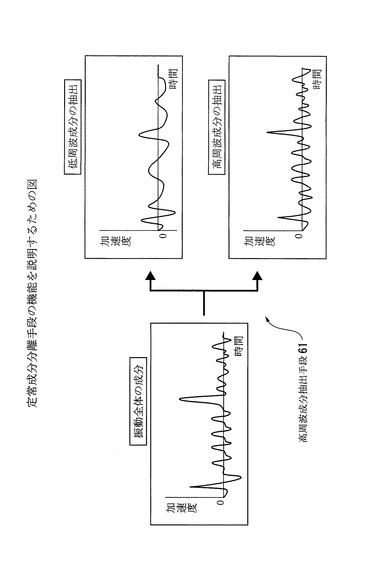
高周波成分抽出手段61は、図7に示すように、モード分離手段55(図4)で分離された各モードについて、キャブ3に作用した振動全体の成分(本実施形態では、加速度として与えられる)から低周波成分と高周波成分とを抽出し、互いを分離する。このような抽出および分離は、一般的なローパスフィルタ等によって行われる。
【0033】
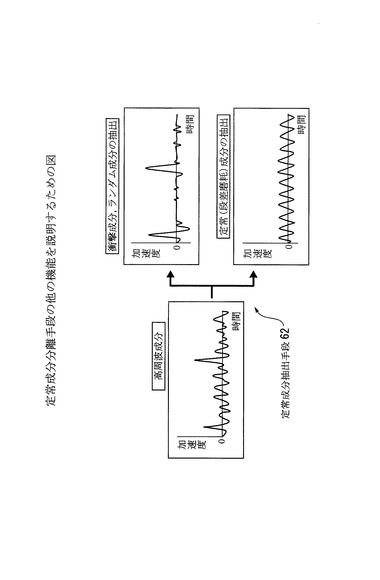
定常成分抽出手段62は、図8に示すように、高周波成分からさらに定常成分を抽出し、他の成分を分離する。ここでは、例えば、高周波成分を高速フーリエ変換することで、定常的な振動成分を抽出し、残りを他の衝撃、ランダム成分とすることができる。定常成分以外の振動成分は、地形の不連続性から生じる場合が多く、抽出された後に状態量推定手段56に出力される。この後、減衰力演算手段57が減衰力f1〜f4を算出し、キャブ3の揺れを抑制する。そして、定常成分は状態量推定手段56には出力されず、制御対象から除かれる。
【0034】
このような本実施形態によれば、以下の効果がある。
すなわち、ブルドーザ1において、キャブマウント30を制御する制御手段50には、定常成分分離手段59が設けられており、キャブ3の状態変化の検出結果からは、段付摩耗による振動から生じた高周波の定常成分が分離されるので、段付摩耗による振動に対応した減衰力f1〜f4の演算を行わずに済ますことができ、キャブマウント30を硬くするような制御を行わないようにできる。従って、キャブマウント30の減衰力は、コイルバネ33自身のバネ特性に依存した小さいものにでき、段付摩耗等による振動が生じている間においては、その振動をコイルバネ33で確実に吸収できる。
【0035】
一方で、定常成分以外の成分に対しては、減衰力f1〜f4の演算を行って制御するから、段付摩耗以外の振動によってキャブ3が揺れた場合には、揺れに応じた減衰力f1〜f4でキャブマウント30を硬くすればよく、揺れを確実に抑制できる。
【0036】
特に、定常成分分離手段59の定常成分抽出手段62によれば、キャブ3の共振周波数の21/2倍以上の定常成分が段付摩耗による成分として限定的に除かれ、キャブ3の共振周波数に近い成分が抽出されるので、抽出された成分に基づいて減衰力f1〜f4を演算することにより、キャブ3の共振による揺れを防止できる。
【0037】
前記実施形態では、高周波の定常的な振動が段付摩耗によって生じるものとして説明したが、例えば、エンジンが駆動している時の振動も同様に扱うことができる。従って、エンジン駆動時の振動に対しても、本発明を適用することにより、キャブマウント30の減衰力を必要以上に硬くせず、そのような振動を確実に吸収できるのである。勿論、その他の定常的に生じる任意の振動に対して、本発明を適用してもよい。
【産業上の利用可能性】
【0038】
本発明は、ブルドーザやパワーショベルといった履帯で走行する建設機械の他、エンジンを搭載したあらゆる建設機械、さらには輸送用トラック等にも適用できる。
【図面の簡単な説明】
【0039】
【図1】本発明の一実施形態に係る建設機械を示す外観側面図。
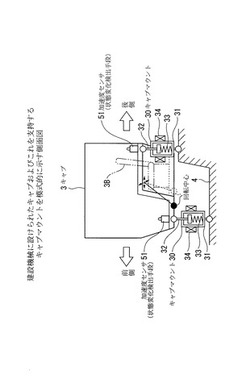
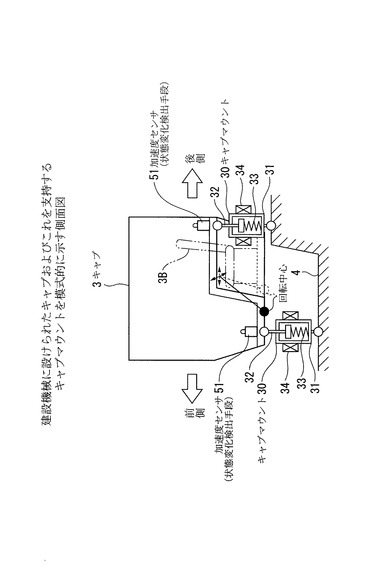
【図2】前記建設機械に設けられたキャブおよびこれを支持するキャブマウントを模式的に示す側面図。
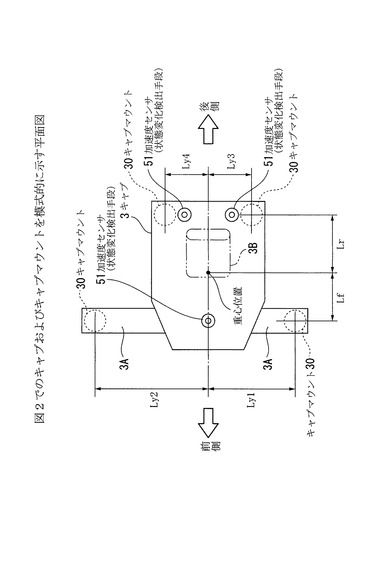
【図3】図2でのキャブおよびキャブマウントを模式的に示す平面図。
【図4】キャブマウント制御手段(装置)を示すブロック図
【図5】履帯の構成部材を示す側面図。
【図6】定常成分分離手段を示すブロック図
【図7】定常成分分離手段の機能を説明するための図。
【図8】定常成分分離手段の他の機能を説明するための図。
【符号の説明】
【0040】
1…ブルドーザ(建設機械)、3…キャブ、30…キャブマウント、50…キャブマウント制御装置、51…加速度センサ(状態変化検出手段)、57…減衰力演算手段、59…定常成分分離手段、f1,f2,f3,f4…減衰力。
【技術分野】
【0001】
本発明は、キャブマウント制御装置、キャブマウント制御方法、およびそのようなキャブマウント制御装置を備えた建設機械に関する。
【背景技術】
【0002】
従来、不整地で作業するブルドーザやパワーショベル等の建設機械は、走行装置が取り付けられる車体フレーム上に運転・操作用のキャブが設けられている。このキャブは、一般の車両に比べて車体フレーム側から伝搬する外力が大きく、それに伴う振動が激しいので、制振装置として機能するキャブマウントを介在させて車体フレームに装着されている。
【0003】
そして、キャブを支持するキャブマウントとしては、いわゆる液体封入マウントと呼ばれるものが知られている。液体封入マウントは、例えば、シリコーンオイル等の粘性流体が封入された容器内に摺動自在に可動体を設け、この可動体の往復動に伴って変形するコイルバネ等の弾性体を一体化した構成を有している。また、液体封入マウントは、建設機械の車体フレーム側にマウント本体が装着され、可動体がキャブ側に取り付けられ、車体フレームに作用した振動は、弾性体で吸収されるとともに、可動体の往復動によって粘性流体が攪拌されることにより、弾性体の復元力により生じるキャブの振動を速やかに減衰することができる。
【0004】
一方、近年、液体封入マウントとして粘性流体に磁性流体や電気粘性流体を用いた減衰力可変式のものが提案されている(例えば、特許文献1、特許文献2参照)。
磁性流体および電気粘性流体は、その近傍で磁気や電気を流すと粘性が変化するという特性を有し、容器内の粘性流体の粘性を振動の程度に応じて変化させることにより、減衰力を可変にして制振特性を制御できるという利点を有する。
【0005】
【特許文献1】特開平7−164877号公報
【特許文献2】特開2002−372095号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、例えば、ブルドーザの走行装置には、複数のシューをリンクおよびピンにて連結した履帯が用いられている。この履帯を構成するリンクは、走行中においてアイドラに差し掛かると、所定の一部分がアイドラの外周で保持される。この時、地面と接する際の抵抗により、接触面に滑りが生じ、当初平坦に形成されていたリンクの接触面は、走行を長期にわたって繰り返すことにより、前述した一部分がアイドラの外周になぞられるように摩耗し、周囲の摩耗部分に比して段付状に窪んでしまう(段付摩耗)。同様なことが、トラックローラでも生じる。そして、この摩耗面上をトラックローラが転動することで、ごつごつとした振動が生じ、キャブに伝達されることになる。
【0007】
このような振動は、走行中において比較的速い周期で定常的に生じるのであるが、減衰力可変式のキャブマウントを使用した場合、振動によるキャブの揺れを抑える目的で減衰力を大きくしたのでは、キャブマウントが硬くなってごつごつ感がオペレータに伝わってしまい、乗り心地を阻害する。そこで、そのような振動が生じている間は、キャブマウントの減衰力を小さく維持して振動を柔らかく吸収しつつ、他の振動に対しては、減衰力を速やかに大きくしてキャブの揺れを抑制するといった制御が望まれる。
【0008】
本発明の目的は、定常的な振動を確実に吸収し、かつキャブの揺れをも確実に抑制できるキャブマウント制御装置、キャブマウント制御方法、建設機械を提供することにある。
【課題を解決するための手段】
【0009】
本発明の請求項1に係るキャブマウント制御装置は、キャブを少なくとも3点で支持する可変減衰キャブマウントを制御するためのキャブマウント制御装置であって、前記キャブの状態変化を検出する状態変化検出手段と、この状態変化検出手段での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段と、前記定常成分が分離された検出結果に基づいて前記キャブマウントで生じさせる減衰力を演算する減衰力演算手段とを備えていることを特徴とする。
ここで、「高周波」とは、キャブの共振周波数の21/2倍以上の周波数をいう。以下においても同様である。
【0010】
本発明の請求項2に係るキャブマウント制御方法は、キャブを少なくとも3点で支持する可変減衰キャブマウントを制御するためのキャブマウント制御方法であって、前記キャブの状態変化を検出し、この検出結果に含まれる高周波の定常成分を分離し、前記定常成分が分離された検出結果に基づいて前記キャブマウントで生じさせる減衰力を演算することを特徴とする。
【0011】
本発明の請求項3に係る建設機械は、請求項1に記載のキャブマウント制御装置が搭載されていることを特徴とする。
【発明の効果】
【0012】
以上において、請求項1ないし請求項3の発明によれば、キャブの状態変化の検出結果から高周波の定常成分を分離して除くので、例えば、背景技術で述べた段付摩耗により、定常的に振動が生じている場合には、検出結果から得られる振動全体の成分から段付摩耗に係る成分のみが除かれることになり、段付摩耗による振動に対応した減衰力の演算が行われず、キャブマウントを硬くするような制御が行われない。従って、キャブマウントを何ら制御しない時の減衰力を比較的小さめに設定しておけば、段付摩耗等による振動が生じている間においては、その振動が確実に吸収される。
一方で、定常成分以外の成分に対しては、減衰力の演算を行って制御するから、段付摩耗以外の振動によってキャブが揺れた場合には、揺れに応じた減衰力でキャブマウントを硬くすればよく、揺れが確実に抑制される。
なお、振動全体の成分からは、キャブの共振周波数の21/2倍以上の定常成分が除かれるので、共振周波数に近い成分の振動に対しては減衰力を演算することになり、キャブの共振による揺れを抑制する。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は、本実施形態に係るブルドーザ(建設機械)1の概略外観を示す側面図、図2、図3は、ブルドーザ1に設けられたキャブ3およびこれを支持するキャブマウント30を模式的に示す側面図、平面図である。図4は、キャブマウント30を制御するためのキャブマウント制御装置(以下、単に制御手段と称する)50を示すブロック図である。
【0014】
ブルドーザ1は、掘削、運土、散土、盛土等の作業を行う建設機械であり、車体2、および車体2上に設けられたキャブ3を備えて構成されている。車体2は、車体フレーム4、走行装置5、作業機6を備えている。キャブ3は、4つのキャブマウント30を介して車体フレーム4に4点支持されている。なお、キャブ3の支持点数は3点以上であればよく、4点支持に限定されない。
【0015】
車体フレーム4は、図示しないエンジンが搭載される部分であり、このエンジンの後方側にキャブ3が設けられている。走行装置5は、車体フレーム4の下部の両側に設けられたクローラ式であって、履帯70を備えている。走行装置5の後方側には駆動用のスプロケット5Aが設けられ、前方側にはアイドラ5Bが設けられ、履帯70がスプロケット5Aおよびアイドラ5Bに巻回されているのである。作業機6は、掘削、盛土等の作業を行う部分であり、フレーム7、ブレード8、リフトシリンダ9、およびチルトシリンダ10を備えている。
【0016】
フレーム7は、走行装置5の両側から走行方向前方に延びるアーム状部材であり、揺動自在に設けられている。ブレード8は、ブルドーザ1を走行させた際、土砂等が当たる部分であり、フレーム7の先端部分に設けられている。リフトシリンダ9は、ブレード8を上下させるための油圧アクチュエータであり、チルトシリンダ10は、ブレード8の幅方向の傾斜を変化させる油圧アクチュエータである。
【0017】
キャブマウント30は、図3に示すように、ブルドーザ1の走行方向の前方両側(左右両側)に2箇所、走行方向の後方両側(左右両側)に2箇所、合計4箇所に設けられている。前方側に設けられたキャブマウント30は、互いに左右方向に大きく離れた位置で、車体フレーム4およびキャブ3の補助フレーム3Aに対してゴムブッシュを介して固定され、後方側に設けられたキャブマウント30は、前方側よりも高い位置(ハイマウント)で、例えば、マウントの上端、下端にゴムブッシュを介して固定されている。
【0018】
また、キャブマウント30は減衰力を変化させることができる可変減衰キャブマウントであり、本実施形態では、構成の詳細な説明を省略するが、磁性流体を用いたタイプである。すなわち、図2に基づいて簡略化して説明すると、キャブマウント30は、車体フレーム4側に支承されたシリンダ31と、シリンダ31に対して進退自在に設けられ、かつ上端がキャブ3に固定された可動部材32とを備え、可動部材32の下端側が振動吸収用のコイルバネ33で受けられている。
【0019】
シリンダ31内のヘッド側およびボトム側の空間内には前述した磁性流体が封入されており、各空間を行き来するための連通路で磁性流体に磁界をかけると、磁性流体の剪断力が変化し、ダンパとして機能する際の減衰力を変えることが可能である。シリンダ31の外周側に模式的に図示した励磁コイル34は、後述する制御手段50からの電流信号によって磁界を生じさせるものである。
【0020】
ただし、本発明に用いられる可変減衰キャブマウントとしては、本実施形態のような磁性流体を用いたものに限定されず、電気粘性流体を用いるタイプ、ヘッド側およびボトム側の空間を連通させる連通路の断面積を可変にし、よって減衰力を変化させる可変オリフィスタイプなど、任意の構造のものを採用できる。
【0021】
制御手段50は、図4に示すように、加速度センサ(状態変化検出手段)51と、入出力部52と、演算部53とを備え、入出力部52および演算部53がMPU等で構成されている。さらに、入出力部52は、加速度信号入力手段54、電流信号生成手段58を備え、演算部53が、モード分離手段55、状態量推定手段56、減衰力演算手段57、および定常成分分離手段59を備えている。この定常成分分離手段59については、図6ないし図8を参照して後述する。
【0022】
加速度センサ51は、図2、図3にも示すように、キャブ3内の前方中央、左後方、および右後方の3箇所にそれぞれ設けられ、キャブ3に揺れが生じた際に、各部位での上下方向の加速度を検出する。なお、本発明での状態変化検出手段としては、加速度センサ51の代わりにストロークセンサでもよいし、加速度センサ51にさらにストロークセンサを加えてもよいし、加速度センサやストロークセンサに代えてジャイロを用いてもよい。しかし、これらを使用することで、演算部53での演算を簡略化することができるが、耐久性およびコストの面では加速度センサ51のみの方がよく、制御上の面でも実用に足りる。
【0023】
加速度信号入力手段54は、加速度センサ51から出力された検出信号を入力し、所定の変換を行って演算部53に出力する機能を有している。
【0024】
モード分離手段55は、加速度信号入力手段54からの検出信号に基づき、キャブ3の重心位置(回転中心とは異なる)でのピッチ方向の加速度(ωpt)、ロール方向の加速度(ωrt)、およびバウンス方向の加速度(abt)を求める。各方向の加速度は、これらの重心回りの運動方程式から導き出すことが可能である。
【0025】
状態量推定手段56は、例えば、所定の加速度(ωpt,ωrt,abt)が生じた際のバネ下の動きを推定するカルマンフィルタを用い、状態量であるピッチ方向の相対速度(角速度)ωp、ロール方向の相対速度(角速度)ωr、およびバウンス方向の相対変位(角度)Zを算出することができる。
【0026】
減衰力演算手段57は、ピッチ、ロール、バウンスに必要な減衰力に基づき、各キャブマウント30における減衰力f1,f2,f3,f4を算出する。
【0027】
電流信号生成手段58は、減衰力演算手段57で算出された減衰力f1〜f4に応じた電流信号を生成し、各キャブマウント30の励磁コイル34に出力することになる。
【0028】
ところで、ブルドーザ1の走行装置5では、履帯70を長期にわたって使用すると、履帯70に段付摩耗が生じる。具体的に、履帯70は、図1での下側での一部(図1中の囲み円付近)を図5に拡大して示すように、外側に突出したグローサ71Aを有するシュー71と、シュー71の内側にシューボルト71Bおよびシューナット71Cで固定されたリンク72とを備えている。リンク72は、履帯70の幅方向(図6の紙面表裏方向)に一対設けられるのであるが、ここでは一つのみを図示してある。そして、移動方向に沿った複数のリンク72同士を図示しないピンにより連結することで、一連の履帯70が形成される。リンク72に穿設された一対の丸孔開口72A,72Bは、ピン挿入用であり、隣接するリンクとの結合を考慮して、幅方向の位置がオフセットされている。
【0029】
リンク72の図中の上面72Cは、図示しないトラックローラ(T/R)の転動面であり、また、アイドラ5Bと接触する接触面でもあり、走行を長期にわたって繰り返すことで、二点鎖線で示す位置から図示のように段付状に摩耗する。図中の矢印Aで示す部分が段付摩耗した部分であり、段付摩耗は履帯70の全てのリンク72に略一様に発生する。従って、このような面をトラックローラが転動すると、それぞれの段付摩耗部分を通過する度に振動が生じることになる。つまり、高周波の振動が定常的に生じるのである。このような振動に対しても、制御手段50にて減衰力f1〜f4を算出し、各キャブマウント30を硬めに制御すると、かえってごつごつ感がオペレータに伝わってしまい、乗り心地を阻害する。
【0030】
そこで、本実施形態の制御装置50において、演算部53のモード分離手段55と状態量推定手段56との間には、定常成分分離手段59が設けられている。この定常成分分離手段59は、キャブ3で生じる振動全体の成分から、履帯70での段付摩耗が原因とされる高周波の定常的な成分を除去し、この定常的に生じる振動に対しては、状態量推定手段56以下での処理を行わないようにしている。
【0031】
定常成分分離手段59は、図6に示すように、高周波成分抽出手段61および定常成分抽出手段62により構成されており、各手段61,62で抽出された成分が高周波の定常的な成分とされ、この定常成分は分離、除去される。
【0032】
高周波成分抽出手段61は、図7に示すように、モード分離手段55(図4)で分離された各モードについて、キャブ3に作用した振動全体の成分(本実施形態では、加速度として与えられる)から低周波成分と高周波成分とを抽出し、互いを分離する。このような抽出および分離は、一般的なローパスフィルタ等によって行われる。
【0033】
定常成分抽出手段62は、図8に示すように、高周波成分からさらに定常成分を抽出し、他の成分を分離する。ここでは、例えば、高周波成分を高速フーリエ変換することで、定常的な振動成分を抽出し、残りを他の衝撃、ランダム成分とすることができる。定常成分以外の振動成分は、地形の不連続性から生じる場合が多く、抽出された後に状態量推定手段56に出力される。この後、減衰力演算手段57が減衰力f1〜f4を算出し、キャブ3の揺れを抑制する。そして、定常成分は状態量推定手段56には出力されず、制御対象から除かれる。
【0034】
このような本実施形態によれば、以下の効果がある。
すなわち、ブルドーザ1において、キャブマウント30を制御する制御手段50には、定常成分分離手段59が設けられており、キャブ3の状態変化の検出結果からは、段付摩耗による振動から生じた高周波の定常成分が分離されるので、段付摩耗による振動に対応した減衰力f1〜f4の演算を行わずに済ますことができ、キャブマウント30を硬くするような制御を行わないようにできる。従って、キャブマウント30の減衰力は、コイルバネ33自身のバネ特性に依存した小さいものにでき、段付摩耗等による振動が生じている間においては、その振動をコイルバネ33で確実に吸収できる。
【0035】
一方で、定常成分以外の成分に対しては、減衰力f1〜f4の演算を行って制御するから、段付摩耗以外の振動によってキャブ3が揺れた場合には、揺れに応じた減衰力f1〜f4でキャブマウント30を硬くすればよく、揺れを確実に抑制できる。
【0036】
特に、定常成分分離手段59の定常成分抽出手段62によれば、キャブ3の共振周波数の21/2倍以上の定常成分が段付摩耗による成分として限定的に除かれ、キャブ3の共振周波数に近い成分が抽出されるので、抽出された成分に基づいて減衰力f1〜f4を演算することにより、キャブ3の共振による揺れを防止できる。
【0037】
前記実施形態では、高周波の定常的な振動が段付摩耗によって生じるものとして説明したが、例えば、エンジンが駆動している時の振動も同様に扱うことができる。従って、エンジン駆動時の振動に対しても、本発明を適用することにより、キャブマウント30の減衰力を必要以上に硬くせず、そのような振動を確実に吸収できるのである。勿論、その他の定常的に生じる任意の振動に対して、本発明を適用してもよい。
【産業上の利用可能性】
【0038】
本発明は、ブルドーザやパワーショベルといった履帯で走行する建設機械の他、エンジンを搭載したあらゆる建設機械、さらには輸送用トラック等にも適用できる。
【図面の簡単な説明】
【0039】
【図1】本発明の一実施形態に係る建設機械を示す外観側面図。
【図2】前記建設機械に設けられたキャブおよびこれを支持するキャブマウントを模式的に示す側面図。
【図3】図2でのキャブおよびキャブマウントを模式的に示す平面図。
【図4】キャブマウント制御手段(装置)を示すブロック図
【図5】履帯の構成部材を示す側面図。
【図6】定常成分分離手段を示すブロック図
【図7】定常成分分離手段の機能を説明するための図。
【図8】定常成分分離手段の他の機能を説明するための図。
【符号の説明】
【0040】
1…ブルドーザ(建設機械)、3…キャブ、30…キャブマウント、50…キャブマウント制御装置、51…加速度センサ(状態変化検出手段)、57…減衰力演算手段、59…定常成分分離手段、f1,f2,f3,f4…減衰力。
【特許請求の範囲】
【請求項1】
キャブ(3)を少なくとも3点で支持する可変減衰キャブマウント(30)を制御するためのキャブマウント制御装置であって、
前記キャブ(3)の状態変化を検出する状態変化検出手段(51)と、
この状態変化検出手段(51)での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段(59)と、
前記定常成分が分離された検出結果に基づいて前記キャブマウント(30)で生じさせる減衰力を演算する減衰力演算手段(57)とを備えている
ことを特徴とするキャブマウント制御装置(50)。
【請求項2】
キャブ(3)を少なくとも3点で支持する可変減衰キャブマウント(30)を制御するためのキャブマウント制御方法であって、
前記キャブ(3)の状態変化を検出し、
この検出結果に含まれる高周波の定常成分を分離し、
前記定常成分が分離された検出結果に基づいて前記キャブマウント(30)で生じさせる減衰力を演算する
ことを特徴とするキャブマウント制御方法。
【請求項3】
建設機械において、
請求項1に記載のキャブマウント制御装置(50)が搭載されている
ことを特徴とする建設機械(1)。
【請求項1】
キャブ(3)を少なくとも3点で支持する可変減衰キャブマウント(30)を制御するためのキャブマウント制御装置であって、
前記キャブ(3)の状態変化を検出する状態変化検出手段(51)と、
この状態変化検出手段(51)での検出結果に含まれる高周波の定常成分を分離する定常成分分離手段(59)と、
前記定常成分が分離された検出結果に基づいて前記キャブマウント(30)で生じさせる減衰力を演算する減衰力演算手段(57)とを備えている
ことを特徴とするキャブマウント制御装置(50)。
【請求項2】
キャブ(3)を少なくとも3点で支持する可変減衰キャブマウント(30)を制御するためのキャブマウント制御方法であって、
前記キャブ(3)の状態変化を検出し、
この検出結果に含まれる高周波の定常成分を分離し、
前記定常成分が分離された検出結果に基づいて前記キャブマウント(30)で生じさせる減衰力を演算する
ことを特徴とするキャブマウント制御方法。
【請求項3】
建設機械において、
請求項1に記載のキャブマウント制御装置(50)が搭載されている
ことを特徴とする建設機械(1)。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−276497(P2007−276497A)
【公開日】平成19年10月25日(2007.10.25)
【国際特許分類】
【出願番号】特願2004−235522(P2004−235522)
【出願日】平成16年8月12日(2004.8.12)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
【公開日】平成19年10月25日(2007.10.25)
【国際特許分類】
【出願日】平成16年8月12日(2004.8.12)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
[ Back to top ]