
Fターム[3D301EC66]の内容
Fターム[3D301EC66]の下位に属するFターム
ローパスフィルタ (99)
ハイパスフィルタ (46)
バンドパスフィルタ (53)
フィルタ周波数の変更 (12)
Fターム[3D301EC66]に分類される特許
1 - 20 / 55
サスペンション制御装置
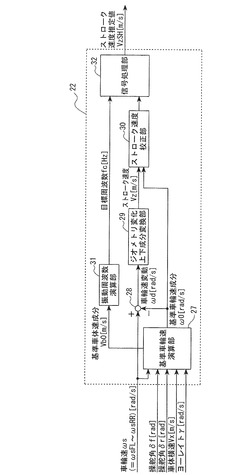
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させる際に、アンダーステア特性を得やすくする。
【解決手段】前輪における左右の輪荷重移動量が、後輪における左右の輪荷重移動量よりも大きくなるように、前側駆動モータ3f及び後側駆動モータ3rを駆動制御する。具体的には、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、リア回転角制御量の応答時間をフロント回転角制御量の応答時間よりも遅くする。又は、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、フロント回転角制御量の応答時間をリア回転角制御量の応答時間よりも早くする。
(もっと読む)
サスペンション装置
【課題】 高価なコントローラ、アクチュエータを用いることなく、車両走行時の低周波から高周波にわたる広い周波数域に対応した減衰力の制御を行う。
【解決手段】 左,右の前輪サスペンション4の緩衝器6と左,右の後輪サスペンション7の緩衝器9とを、周波数感応部24が付設された減衰力調整式油圧緩衝器(即ち、減衰力調整+周波数感応緩衝器)により構成する。緩衝器6,9に設ける減衰力可変機構17のアクチュエータ20をコントローラ37により駆動制御する。コントローラ37は、車体1側の上下振動が低周波のときに、その上下振動に応じて減衰力可変機構17(シャッタ18)による減衰力をソフトとハードとの間で可変に調整し、前記振動が前記低周波よりも高周波のときには、前記減衰力の調整制御を行わない構成としている。
(もっと読む)
能動型振動騒音制御装置
【課題】消音性能を向上させることが可能な能動型振動騒音制御装置を提供する。
【解決手段】いわゆる適応制御を用いるANC装置12では、前輪用サスペンション14aと後輪用サスペンション14bの特性の相違に基づく補正フィルタ76を用いて、前輪参照信号Sb又は後輪参照信号Sbd1を補正することで後輪打消音CSrを予測する。
(もっと読む)
車両制御システムおよび制御装置
【課題】乗り心地と操縦安定性とを両立して向上させることができる車両制御システムおよび制御装置を提供する。
【解決手段】車両の振動を吸収するばね剛性を変更するばね剛性変更装置と、車両の振動を減衰する減衰量を可変可能な減衰量変更装置と、車両に発生する振動のうち路面入力による振動を推定する路面入力振動推定部と、振動のうちドライバ操作による振動を推定するドライバ操作振動推定部と、ばね剛性変更装置を制御して路面入力による振動を吸収させ、減衰量変更装置を制御してドライバ操作による振動を減衰させる制御部と、を備えることで上記課題を解決する。
(もっと読む)
車体姿勢制御装置
【課題】車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】車両の旋回走行時におけるピッチレイトとロールレイトを比例関係にする制御を行うため、コントローラ13を、ゲイン16、判別部17、乗算部18、FF制御部19、差演算部20、FB制御部21、平均値演算部22、目標減衰力算出部23およびダンパ指令値算出部24により構成する。ロールレイトに比例した目標ピッチレイトを求め、左,右の前輪側と左,右の後輪側とに設けた減衰力可変ダンパ6,9の減衰力特性を、この目標ピッチレイトとなるように可変に制御して、車体に対してピッチモーメントを発生させる制御を行う構成としている。
(もっと読む)
車両
【課題】旋回性能を向上させることができるとともに、傾斜方向への外乱を受けたときにも、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪と、駆動部に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を検出する横加速度センサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、前記車体の傾斜方向への外乱を受けたとき、車体の傾斜角度の変化のうちの外乱による変化分を抽出し、抽出した外乱による変化分に対応する制御値を加えて、車体の傾斜を制御する。
(もっと読む)
ショックアブソーバ装置
【課題】電磁式ショックアブソーバの減速機の慣性の影響で乗り心地が悪化することを抑制する。
【解決手段】フィルタ処理部51は、誘起電圧の周波数とゲインとの関係を設定した周波数ゲイン特性を記憶しており、周波数ゲイン特性を使って、電圧センサにより検出した実誘起電圧Voutをフィルタ処理する。電圧比較部53は、フィルタ処理部51から出力されたフィルタ誘起電圧Vxと三角波発生部52から出力された三角波電圧Vrとを比較し、フィルタ誘起電圧Vxが三角波電圧Vrより大きくなる期間においてハイレベル信号を出力する。PWM制御信号出力部54は、ハイレベル信号を入力している期間において、スイッチング素子SW1,SW2をオン状態とする。
(もっと読む)
車両
【課題】車両を手押しで容易に走行させることができるようにする。
【解決手段】走行用の車輪を備えた本体部、搭乗部及び操舵部から成る搭乗・操舵部を有する。傾斜部位を路面に対して傾斜させるためのアクチュエータと、傾斜部位に生じる横加速度を検出する横加速度検出部と、乗員が、車両を手押しで走行させるために、傾斜部位を傾斜させたときの横加速度に基づいて傾斜制御を行い、アクチュエータを駆動する傾斜制御処理手段とを有する。乗員が傾斜部位を傾斜させたときの横加速度に基づいて傾斜制御が行われ、アクチュエータが駆動されるので、傾斜部位は、乗員が傾斜させたときの角度に保持される。
(もっと読む)
サスペンション制御装置
【課題】良好な運転感覚を得ることができるサスペンション制御装置を提供する。
【解決手段】サスペンション制御装置が備える第1実施形態コントローラは、検出された車速及び操舵角から横加速度推定手段により求められた横加速度を微分して得られた横加加速度に基づいて目標ピッチ角を算出する目標ピッチ角算出部21を有し、目標ピッチ角に基づいてショックアブソーバ6を制御する。そして、サスペンション制御装置は、横加加速度から目標となるピッチ角を算出し、このとき横加加速度と横加速度の符号が一致している場合を前下がりの目標ピッチ角と設定する。このように設定することにより、ハンドルを左右どちらかにきり増しても、前下がりとなるようにできる。良好な運転感覚を得られる。
(もっと読む)
サスペンション装置
【課題】 エアばね装置による車高調整を電磁アクチュエータにてエネルギー効率良く補助する。
【解決手段】 車両停車時に、エアばね制御部がエアばね装置を使って車高調整をするときに、アクチュエータ制御部が蓄電装置に蓄えた電気エネルギーで電磁アクチュエータを作動させて車高調整を補助する。この場合、アクチュエータ制御部は、ポンプ回転数からエアばね装置に給排される空気流量Qを検出し、空気流量Qに応じたデューティ比でスイッチング素子をPWM制御して電磁アクチュエータの電動モータを駆動制御する。これにより、エアばね装置による車高調整と同程度の速度で電磁アクチュエータによる車高調整補助を行うことができる。この結果、蓄電装置の蓄電エネルギーを効率良く使いながら、迅速に車高調整を行うことができる。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】乗り心地の向上と接地性の向上との両立を実現することができるサスペンション制御装置及びサスペンション制御方法を提供する。
【解決手段】ばね下振動検出部13で検出したばね下速度x1´に対して、制御特性調整フィルタでフィルタ処理して推力発生装置6の制御指令値F1を算出する。制御特性調整フィルタの位相特性は、ばね下共振周波数において、ばね下振動周波数に対する制御指令値の位相を0度とし、ばね下共振周波数より低い(又は高い)周波数帯域において、前記位相を0度に対して進める(又は遅らせる)特性とする。また、ゲイン特性は、ばね下共振周波数より低い(又は高い)周波数帯域において、ばね下振動周波数に対する制御指令値の比率を、ばね下共振周波数における比率より小さい特性とする。
(もっと読む)
サスペンション制御装置、及びサスペンション制御方法
【課題】乗心地と接地性とのトレードオフの関係を改善する。
【解決手段】第一の算出部41は、検出したストローク速度に基づいて乗心地制御項となる第一の制御量を算出し、周波数特性調整部43は、検出した接地荷重の周波数特性を車両の走行状態に基づいて調整し、第二の算出部44は、周波数特性を調整した接地荷重に基づいて接地性制御項となる第二の制御量を算出し、目標制御量演算部45は、第一の制御量及び第二の制御量に基づいて目標制御量を設定する。周波数特性の調整については、車速V、加減速度ax、横加速度ay、操舵速度dδ等に応じて、フィルタ特性L30を決定し、このフィルタ特性L30を介して接地荷重の周波数特性を調整する。
(もっと読む)
車両用状態推定装置、車両用状態推定方法、車両用懸架制御装置および自動車
【課題】サスペンションの状態推定をより高精度に行う。
【解決手段】車両用懸架制御装置1Aは、車両挙動予測部201と、車両挙動推定部202と、サスペンション制御部203とを備え、車両挙動予測部201で、車両に将来加わる予定の外乱(路面形状)に対する車両挙動を予測し、車両挙動推定部202において、この将来の車両挙動の予測結果を基に、その将来における車両挙動の推定に用いるカルマンフィルタのゲインを補正する。そして、車両挙動推定部202は、ゲインを補正したカルマンフィルタを用いて現在の車両挙動を推定し、サスペンション制御部203は、この推定結果に基づいて、能動型懸架装置の動作を制御する。
(もっと読む)
車両用アクティブサスペンションの制御方法及び装置
【課題】車両重量の増加を招くことなくフレームのねじれを抑制し、該フレームのねじれに起因した弾性振動や操縦安定性への悪影響を改善する。
【解決手段】各車軸1上にフレーム2をサスペンションスプリングを介して懸架すると共に、各車軸1とフレーム2との間に両者を近接離間し得るよう上下方向に拡縮作動するアクチュエータ4を装備した車両用アクティブサスペンションの制御するにあたり、フレーム2に対する各車軸1の左右位置での相対変位とフレーム2側の上下加速度とに基づき、フレーム2のねじれまで考慮して表現された車両モデルの状態方程式により走行中のフレーム2のねじれを状態変数の一要素として時々刻々推定し、その推定されたフレーム2のねじれを他の状態変数と適宜に組み合わせて制御則を決めるためのパラメータとし且つ該各パラメータが小さくなるように各アクチュエータ4をリアルタイムで制御する。
(もっと読む)
サスペンション制御装置、及びサスペンション制御方法
【課題】乗心地と接地性とのトレードオフの関係を改善する。
【解決手段】第一の算出部41は、検出したストローク速度に基づいて乗心地制御項となる第一の制御量を算出し、周波数特性調整部43は、検出した接地荷重の周波数特性を第一の制御量に基づいて調整し、第二の算出部44は、周波数特性を調整した接地荷重に基づいて接地性制御項となる第二の制御量を算出し、目標制御量演算部45は、第一の制御量及び第二の制御量に基づいて目標制御量を設定する。また、周波数特性調整部43は、先ず第一の制御量に基づいて電磁式ショックアブソーバ10を駆動制御すると仮定して、車輪の接地荷重が変化するときの応答特性L10を推定し、推定した応答特性L10と所定の基準応答特性L20との比較結果に基づいてフィルタ特性L30を決定し、このフィルタ特性L30を介して接地荷重の周波数特性を調整する。
(もっと読む)
車両用サスペンション装置、電動モータの制御方法、及びアクチュエータ制御装置
【課題】電動モータによる発生推力をより推力指令値に近い状態に制御可能とする。
【解決手段】電動モータが発生する推力で車輪2の上下位置を規制する。その際に、推力指令値T1と実推力T0との偏差に応じたフィードバック補償量HF1とフリクション補償量HF2との2つの補償量で、上記電動モータへの推力指令値T1を補償する。このとき、上記推力指令値T1に対する上記2つの補償量を、サスペンションの上下ストローク速度VSに応じて変更する。
(もっと読む)
1 - 20 / 55
[ Back to top ]