
Fターム[3D301AA05]の内容
Fターム[3D301AA05]の下位に属するFターム
ノーズダイブ (195)
スクオート、スクアット (125)
Fターム[3D301AA05]に分類される特許
1 - 20 / 368
サスペンション制御装置
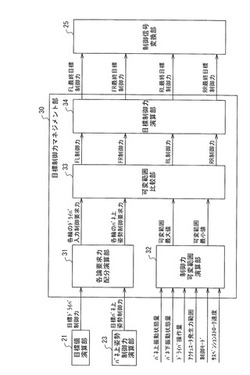
【課題】車両振動の各振動成分の各バネ上挙動を抑制する。
【解決手段】サスペンション制御装置は、減衰させる制御力の出力可能な範囲を算出する制御力可変範囲演算部32と、制御力可変範囲演算部32が算出した出力可能な範囲と車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの少なくとも2つの振動成分から算出された各制御力とをそれぞれ比較し、車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの前記少なくとも2つの振動成分について前記出力可能な範囲内の制御力を抽出する可変範囲比較部33と、可変範囲比較部33が抽出した各制御力に基づいて、各輪の目標制御力を算出する目標制御力演算部34と、目標制御力演算部34が算出した目標制御力に基づいて、ACTR部を制御する制御信号変換部25とを備える。
(もっと読む)
インホイールモータ車両用サスペンションシステム

【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
作業車両
【課題】走行機体の傾斜制御の実行中に、圃場面等の傾斜や走行中の振動等によって、走行機体の傾斜姿勢が急激に変化したり傾斜角度検出用のセンサが過剰検出したりする場合に、傾斜制御を継続させて走行機体の乗り心地が悪化するという問題を解消する。
【解決手段】左右の走行部2にて支持された走行機体1と、走行機体1の左右傾斜姿勢を変更する一対のローリングアクチュエータ38と、走行機体1の前後傾斜姿勢を変更する一対のピッチングアクチュエータ177と、走行機体1の左右傾斜角度を検出する左右傾斜センサ374と、走行機体1の前後傾斜角度を検出する前後傾斜センサ381とを備える。左右傾斜制御の実行中において、現時点の左右傾斜センサ374値λ(2)とその直前の左右傾斜センサ374値λ(1)との差分の絶対値|λ(1)−λ(2)|が予め設定された左右傾斜閾値Λを上回ると、左右傾斜制御を禁止するように構成する。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
サスペンション制御装置
【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
車高調整方法及び車高調整装置
【課題】人の乗車や荷物の積載時であっても、車高を調整することで車両の操縦安定性能や乗り心地等の動的なバランスが最適となるように車両の姿勢を制御可能とする車高調整方法及び車高調整装置を提供する。
【解決手段】少なくとも1輪に車高の調整を可能とする車高調整手段が設けられた車両のいずれかの1輪を加振手段により0〜6Hzの周波数の範囲で変化させながら上下方向に加振して当該車両全輪の輪荷重値の変化を測定し、加振の周波数と、測定された各輪の輪荷重値に基づいて車両のピッチロール伝達特性を設定し、当該ピッチロール伝達特性におけるゲインのピークとなる周波数より1Hz分周波数が高いときのピッチロール伝達特性における位相がゼロに近づくように車高調整手段を制御する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
サスペンション装置
【課題】 高価なコントローラ、アクチュエータを用いることなく、車両走行時の低周波から高周波にわたる広い周波数域に対応した減衰力の制御を行う。
【解決手段】 左,右の前輪サスペンション4の緩衝器6と左,右の後輪サスペンション7の緩衝器9とを、周波数感応部24が付設された減衰力調整式油圧緩衝器(即ち、減衰力調整+周波数感応緩衝器)により構成する。緩衝器6,9に設ける減衰力可変機構17のアクチュエータ20をコントローラ37により駆動制御する。コントローラ37は、車体1側の上下振動が低周波のときに、その上下振動に応じて減衰力可変機構17(シャッタ18)による減衰力をソフトとハードとの間で可変に調整し、前記振動が前記低周波よりも高周波のときには、前記減衰力の調整制御を行わない構成としている。
(もっと読む)
トラクタ
【課題】プラウによる作業を行う際に油圧シリンダを用いたサスペンションを有効に機能させながら、車体前部が持ち上がるピッチングを抑制する。
【解決手段】牽引負荷センサSで検出される牽引負荷値に基づいてプラウを昇降するドラフト制御において、プラウを上昇させる上昇制御信号を検知した場合にモード切換手段70がサスペンション制御手段64の制御によりサスペンション機能を抑制又は制限することで走行機体の前部が持ち上がる不都合を抑制し、上昇制御信号が非検知にある場合にはモード切換手段70がサスペンション制御手段64の制御によりサスペンション機構を有効に機能させる。
(もっと読む)
鉄道車両制御システム
【課題】簡素かつ省スペースでありながら高機能な車体制御を可能とする。
【解決手段】車体2と台車枠9とを備えた鉄道車両1に適用可能な鉄道車両制御システム100であって、車体2に設けられた上壁部21と、台車枠9に設けられた下壁部22と、上壁部21を下壁部22に対して弾性的に相対変位させる空気室24と、上壁部21に取り付けられて下壁部22のターゲット33を撮像して画像信号を出力するCCDカメラ31とを有する空気バネ装置10と、CCDカメラ31で撮像された画像を処理して上壁部21と下壁部22との間の相対水平変位量及び相対水平変位方向を算出する変位演算部51〜54と、変位演算部51〜54で算出された相対水平変位量及び相対水平変位方向と相対鉛直変位量との少なくとも一方に応じて車両制御を行う車両制御部55とを備えている。
(もっと読む)
軌道系交通車両及びその車体姿勢制御装置
【課題】軌道系交通車両の加減速時の乗り心地をよくする。
【解決手段】車両Vの前部と後部とに配置され、上下方向に変位して車体1を走行方向で傾ける傾斜アクチュエータ35と、この傾斜アクチュエータ35の駆動量を制御する傾斜アクチュエータコントローラ31とを備えている。傾斜アクチュエータコントローラ31は、車両Vの加減速によって、車体内の乗客Mに作用する車体の床面2に平行な前後方向の加速度αdを、同方向成分の重力加速度gdで打ち消し得る車体1の走行方向の傾斜角度θを求める。そして、傾斜アクチュエータコントローラ31は、この傾斜角度θを実現し得る傾斜アクチュエータ35の駆動量を求めて、この駆動量を目標駆動量とする駆動指令を傾斜アクチュエータ35に出力する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
サスペンション装置
【課題】操舵初期における車体のロールを充分に抑制でき、さらには、車体の左右の揺り返しを防止し、車両における乗り心地を向上させることができるサスペンション装置を提供することである。
【解決手段】緩衝器2nと、当該緩衝器2nにおける減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構を制御する制御装置4とを備えたサスペンション装置1において、車体Bの横加速度Gを検知する横加速度検知部5と、車体Bのロール角速度ωを検知するロール角速度検知部6と、操舵輪Sの舵角速度θを検知する舵角速度検知部7とを備え、制御装置4は、舵角速度θが所定の不感帯域を超えると、舵角速度θから求めた減衰力Fθと、横加速度Gから求めた減衰力FGと、ロール角速度ωから求めた減衰力Fωのうち、最大の減衰力を操舵初期加算減衰力とし、当該操舵初期加算減衰力を用いて緩衝器が発生すべき最終減衰力Dnを求めて緩衝器2nを制御する操舵初期制御を行う。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】バネ上が高い周波数で小さく振動するときにも振動を吸収するようにスカイフック制御することが可能な減衰力可変ダンパの制御装置を提供することを課題とする。
【解決手段】ダンパ1aのバネ上速度が高いほどダンパ1aの減衰力が高くなるように減衰力制御量を設定し、バネ上速度の方向とダンパ1aのストローク速度の方向が同方向の場合に、減衰力制御量に基づいて減衰力を制御するスカイフック制御を行う減衰力可変ダンパ1の制御装置20とする。そして、ストロークセンサ14が検出するストローク変位に基づいて算出されるダンパ1aの振幅が小さくなるにつれて、ダンパ1aの減衰力が低くなるように減衰力制御量を補正することを特徴とする。
(もっと読む)
サスペンション装置
【課題】 実用性の高いサスペンション装置を提供することを課題とする。
【解決手段】 本発明のサスペンション装置10は、基端部において車体に回動可能に保持され、車輪を回転可能に保持する駆動装置18が連結される回動アーム110と、先端部において回動アームの基端部と係合し、回動アームの回動に対して弾性反力を発生させる捩りコイルばね130と、車体に固定され、捩りコイルばねの基端部を支持するとともに、回動アームの回動軸線を中心としたその基端部の回転位置を変更可能なスプリング支持装置とを備える。本サスペンション装置によれば、捩りコイルばねの発生する弾性反力を変化させることなく、回動アームを積極的に回動させることが可能となる。そのため本サスペンション装置の実用性は向上されている。
(もっと読む)
1 - 20 / 368
[ Back to top ]