
Fターム[3D301EA17]の内容
Fターム[3D301EA17]の下位に属するFターム
ばね上ばね下相対加速度、ストローク加速度 (41)
ばね上の加速度 (450)
ばね下の加速度 (183)
Fターム[3D301EA17]に分類される特許
1 - 20 / 61
減衰力調整式シリンダ装置
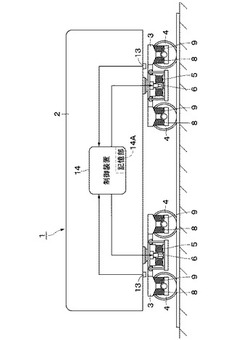
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
車両用防振装置
【課題】ロードノイズの低減効果が高い車両用防振装置を提供することにある。
【解決手段】車両用防振装置10は、車両の懸架装置3に対して非接触であり、懸架装置3を介してボディ2に入力される振動と逆位相の振動が与えられる可動部52を有し、当該可動部52の軸芯が懸架装置3の軸芯と同軸芯上に設けられる加振部20と、懸架装置3をボディ2に支持する支持部材37に固定され、加振部20を収容するハウジングケース40と、支持部材37以上の剛性を備える位置に設けられ、且つ、懸架装置3からの振動が、支持部材37よりも低い剛性部分を介さずに伝達できる場所に位置する振動検出部61と、を備える。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
車両制御システムおよび制御装置
【課題】乗り心地と操縦安定性とを両立して向上させることができる車両制御システムおよび制御装置を提供する。
【解決手段】車両の振動を吸収するばね剛性を変更するばね剛性変更装置と、車両の振動を減衰する減衰量を可変可能な減衰量変更装置と、車両に発生する振動のうち路面入力による振動を推定する路面入力振動推定部と、振動のうちドライバ操作による振動を推定するドライバ操作振動推定部と、ばね剛性変更装置を制御して路面入力による振動を吸収させ、減衰量変更装置を制御してドライバ操作による振動を減衰させる制御部と、を備えることで上記課題を解決する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供する。
【解決手段】目標減衰力の方向が緩衝器の伸縮方向と同じ方向である場合に対応して目標減衰力の変化に対して一定値をとる出力下限ラインA1と、目標減衰力の方向が緩衝器の伸縮方向が異なるものの出力上限を上回る場合に対応して目標減衰力の変化に対して一定値をとる出力上限ラインB1と、目標減衰力の方向が緩衝器の伸縮方向が異なり緩衝器が出力可能な場合に対応して目標減衰力に対して比例的に変化する出力可能ラインC1と、出力可能ラインと出力下限ラインとを、出力可能ラインと出力上限ラインとを接続する緩和ラインD1,E1とを備えたマップを用いて、緩衝器の減衰力を調節する減衰力調整機構へ与える目標電流指令値を求める。
(もっと読む)
サスペンション装置
【課題】操舵初期における車体のロールを充分に抑制でき、さらには、車体の左右の揺り返しを防止し、車両における乗り心地を向上させることができるサスペンション装置を提供することである。
【解決手段】緩衝器2nと、当該緩衝器2nにおける減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構を制御する制御装置4とを備えたサスペンション装置1において、車体Bの横加速度Gを検知する横加速度検知部5と、車体Bのロール角速度ωを検知するロール角速度検知部6と、操舵輪Sの舵角速度θを検知する舵角速度検知部7とを備え、制御装置4は、舵角速度θが所定の不感帯域を超えると、舵角速度θから求めた減衰力Fθと、横加速度Gから求めた減衰力FGと、ロール角速度ωから求めた減衰力Fωのうち、最大の減衰力を操舵初期加算減衰力とし、当該操舵初期加算減衰力を用いて緩衝器が発生すべき最終減衰力Dnを求めて緩衝器2nを制御する操舵初期制御を行う。
(もっと読む)
スタビライザ装置
【課題】応答性を向上できるようにしたスタビライザ装置を提供する。
【解決手段】スタビライザ装置1は、電動モータ25によりねじ部材22を回転駆動してプランジャ21を軸方向に変位させることにより、スタビライザバー2,3間のねじり剛性を調節する構成とする。電動モータ25を制御するコントローラ30は、プランジャ21の位置を、少なくともハード、ミディアム、ソフトの3段階に制御可能とし、車体が直進状態で路面が悪路でない場合はミディアム、車体がロール状態の場合はハード、路面が悪路の場合はソフトとするように制御する。これにより、例えば車体が直進状態からロール状態に移る際に、プランジャ21の位置をミディアムからハードに迅速に調節することができる。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
車体姿勢制御装置
【課題】車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】車両の旋回走行時におけるピッチレイトとロールレイトを比例関係にする制御を行うため、コントローラ13を、ゲイン16、判別部17、乗算部18、FF制御部19、差演算部20、FB制御部21、平均値演算部22、目標減衰力算出部23およびダンパ指令値算出部24により構成する。ロールレイトに比例した目標ピッチレイトを求め、左,右の前輪側と左,右の後輪側とに設けた減衰力可変ダンパ6,9の減衰力特性を、この目標ピッチレイトとなるように可変に制御して、車体に対してピッチモーメントを発生させる制御を行う構成としている。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
鉄道車両用制振装置
【課題】正確に曲線区間の認識を行うことができ低コストな鉄道車両用制振装置を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、鉄道車両の車体Bの振動を抑制する鉄道車両用制振装置1において、鉄道車両の車体床面に対する鉛直方向の加速度αvを検知する加速度検知手段40,41と、加速度検知手段で検知した加速度αvと重力加速度Gとに基づいて鉄道車両が曲線区間を走行中であることを認識する曲線区間認識手段45とを備えたことを特徴とする。
(もっと読む)
車両用緩衝器
【課題】インパクトショックのみを効果的に低減でき車両における乗り心地を向上することができる車両用緩衝器を提供することである。
【解決手段】シリンダ1と、シリンダ1内に移動自在に挿入されるロッド2と、シリンダ1内に摺動自在に挿入されてロッド2に連結されるピストン3とを備えた車両用緩衝器Dにおいて、圧縮行程時に減衰力を発生させる減衰弁4を迂回する迂回流路5と、迂回流路5を開閉する開閉弁6とを備え、当該開閉弁6は車両の前から後へ向かう方向の加速度の作用によって迂回流路5を開放することを特徴とする。
(もっと読む)
減衰力可変ダンパの制御装置および制御方法
【課題】様々な入力に対応することができ、且つ、車体の姿勢変化を効果的に抑制できる可変減衰力ダンパの制御装置および制御方法を提供する。
【解決手段】減衰力制御装置は、目標減衰力設定部61と、減衰力補正値設定部62と、目標減衰力補正部63とを備える。目標減衰力設定部61は、各車輪に近接する上下Gセンサの検出値である上下加速度Gzfl〜Gzrrに基づき、各ダンパの目標減衰力Dtfl〜Dtrrをそれぞれ設定する。また、減衰力補正値設定部62は、各目標減衰力Dtfl〜Dtrrを相互補間するために、他のダンパに対応する上下加速度Gzfl〜Gzrrに基づき、減衰力補正値Dcfl〜Dcrrをそれぞれ設定する。目標減衰力補正部63は、減衰力補正値Dcfl〜Dcrrに基づき、目標減衰力Dtfl〜Dtrrをそれぞれ補正する。
(もっと読む)
車両挙動制御装置
【課題】路面状況に応じて車両のヨー運動とサスペンションの減衰力の制御を行うことで、車両挙動特性と乗心地性を向上する車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両の車体と前輪および後輪との間に介装され、減衰力可変機構を備えたサスペンション装置と、前輪または該後輪の少なくとも一方における該左右輪の駆動力を調整する第1のヨー運動調整手段と、輪間での差動制限度合を調整する第2のヨー運動調整手段と、路面の状況に応じて第1及び第2のヨー運動調整手段を制御して車両のヨー運動を制御するとともに、減衰力可変機構を制御して減衰力可変機構の減衰力を調整する制御手段とを有する。
(もっと読む)
車体傾斜制御システムおよびそれを備えた鞍乗型車両
【課題】前部または後部の少なくともいずれかに一対の走行部材を有し、車体が傾斜することを許容しつつ車体が過度に傾斜することを抑制することができる車体傾斜制御システムおよびそれを備えた鞍乗型車両を提供する。
【解決手段】車体傾斜制御システムは、一対の車輪を車体に対して上下動可能に支持する支持機構と、一対の車輪の上下動に対する抵抗力を支持機構に与える抵抗力付与機構50と、車体の傾斜量を検出するジャイロセンサ83、及び、加速度センサ85と、これらセンサ83、85の検出結果に基づいて、車体の傾斜量が第1角度を超えるときは抵抗力付与機構50の抵抗力を第1抵抗力に設定し、車体の傾斜量が第1角度以下のときは抵抗力付与機構50の抵抗力を第1抵抗力より小さい第2抵抗力に設定する制御部90と、を備えている。これによれば、第1角度を超えて車体が傾斜することを、好適に抑制することができる。
(もっと読む)
1 - 20 / 61
[ Back to top ]