
Fターム[3D301EA20]の内容
Fターム[3D301EA20]に分類される特許
1 - 20 / 183
サスペンション制御装置
【課題】車両振動の各振動成分の各バネ上挙動を抑制する。
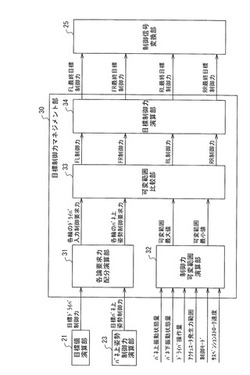
【解決手段】サスペンション制御装置は、減衰させる制御力の出力可能な範囲を算出する制御力可変範囲演算部32と、制御力可変範囲演算部32が算出した出力可能な範囲と車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの少なくとも2つの振動成分から算出された各制御力とをそれぞれ比較し、車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの前記少なくとも2つの振動成分について前記出力可能な範囲内の制御力を抽出する可変範囲比較部33と、可変範囲比較部33が抽出した各制御力に基づいて、各輪の目標制御力を算出する目標制御力演算部34と、目標制御力演算部34が算出した目標制御力に基づいて、ACTR部を制御する制御信号変換部25とを備える。
(もっと読む)
車両状態量推定装置及びサスペンション荷重推定装置

【課題】車両状態量及びサスペンション荷重の推定精度が確保される車両状態量推定装置及びサスペンション荷重推定装置を提供する。
【解決手段】サスペンション荷重に伴うボディパネル1の歪量を、直接、ボディパネル1に取り付けられた半導体歪センサ3によって検出するので、車両走行時の荷重移動を高い精度で推定することができる。
(もっと読む)
サスペンション制御装置
【課題】 オーバーステアを軽減して、車両の安定性を高めるようにする。
【解決手段】 車体1には操舵角δを検出する操舵角センサ12と実ヨーレートrを検出するヨーレートセンサ13を設ける。コントローラ15は、操舵角δと実ヨーレートrに基づいて、車両がオーバーステアか否かを判断する。そして、コントローラ15は、車両がオーバーステア状態と判断した場合には、操舵角δに基づく目標ヨーレートr0と実ヨーレートrとの差分に応じて、後輪側の減衰力指令信号IRRを制御する。これにより、車両がオーバーステア状態となったときに、車体1の両後輪3のうち、縮み行程の減衰力をハードに、伸び行程の減衰力をソフトに調整する。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体1と車輪2との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が高周波のときには、補正相対速度V2ofsとして所定の値(例えば、直前の制御周期の補正相対速度V2ofs_Z)を出力する。相対速度V2が低周波のときには、補正相対速度V2ofsは、相対速度V2の符号(正負)の切換りに応じてその符号(正負)が切換わるようにする。
(もっと読む)
振動系における機械的動力損失を測定する方法
【課題】自動車のエンジンマウントやサスペンション等の振動絶縁装置又は緩衝装置の設計支援するため、振動系における機械的動力損失を測定する方法を提供する。
【解決手段】この系は、線形時不変であり、かつ、定常状態であると仮定する。この方法は、振動系と振動系の外側の部品との間の接続点を識別するステップを含む。窓付き時間領域において各接続点における加速度を測定し、窓付き時間領域に対して各接続点における力も決定する。高速フーリエ変換により時間領域値を周波数領域値に変換し、周波数領域加速度値を速度値に変換する。振動系の動力損失は、振動系へのパワーフローの1/2の合計に等しい。この場合、各パワーフローは、時間窓ごとの周波数領域において接続点における複素共役速度×力の積の実数部の1/2である。
(もっと読む)
サスペンション制御装置
【課題】特に、悪路を走行中、突起を乗り越えた際の乗り心地を改善するサスペンション制御装置を提供する。
【解決手段】本サスペンション制御装置のコントローラの制御方法では、悪路走行制御中に、突起乗り越し判定部により突起乗り越し判定が成立した場合でも、悪路走行制御を継続させる。これにより、車両が悪路を走行中に突起を乗り越した際、その減衰力特性が従来よりもソフト制御になるので乗り心地を改善することができる。
(もっと読む)
サスペンション装置
【課題】 液圧ダンパ装置40のストッパ当たりの発生頻度が低減されたサスペンション装置を提供すること。
【解決手段】 サスペンション本体10に追従上限周波数を越える周波数の振動が入力されたときに、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡がるように電動アクチュエータ30が伸縮作動する。このため追従上限周波数よりも大きな周波数の振動によって液圧ダンパ装置40が電動アクチュエータ30に対して移動した場合でも、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡げられているので液圧ダンパ装置40がバウンドストッパ47に当たり難くなる。よって、ストッパ当たりの発生頻度が減少し、ストッパ当たりの発生による乗り心地の悪化が抑えられるとともに、バウンドストッパ47の耐久性も向上する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車両のサスペンション装置
【課題】 電磁アクチュエータの電動モータ31の過熱を防止する。
【解決手段】 モータフリー制御部53は、モータ温度Tmが過熱防止開始温度Tmaを超えていると判断した場合には、相間開放用リレーユニット54の各リレーR1,R2,R3をオフ状態にする。これにより、電動モータ31の過熱が防止される。この場合、エアバネ制御部150は、給排装置80からエアバネ装置20に圧縮空気を供給して、エアチャンバ26の内圧を上昇させて、エアバネ装置20のバネ定数を増加させる。これにより、電動モータ31が減衰力を発生できなくても、ストッパ当たりが低減される。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
サスペンション装置
【課題】 高周波振動入力時にダンパ装置が所望の減衰力を発生するように構成されたサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、モータ31の回転角速度Vmを取得する状態量演算部51と、状態量演算部51により取得された回転角速度Vmに基づいて、回転角速度Vmの高周波成分に対する減衰力(モータ減衰力fmの高周波成分)fm_filtを演算する減衰力演算部(524,525)と、モータ31が減衰力演算部により演算された減衰力を発生するように、モータ31が出力すべき目標制御力fを演算する目標制御力演算部526と、を備える。そして、目標制御力演算部526により演算された目標制御力fに基づいてモータ31を制御する。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備える。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
サスペンション制御装置
【課題】 輪荷重増減の応答性と絶対量を制御することができ、車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側とし後期をソフト側に切替える縮み行程ハード・ソフト切替制御と、伸び行程中の初期をソフト側とし後期をハード側に切替える伸び行程ソフト・ハード切替制御とのいずれかを実行する。輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とし後期をハード側に切替える縮み行程ソフト・ハード切替制御と、伸び行程中の初期をハード側とし後期をソフト側に切替える伸び行程ハード・ソフト切替制御とのいずれかを実行する。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下上下加速度信号のローパスフィルタ処理による位相遅れを低減する。
【解決手段】 フィルタ特性変更部160は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ下ローパスフィルタ処理部121のカットオフ周波数fcを通常よりも高いfchighに設定する。これにより、バネ下上下加速度x1”の位相遅れが抑制される。従って、慣性補償制御を適切に行うことができる。
(もっと読む)
車両制御装置
【課題】車両の姿勢制御の性能の確保と製造コストの低減とを両立することができる車両制御装置を提供すること。
【解決手段】車両制御装置2に、左右それぞれのスタビライザバー12と一体になって回転可能なスタビライザバーギア24と、双方のスタビライザバーギア24と噛み合うピニオンギア26と、をそれぞれ有する前輪6用及び後輪8用のスタビライザ10と、双方のスタビライザ10を連結する連結シャフト34と、を備え、左右のスタビライザバーギア24の回転トルクが同相の場合には、ピニオンギア26が回転することによりスタビライザバーギア24間で回転を伝達し、回転トルクが逆相の場合には、ピニオンギア26が停止することによりスタビライザバーギア24の回転を停止させ、連結シャフト34は、スタビライザバーギア24の回転軸を中心としてピニオンギア26を回転させることによりスタビライザバーギア24の回転を調節する。
(もっと読む)
車両の減衰力制御装置及び減衰力制御方法
【課題】車体4と乗員1との一体感を向上させることで、乗員1の乗り心地を向上可能な車両の減衰力制御の技術を目的とする。
【解決手段】車体4と車輪6との間に設置された減衰力可変型のショックアブソーバ5の減衰力を減衰力目標値に制御する際に、車体4に対する乗員1の相対変位が大きい場合には、上記相対変位が小さい場合に比べて、上記減衰力目標値を大きく設定する。
(もっと読む)
1 - 20 / 183
[ Back to top ]