
Fターム[3D301DB32]の内容
Fターム[3D301DB32]の下位に属するFターム
ばね下に配置 (34)
Fターム[3D301DB32]に分類される特許
1 - 20 / 145
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両のロール角推定方法及び装置

【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
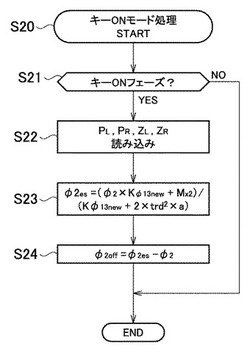
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
車両における懸架システムのための変位計測システムおよび方法
【課題】計測すべきストラットの変位を効率的に可能にする一方で作業車両の運転中の計測システムに対する損傷を最小限に抑える、懸架ストラット計測システムおよび方法を提供すること。
【解決手段】車両は、車台、車軸、懸架ストラット、およびセンサ組立体を備える。前記懸架ストラットは、下端部および上端部を有するバレル、ならびに下端部および上端部を有するロッドを備える。前記ロッド下端部は、前記バレル上端部内に摺動可能に収容される。前記バレル下端部は前記車軸に連結され、前記ロッド上端部は前記車台に連結される。センサ組立体は、前記車台と前記車軸との間の相対運動を検知するために、前記車台と前記車軸との間に連結される。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、乗員が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、加速操作部材の操作量に基づいて走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。走行制御処理手段は、共振の状態を判定する共振発生状態判定処理手段及び共振の状態に応じて、走行用の駆動部における駆動力の発生を抑制する駆動力抑制処理手段を備える。
(もっと読む)
外力検出が可能な防振装置
【課題】入力荷重の高精度な検出を、充分な耐久性および実用性をもって実現することが可能とされた、新規な構造の外力検出が可能な防振装置を提供すること。
【解決手段】誘電性の弾性材からなる誘電体層20の両面に対して導電性の弾性材からなる一対の電極膜22,22を設けた静電容量型センサ18が、第1の取付部材12と第2の取付部材14の間への外力作用に際しての本体ゴム弾性体16への引張力の作用方向に伸びる状態で配設されて、本体ゴム弾性体16に固着されている。
(もっと読む)
車両
【課題】傾斜制御を精度良く行うことができるようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行制御用の制御値を発生させる走行制御処理手段と、走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両に許容範囲を超えて発生する傾斜状態を判定する傾斜状態判定処理手段、及び傾斜状態に応じて駆動力の発生を抑制する駆動力抑制処理手段を備える。車両に許容範囲を超えて発生する傾斜状態が判定され、判定された傾斜状態に応じて、走行用の駆動部における駆動力の発生が抑制されるので、車両が許容範囲を超えて傾斜させられることがなくなる。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、運転者が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行用の駆動部を駆動するための走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両の前後方向における重心の移動量を算出し、最大角加速度を算出し、最大角加速度に基づいて前記傾斜制御用の制御値の変動を制限する制御値制限処理手段を備える。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、車体に作用する横加速度及び前後加速度を検出するセンサと、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、車体の傾斜を制御する制御装置とを有し、制御装置は、センサが検出する横加速度に基づく傾斜制御を行うとともに、センサが検出する横加速度及び前後加速度に基づいて重心位置が制御可能な範囲を外れたか否かを判断し、重心位置が制御可能な範囲を外れた場合には車体を傾斜させる動作を停止させる。
(もっと読む)
車両
【課題】ブレーキをかけても、車体の安定を維持することができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵輪と、駆動輪と、車体に作用する横加速度を検出する横加速度センサと、車速を検出する車速検出手段と、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、横加速度に基づく傾斜制御を行うとともに、最大減速度で減速した場合であっても、停止するまでの時間内に車体の傾斜角を安定傾斜角にまで復帰させることが可能であるように、車速を制御する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、横加速度を検出するセンサと、ヨー角速度検出手段と、車速検出手段と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、横加速度に基づくフィードバック制御を行うとともに、ヨー角速度の微分値及び車速からリンク角速度予測値を算出し、算出したリンク角速度予測値を使用したフィードフォワード制御を行って車体の傾斜を制御する。
(もっと読む)
トラック用リヤサスペンション
【課題】リーフスプリングの折損を簡単な構成で検出することを可能にしつつ、リーフスプリング折損の早期発見が図れるトラック用リヤサスペンションを提供する。
【解決手段】車体フレーム11にリーフスプリング45を介して車軸13が弾性自在に支持され、リーフスプリング45は、車体フレーム11に両端を支持されたメインスプリング23と、このメインスプリング23が荷重を受けて所定量撓んだときに荷重を受けるヘルパースプリング26とから構成され、このヘルパースプリング26が車体に設けられたヘルパーブラケット27,27に当接又は離間可能に支持されるトラック用リヤサスペンション20において、ヘルパーブラケット27は、ヘルパースプリング26に押圧されて荷重を検出する圧電素子68が設けられている。
(もっと読む)
キャンバ角調整装置
【課題】車両への搭載時に、異物侵入を低減可能なキャンバ角調整装置を提供する。
【解決手段】車輪のキャンバ角を調整するキャンバ角調整装置1において、車体に設置され駆動力を発生するモータ2a及びモータ2aの発生した駆動力を出力する出力軸2bを有する駆動部材2と、出力軸2bから出力される駆動力が伝達されるクランク軸4a1,4b2及びクランク軸4a1,4b2に対して偏心するクランクピン4a2,4b1を有するクランク部4と、クランクピン4a2,4b1とハブとを連結する連結部材51と、一体に成形され、クランク軸4a1,4b2を支持する支持ブラケット17は、車体に取り付けられる車体支持部と、クランク軸4a1の一方を支持する第1の支持部17cと、クランク軸4b2の他方を支持する第2の支持部17dと、第1の支持部17cと第2の支持部17dの間でクランク部4の少なくとも一部を覆う側面部17bとを有す。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
キャンバ角制御装置
【課題】 キャンバ角の調整を車両の状態にあわせて的確に実行させるキャンバ角制御装置を提供する。
【解決手段】 車体120に設置され駆動力を発生するモータ102a及びモータ102aの発生した駆動力を出力する出力軸102bを有する駆動部材102と、出力軸102bに連結され駆動部材102の回転を減速する減速部103と、減速部103と連結されるクランク軸104a及びクランク軸104aに対して偏心したクランクピン104bを有するクランク部104と、一端の第1連結部151aでクランクピン104bに連結される連結部材151と、車体120に連結されると共にキャンバ軸CAを形成するキャンバ部材156bと、車輪2を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材156bに回動可能に支持され、他方側で連結部材151の他端に第2連結部151bで連結される回動部材133と、車体120の状態に応じて、第1連結部151aの回転方向を上回し又は下回しに選択して制御する制御部70と、を備えることを特徴とする。
(もっと読む)
キャンバ角制御装置
【課題】キャンバ角を調整する際に部品の摩耗を考慮して制御するキャンバ角制御装置を提供する。
【解決手段】車体に設置され駆動力を発生するモータ102a及駆動力を出力する出力軸102bを有する駆動部材102と、回転を減速する減速部103と、出力軸102bと同一軸上の中心線を中心に回転するクランク軸104aと平行に連結されクランク軸104aを中心に回転するクランクピン104bを有するクランク部104と、一端の第1連結部151aでクランクピン104bに連結される連結部材151と、キャンバ軸を形成するキャンバ部材と、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材151の他端に第2連結部151bで連結される回動部材と、連結部材151の上回し回数と下回し回数に応じて前記第1連結部を上回し又は下回しに選択して回転させる制御部とを備える。
(もっと読む)
車体構造
【課題】車両の乗り心地の向上を図ることができる車体構造を提供する。
【解決手段】車体構造10は、左右の前車輪13,14および左右の後車輪15,16を支持する懸架ユニット18と、懸架ユニット18を支持する主車体部11と、主車体部11に連結されるとともに主車体部11から下方に向けて延出されたアクチュエータユニット21と、アクチュエータユニット21により主車体部11から切り離された状態で吊り下げられた吊下フロア23とを備えている。これにより、吊下フロア23に振動が発生することをアクチュエータユニット21で抑制することができる。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する2つのセンサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、2つのセンサが検出する横加速度に基づいて、旋回方向外向きの加速度におけるセンサの検出軸方向の加速度成分と、重力におけるセンサの検出軸方向の加速度成分との合成値を選択的に算出し、車体の傾斜を制御する。
(もっと読む)
車両の減衰力制御装置及び減衰力制御方法
【課題】車体4と乗員1との一体感を向上させることで、乗員1の乗り心地を向上可能な車両の減衰力制御の技術を目的とする。
【解決手段】車体4と車輪6との間に設置された減衰力可変型のショックアブソーバ5の減衰力を減衰力目標値に制御する際に、車体4に対する乗員1の相対変位が大きい場合には、上記相対変位が小さい場合に比べて、上記減衰力目標値を大きく設定する。
(もっと読む)
車両
【課題】車両を手押しで容易に走行させることができるようにする。
【解決手段】走行用の車輪を備えた本体部、搭乗部及び操舵部から成る搭乗・操舵部を有する。傾斜部位を路面に対して傾斜させるためのアクチュエータと、傾斜部位に生じる横加速度を検出する横加速度検出部と、乗員が、車両を手押しで走行させるために、傾斜部位を傾斜させたときの横加速度に基づいて傾斜制御を行い、アクチュエータを駆動する傾斜制御処理手段とを有する。乗員が傾斜部位を傾斜させたときの横加速度に基づいて傾斜制御が行われ、アクチュエータが駆動されるので、傾斜部位は、乗員が傾斜させたときの角度に保持される。
(もっと読む)
1 - 20 / 145
[ Back to top ]