
Fターム[3D301EA36]の内容
Fターム[3D301EA36]に分類される特許
1 - 20 / 31
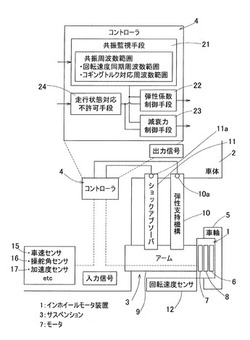
インホイールモータ車両用サスペンションシステム
【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
車両制御装置

【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度増加期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪2RL,2RRの旋回内輪のキャンバ角を旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪2RL,2RRの旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両1に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
段差位置登録装置、方法およびプログラム
【課題】段差位置の登録されやすさを人為的な要因に応じて調整する技術を提供する。
【解決手段】段差位置登録装置であって、車両の走行時に段差が検出された回数を示す検出回数を車両走行路の位置ごとに取得する回数取得手段と、前記位置を段差位置として登録するための基準となる前記検出回数を示す検出回数閾値を、前記位置が工事区間に属するか否かに応じて設定する閾値設定手段と、前記検出回数が前記検出回数閾値に達した未登録の前記位置を前記段差位置として登録する登録手段と、を備える。
(もっと読む)
減衰力制御装置
【課題】 電気モータの過大な発熱が抑えられるように、電気式ショックアブソーバの減衰力を制御すること。
【解決手段】 H式と、R式と、P式に、電気モータ40の発熱量の総和を表すQ式を加え、これらの4個の式に基づいて、電気モータ40の発熱量の総和が最小となるように各輪要求減衰力を演算する。このように演算された各輪要求減衰力に基づいて各電気式ショックアブソーバ30により発生される減衰力を制御する。これにより、電気モータ40の発熱量の総和が最小となり、電気モータ40の過大な発熱が抑えられる。
(もっと読む)
車両振動抑制装置
【課題】 アクティブスタビライザのアクチュエータの作動によるロール剛性制御と減衰力特性変更装置の作動によるダンパの減衰力特性制御の重複を防止すること。
【解決手段】 車両のバネ上部材HAに上下方向に作用する力とロール方向に作用する力がスタビライザ力およびサスペンション力により表された車両の2輪モデルを基に設計された一般化プラントに非線形H∞制御理論を適用することにより、スタビライザ力と減衰力により車両の上下振動およびロール振動が抑制されるように、目標アクティブスタビライザ力および要求減衰力が計算される。計算された目標アクティブスタビライザ力および要求減衰力に基づいて、スタビライザアクチュエータ23F,23Rの作動および各サスペンションアクチュエータ132FR,132FL,132RR,132RLの作動が制御される。
(もっと読む)
車両の減衰力制御装置
【課題】バネ上部材の挙動変化を早期に検知し、各ショックアブソーバの減衰力を変更制御する車両の減衰力制御装置を提供すること。
【解決手段】電気制御装置20は、バネ上上下方向加速度Xbfr'',Xbfl'',Xbrr'',Xbrl''と、ロール角加速度θr''およびピッチ角加速度θp''を入力する。そして、サスペンションECU21は、入力した6つの加速度と、予め設定されたバネ上上下方向加速度判定値Xbfr0'',Xbfl0'',Xbrr0'',Xbrl0''、ロール角加速度判定値θr0''およびピッチ角加速度判定値θp0''とを比較する。この比較により、少なくとも加速度Xbfr'',Xbfl'',Xbrr'',Xbrl''の一つが判定値Xbfr0'',Xbfl0'',Xbrr0'',Xbrl0''以上であれば、ECU21は、4輪位置のショックアブソーバの減衰力の変更開始を決定する。
(もっと読む)
減衰力制御装置
【課題】 アクチュエータの作動順序を適正に定めることにより減衰力制御性能の低下が抑えられた減衰力制御装置を提供すること。
【解決手段】 各輪バネ上加速度が予め設定された閾値加速度xb0"に達するまでの時間(閾値加速度到達時間)が短い順に従って各アクチュエータ132の作動順序が決定され、決定された作動順に各アクチュエータ132に作動制御信号が出力される。これにより入力振動が大きなサスペンション装置のダンパの減衰制御の開始の遅れが防止され、減衰力制御性能の低下が抑えられる。
(もっと読む)
減衰力制御装置
【課題】 アクティブスタビライザに異常が発生した場合であってもバネ上部材の振動の抑制効果の低下ができるだけ抑えられるようにダンパの減衰力特性を制御する減衰力制御装置を提供すること。
【解決手段】 後輪側スタビライザアクチュエータ23Rの作動がロックされる作動ロック異常が発生しているときに、各輪要求減衰力を計算する際に用いられるR式およびW式中の後輪側スタビライザ発生力を後輪異常時発生力FC_rに置き換えることによりR式およびW式をRb式およびWb式に補正する。この補正により、アクティブスタビライザが実際に発生する適正な力を考慮して各輪要求減衰力が算出される。このようにして算出された各輪要求減衰力に基づいて各ダンパの減衰力特性を制御することにより、作動ロック異常であるときでもバネ上部材HAの振動の抑制効果の低下が抑えられる。
(もっと読む)
減衰力制御装置
【課題】 ダンパの減衰力特性の制御に異常が生じたときであっても、バネ上部材の振動抑制に対する制御性能の悪化を抑えることができる減衰力制御装置を提供すること。
【解決手段】 例えば4個のダンパのうちの2個のダンパが異常ダンパであるときは、異常内容に応じて2個の異常ダンパの減衰力FNG1,FNG2が推定される。また、ヒーブ要求減衰力差|ΔH|,ロール要求減衰力差|ΔR|およびピッチ要求減衰力差|ΔP|の大小比較に基づいて、H式,R式,P式の中から正常ダンパについての正規の各輪要求減衰力を求めるために用いる2個の関係式が決定される。決定された2個の関係式から求められた各輪要求減衰力に基づいて、2個の正常ダンパの減衰力特性が制御される。
(もっと読む)
車両の減衰力制御装置
【課題】 ショックアブソーバの減衰力の変更に伴う変化量および応答性を考慮して各ショックアブソーバの減衰力を変更制御する車両の減衰力制御装置を提供すること。
【解決手段】 電気制御装置20は、バネ上部材HA(車体)のヒーブ挙動、ロール挙動およびピッチ挙動に伴う振動を減衰するために各ショックアブソーバ12が協働して発生すべき要求ヒーブ減衰力Fh、要求ロール減衰力Frおよび要求ピッチ減衰力Fpを計算する。そして、各ショックアブソーバ12の減衰力Ffr,Ffl,Frr,Frlを同時に変更する変数aをスイープさせて、これら要求ヒーブ減衰力Fh、要求ロール減衰力Frおよび要求ピッチ減衰力Fpを発生させる減衰力Ffr,Ffl,Frr,Frlを決定する。このとき、電気制御装置20は、減衰力Ffr,Ffl,Frr,Frlの変更に伴う全変化量を最小とする変数a1または変更に伴う応答性が最速となる変数a2を特定して減衰力Ffr,Ffl,Frr,Frlを決定する。
(もっと読む)
車両および車両状態推定装置
【課題】車両の挙動制御等に利用するため、既存の車載センサを用いて、各サスペンションの変位量を高精度で推定することができる車両等を提供する。
【解決手段】本発明の車両1によれば、車速センサ101、3軸加速度センサ102およびヨーレートセンサ103を用いて、グローバル座標系に対する車両座標系の姿勢を表わす第1姿勢因子と、グローバル座標系に対する慣性主軸座標系の姿勢を表わす第2姿勢因子とが算定される。第1および第2姿勢因子は、各サスペンションの車体Bへの取付態様を表わす付根ベクトルrmおよびサスベクトルsmとともに、車両1に作用する慣性力F1および外力F2のそれぞれの各サスペンションSmへの分配態様の決定因子となる。
(もっと読む)
車両制御装置
【課題】ドライバにとって快適な車両運動を実現することができるようにする。
【解決手段】走行環境検出部50によって走行路状態を検出し、操舵周波数検出部52によって操舵周波数を検出する。車両特性設定部54によって、走行路状態、操舵周波数、又は切り替えスイッチ18のオンオフ状態に基づいて、目標となる車両運動の特性を設定する。位相差決定部56によって、設定された車両運動特性に応じて、ヨー角速度の変化に対する横加速度の変化の位相差を示す第1変化差と、横加速度の変化に対するロール角速度の変化の位相差を示す第2変化差とを決定する。そして、操舵角制御部64によって、決定された第1変化差が実現されるように、前後輪の各々の操舵角を制御し、減衰特性ばね力制御部60によって、決定された第2変化差が実現されるように、サスペンションの減衰特性及びばね力を制御する。
(もっと読む)
車両の減衰力制御装置
【課題】 車両旋回時における姿勢変化を正確に判定し、適切に姿勢制御することができる車両の減衰力制御装置を提供すること。
【解決手段】 サスペンションECU21は、ステップS11にて操舵角θを用いて旋回を判定し、ステップS12にて操舵角θの変化量を用いて定常旋回状態を判定する。ステップS13においては、定常旋回状態におけるピッチ角加速度ω”の変化量が姿勢変化判定基準値αよりも大きいか否かを判定し、ステップS14にて車速Vの変化量が車速変化判定基準値βよりも大きいか否かを判定する。そして、ECU21は、旋回姿勢の変化が小さいまたは旋回姿勢の変化が大きく車速Vの変化が大きいときはステップS15にてショックアブソーバの減衰力を変更して制御する。一方、旋回姿勢の変化が大きく車速Vの変化が小さいときはステップS16にてアブソーバの減衰力を変更せずに維持する。
(もっと読む)
タイヤ位置可変車両
【課題】 走行中のタイヤ位置の変更によりホイールベースやトレッドベースが変更された場合であっても、要求された運動状態を実現できるタイヤ位置可変車両を提供する。
【解決手段】 駆動力制御部430は、車両の走行中にタイヤユニット300の位置が移動した場合、要求外力と移動タイヤユニット位置情報とに基づいて、駆動力変更後の各タイヤの駆動力の2乗の和が最小となるように、各タイヤの駆動力を変更する。
(もっと読む)
能動型サスペンション、および車両の姿勢変化抑制方法
【課題】走行状態などに応じて車両姿勢を適正に変化することを可能とする。
【解決手段】各車輪と車両1との間に介装された複数のアクチュエータの制御力を制御することで車両1の姿勢変化を制御する際に、車両1の走行状態などに応じた位置に適宜、設定変更される仮想制御線E1,E2を考え、その仮想制御線E1,E2に、車両1の姿勢が近づくように制御する。
(もっと読む)
車両の減衰力制御装置
【課題】 修正ピッチモーメントの算出精度を向上するとともに演算負荷を低減する。
【解決手段】 車体の目標ピッチ角θp*を、車体の実ロール角θrを用いて多項式近似した関数により付与する。修正ピッチモーメントΔMpは、目標ピッチ角を2回微分した値θp*ddと実ピッチ角を2回微分した値θpddとの差分値(θp*dd−θpdd)、および、目標ピッチ角θp*と実ピッチ角θpとの差分値(θp*−θp)に基づいて計算され、その計算にあたって、ばね上加速度センサの検出値を代数計算して得たロール角加速度θrdd、ピッチ角加速度θpddと、ロール角加速度の1階積分値,2階積分値と、ピッチ角加速度の2階積分値を用いることにより、微分演算処理を行わないようにした。
(もっと読む)
能動型サスペンション、及び車両の姿勢変化抑制方法
【課題】走行中の車両挙動等に応じて抑制制御の状態を自動的に調整する。
【解決手段】各車輪と車両との間に介装された複数のアクチュエータの制御力を制御することで、車両の姿勢変化を抑制する際に、自車両が走行している道路状態、運転者による運転操作、車両の挙動、および他の車両制御手段の作動状態の少なくとも1つに基づく車両の姿勢変化その他に関する変更情報によって位置が自動的に調整される仮想制御点Zaでの上下振動を抑制する制御力を上記複数のアクチュエータが出力するように構成する。
(もっと読む)
能動型サスペンション、及び車両の姿勢変化抑制方法
【課題】車両の姿勢変化を抑制するための制御をより簡便なモデルで実施する。
【解決手段】独立した2つの2輪モデルを想定して、前輪2輪のうちの一方の前輪に対応するアクチュエータの制御力と後輪2輪のうちの一方の後輪に対応するアクチュエータの制御力とで第1の仮想制御点Zaの上下振動を抑制すると共に、前輪2輪のうちの他方の前輪に対応するアクチュエータの制御力と後輪2輪のうちの他方の後輪に対応するアクチュエータの制御力とで第1の仮想制御点とは異なる第2の仮想制御点Zbの上下振動を抑制することで、車両の姿勢変化を抑制する。
(もっと読む)
能動型サスペンション、及び車両の姿勢変化抑制方法
【課題】所定位置の上下振動を抑えつつ、車両の姿勢変化をより有効に抑制する。
【解決手段】各車輪と車両との間に介装された複数のアクチュエータの制御力を制御することで車両の姿勢変化を抑制する際に、上記各アクチュエータの制御力を、上面視において位置が異なる2箇所の仮想制御点Za、Zbでの上下振動を共に抑制する制御力とする。
(もっと読む)
1 - 20 / 31
[ Back to top ]