
Fターム[3D301EC61]の内容
Fターム[3D301EC61]に分類される特許
1 - 20 / 56
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両のロール角推定方法及び装置

【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
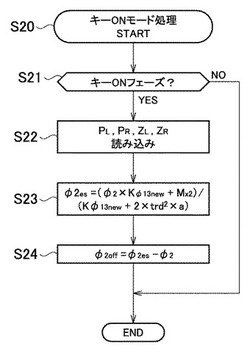
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車両状態量推定装置及びサスペンション荷重推定装置
【課題】車両状態量及びサスペンション荷重の推定精度が確保される車両状態量推定装置及びサスペンション荷重推定装置を提供する。
【解決手段】サスペンション荷重に伴うボディパネル1の歪量を、直接、ボディパネル1に取り付けられた半導体歪センサ3によって検出するので、車両走行時の荷重移動を高い精度で推定することができる。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
車高調整方法及び車高調整装置
【課題】人の乗車や荷物の積載時であっても、車高を調整することで車両の操縦安定性能や乗り心地等の動的なバランスが最適となるように車両の姿勢を制御可能とする車高調整方法及び車高調整装置を提供する。
【解決手段】少なくとも1輪に車高の調整を可能とする車高調整手段が設けられた車両のいずれかの1輪を加振手段により0〜6Hzの周波数の範囲で変化させながら上下方向に加振して当該車両全輪の輪荷重値の変化を測定し、加振の周波数と、測定された各輪の輪荷重値に基づいて車両のピッチロール伝達特性を設定し、当該ピッチロール伝達特性におけるゲインのピークとなる周波数より1Hz分周波数が高いときのピッチロール伝達特性における位相がゼロに近づくように車高調整手段を制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車両のサスペンション装置
【課題】 電磁アクチュエータの電動モータ31の過熱を防止する。
【解決手段】 モータフリー制御部53は、モータ温度Tmが過熱防止開始温度Tmaを超えていると判断した場合には、相間開放用リレーユニット54の各リレーR1,R2,R3をオフ状態にする。これにより、電動モータ31の過熱が防止される。この場合、エアバネ制御部150は、給排装置80からエアバネ装置20に圧縮空気を供給して、エアチャンバ26の内圧を上昇させて、エアバネ装置20のバネ定数を増加させる。これにより、電動モータ31が減衰力を発生できなくても、ストッパ当たりが低減される。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
サスペンション装置
【課題】 高周波振動入力時にダンパ装置が所望の減衰力を発生するように構成されたサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、モータ31の回転角速度Vmを取得する状態量演算部51と、状態量演算部51により取得された回転角速度Vmに基づいて、回転角速度Vmの高周波成分に対する減衰力(モータ減衰力fmの高周波成分)fm_filtを演算する減衰力演算部(524,525)と、モータ31が減衰力演算部により演算された減衰力を発生するように、モータ31が出力すべき目標制御力fを演算する目標制御力演算部526と、を備える。そして、目標制御力演算部526により演算された目標制御力fに基づいてモータ31を制御する。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
サスペンション装置
【課題】 アクチュエータのストッパ当たりが効果的に防止されるアクティブサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、電動アクチュエータ10と、電動アクチュエータ10の出力を制御するサスペンションECU30とを備える。サスペンションECU30は、バネ上部材の運動およびバネ下部材の運動を抑制するように、電動アクチュエータ10の出力を制御する第1制御と、電動アクチュエータの伸縮ストロークが、第1制御により電動アクチュエータ10の出力を制御した場合における電動アクチュエータ10の伸縮ストロークよりも小さくなるように、バネ上部材およびバネ下部材の上下変位および上下速度に基づいて、電動アクチュエータ10の出力を制御する第2制御とを、ストッパ当たりが発生する可能性が高いか否かに基づいて、切り換える。
(もっと読む)
ショックアブソーバ装置
【課題】電磁式ショックアブソーバの減速機の慣性の影響で乗り心地が悪化することを抑制する。
【解決手段】フィルタ処理部51は、誘起電圧の周波数とゲインとの関係を設定した周波数ゲイン特性を記憶しており、周波数ゲイン特性を使って、電圧センサにより検出した実誘起電圧Voutをフィルタ処理する。電圧比較部53は、フィルタ処理部51から出力されたフィルタ誘起電圧Vxと三角波発生部52から出力された三角波電圧Vrとを比較し、フィルタ誘起電圧Vxが三角波電圧Vrより大きくなる期間においてハイレベル信号を出力する。PWM制御信号出力部54は、ハイレベル信号を入力している期間において、スイッチング素子SW1,SW2をオン状態とする。
(もっと読む)
サスペンション装置
【課題】 温度条件に応じて最適な目標モータ力を出力するサスペンション制御装置を提供すること。
【解決手段】 液圧式ダンパ装置40の作動液の温度Tが検出され(S1)、次いで、液温−減衰係数マップを参照して減衰係数Csが決定される(S2)。その後、決定された減衰係数Csが(9)式中の直列伝達補償用伝達関数に代入され(S3)、さらに(9)式に基づいて目標モータ力fmotor*が計算される(S4)。そして、計算された目標モータ力fmotor*に対応する制御信号が出力される(S5)。作動液の温度に応じて適切な目標モータ力fmotor*が演算されるために、作動液の温度に起因する乗り心地の悪化が抑えられる。また、過剰な目標モータ力が要求されることが防止されるため、無駄な消費電力の発生が抑えられるとともに、過剰な目標モータ力による電気モータおよびその周辺のハード部品への熱害の影響を低減することができる。
(もっと読む)
サスペンション装置
【課題】目標アクチュエータ力を、ばね下部に作用させるばね下制御出力の大きさとサスペンション装置の制御系の安定性とを考慮して決定し、乗り心地の向上を図ることができるサスペンション装置を提供すること
【解決手段】サスペンション装置の電動モータ制御装置51は、電動モータの目標アクチュエータ力FPを決定する目標アクチュエータ力決定部60を有する。目標アクチュエータ力決定部60は、ばね下加速度g1に対して特定周波数領域の周波数成分のみ通過させるフィルタ処理部71と、ばね下部に作用させるばね下制御出力F1Bを演算するばね下制御出力演算部73と、電動モータとばね下部の間の伝達特性を表す伝達関数とばね下制御出力F1Bとを用いて要求アクチュエータ力F1Dを演算する要求アクチュエータ力演算部74と、電動モータとばね下部の間に介在する慣性体に生じる慣性力FMを演算する慣性力演算部75と、を備える。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
制御装置
【課題】位相ズレを緩和することができるだけでなくチューニングが容易な近似積分フィルタを提供することであり、また、制御装置の制御性能を向上することである。
【解決手段】上記した目的を達成するため、本発明の制御装置1は、制御対象Bの振動の加速度を検出する加速度センサ2と、加速度センサ2が出力する加速度信号から速度を得る近似積分フィルタ6と、速度に基づいて制御対象Bを制御する制御装置1において、近似積分フィルタ6の伝達関数を、ラプラス演算子をsとし、角周波数をωとし、nを3以上の整数、aを任意の正の数とした場合に、(sn−1+a・n・sn−2)/(s+ω)nとしたことを特徴とする。
(もっと読む)
車両空気力算出装置、車両運動解析装置及び車両サスペンション制御装置
【課題】車両が受ける空気力の作用について、さらに適切な解析を可能とすることである。
【解決手段】車両空気力算出装置10は、コンピュータで構成され、その記憶部18には風洞実験等によって得られた加速度項係数のデータ20等が記憶される。CPU12は、解析条件を取得する条件取得処理部24と、記憶部18に記憶される加速度項係数を用いて車両に作用する空気力の動的空力モデル化を行うモデル化処理部26と、車両に作用する空気力を外力としてその変動成分に関する算出を行う変動成分算出処理部28と、算出された変動成分に基づいて、車両に作用する外力をそれぞれ算出する作用量算出処理部30を含む。さらに、算出された空気力による外力を車両の運動方程式に組み込み車両の運動解析を行うこともでき、車両サスペンション制御を行うこともできる。
(もっと読む)
1 - 20 / 56
[ Back to top ]