
Fターム[3F022LL11]の内容
Fターム[3F022LL11]の下位に属するFターム
走行台車 (335)
Fターム[3F022LL11]に分類される特許
21 - 25 / 25
ターンテーブル装置
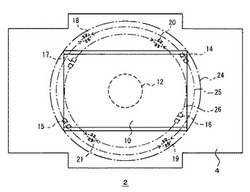
【課題】発塵や振動を増さずに、コンベヤを動作させて物品を進退させる際の、移載時の偏荷重による移載装置のたわみを制限する移載装置を提供する。
【解決手段】 ターンテーブル本体12上にコンベヤ10を搭載してターンテーブル装置8とする。ターンテーブル装置8の底面4箇所にスロープ14〜17を、台車4側にフリーローラ18〜21を配置し、コンベヤ10により物品を前進させた際のターンテーブル装置8のたわみを制限する。
(もっと読む)
搬送装置の衝突防止制御装置と方法

【課題】同一の走行レール上で往復動する搬送装置において、他機の移動前にその目的位置、移動方向、移動距離を高速かつ高い信頼性で検知でき、これに基づき、無駄な減速、停止、待機等を発生させずにリアルタイムで自機を制御でき、かつ他機に異常が生じた場合、他機を制御でき、これにより安全装置の多重化が可能となる搬送装置の衝突防止制御装置と方法を提供する。
【解決手段】同一の直線軌道3上を往復動する自機1及び他機2の搬送装置にそれぞれ搭載される搬送装置の衝突防止制御装置。この衝突防止制御装置は、自機と他機の離隔距離Aを非接触かつリアルタイムに直接検出する距離センサ12(レーザ距離計)と、自機と他機の目的位置、移動方向、移動距離を排他的かつリアルタイムに相互通信する相互通信装置14(パラレル光伝送装置)と、自機と他機の離隔距離と自機と他機の目的位置、移動方向、移動距離から、自機と他機の衝突を防止するように自機と他機を制御する走行制御装置16とを備える。
(もっと読む)
物品搬送装置
【課題】 移動体の異常状態を的確に判別することができる物品搬送装置の提供。
【解決手段】 物品搬送用の移動体を駆動させる駆動手段の作動を制御する制御手段が、移動体を設定加速度で増速させる増速運転、移動速度を維持して移動させる定常移動運転、および、設定減速度で減速させる減速運転を行う形態で移動させるために定められる目標速度にて移動体を移動させるべく、駆動手段の作動を制御し、移動体の移動中における移動体の移動状態または駆動手段の作動状態を移動中データとして検出する移動中データ検出手段が設けられ、制御手段が、移動中データ検出手段の検出情報に基づいて、移動体の移動開始から移動停止までの移動期間を区分けした複数の分割区間A1〜A4,V1〜V3ごとに求めた移動中データの分割データと比較用データとを比較して、移動体の異常状態を判別する異常状態判別処理を実行するように構成されている。
(もっと読む)
自動搬送システム
【課題】低コストの生産が可能な生産ラインの自動搬送システムを提供する。
【解決手段】複数の生産工程を経て生産されるワークを次工程に搬送する自動搬送システムにおいて、次工程がワークを受入可能か否かを判別する判別手段を備え、受入可能な場合に現工程から次工程にワークを搬送するとともに、受入できない場合に判別手段により次工程の受入可能時刻と現工程の次ワークの処理開始時刻とを比較し、次工程の受入可能時刻が早いときに現工程でワークを待機させる。
(もっと読む)
高処理量AMHSのためのモジュール式ターミナル
本発明は、容器を第1の輸送システムと第2の輸送システムの間で輸送するための装置に関する。1つの実施形態では、第1の輸送システムは、天井ベースコンベヤ(20a,20b)を含み、第2の輸送システムは、床ベースコンベヤ(30)を有する。本発明による装置は、共通の垂直方向平面(150)の周辺で、輸送システムのうちの1つ(20a,20b)の区画と整列して実質的に水平方向に延びる格納棚(104a〜104d)を有する。輸送システム(20a,20b,30)は、半導体製造設備内の格納能力を追加するために、最も上の格納棚(104a)の真上又は最も下の格納棚(104d)の真下に配置される。垂直モジュール(102a,102b)は、容器(2)を輸送システム(20a,20b)と少なくとも1つの格納棚(104a,104b)との間で輸送する。 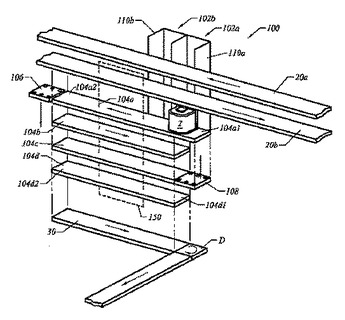 (もっと読む)
(もっと読む)
21 - 25 / 25
[ Back to top ]