
Fターム[3F022MM53]の内容
Fターム[3F022MM53]に分類される特許
1 - 18 / 18
移動ラック装置
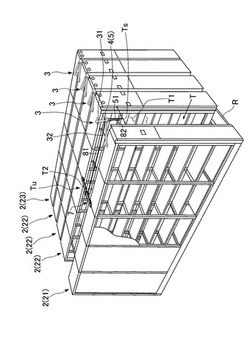
【課題】比較的簡単な構成を付加するだけで、長周期振動に対する適切な備えとなし得るようにした移動ラック装置を提供する。
【解決手段】複数のラック2をレールRに沿って移動可能に構成するにあたり、両端に位置するラック21、23を、固定手段を用いて端部位置に移動不能に固定するとともに、これらのラック21、23の内側に位置するラック22をレールRに沿って隣接するラック2との間に最大通路Tsが形成される範囲で正逆移動可能に構成し、さらに少なくとも一部の隣接するラック21、22間にわたって最大通路Tsが形成された状態で略直線状をなして突っ張ることで固定手段と協働して一方の端部位置から他方の端部位置までの全てのラック2を移動不能に一体化する耐震用拘束手段7と、この耐震用拘束手段7の突っ張り状態を解除する拘束解除手段とからなる耐震ユニットTuを設ける。
(もっと読む)
物品搬送設備

【課題】移動体を制動できない状態で移動体の移動を開始することを防止できる物品搬送設備を提供すること。
【解決手段】駆動手段(M1)にて移動自在な物品搬送用の移動体と、移動体の移動を制動する制動状態と制動解除状態とに切り換え自在な制動手段(B)と、駆動手段及び制動手段を制御する制御手段(7)とが設けられ、制御手段が、制動手段を制動状態にし且つ駆動手段を駆動させるべく駆動手段及び制動手段を制御する制動状態確認用処理を制動状態確認用タイミングにおいて実行するように構成されている物品搬送設備。
(もっと読む)
搬送車用の送信機
【課題】作業者の操作性を損なわせることなく、作業者の意思をより確実に反映させた状態で搬送車に対し走行の指示を行うこと。
【解決手段】有人運転モード及び無人運転モードの何れかで走行可能な牽引車に対し、無人運転モード時に遠隔操作によって走行を指示する送信機に、走行指示を行う際に操作する連続走行ボタン28a及び寸動走行ボタン28cと、これらのボタン操作を有効とするために操作する走行開始ボタン28dを設ける。そして、走行開始ボタン28dが操作されてから有効時間T1が経過する迄に連続走行ボタン28a又は寸動走行ボタン28cが操作されると、走行指示信号を送信する。また、有効時間T1の経過時迄に連続走行ボタン28a又は寸動走行ボタン28cが操作された場合、以降はこれらのボタン操作が終了してから有効時間T2が経過する迄に再びボタン操作されることにより走行指示信号を送信する。
(もっと読む)
物品搬送装置
【課題】長尺柔軟体の固有振動数が低い場合でも不都合がなく、かつ、走行体が停止するときに逆走しないような制振走行速度パターンを生成することができる物品搬送装置を提供すること。
【解決手段】制御手段(27)が、長尺柔軟体の振動を抑制するべく、振動抑制用の制振走行速度パターンを生成して、この制振走行速度パターンに基づいて走行駆動手段(HD)を作動させるフィードフォワード制御により走行体の走行を制御するように構成され、フィードフォワード制御として、長尺柔軟体の振動モデルの逆システムにより、制振走行速度パターンを生成するように構成されている物品搬送装置を構成した。
(もっと読む)
走行台車の脱輪防止装置
【課題】安定走行用のガイドローラの摩耗落下や破損した場合でも、走行台車の走行レールからの脱輪を未然に防止して安定走行を行うようにした走行台車の脱輪防止装置を提供すること。
【解決手段】走行台車側面で、走行車輪2より内側に走行レール側面と対向して配設した脱輪防止板5に、走行レール側面との位置関係を検出するセンサ6を配設する。
(もっと読む)
物品搬送装置
【課題】短尺物品及び長尺物品のいずれであっても搬送することが可能となるものでありながら、載置支持している物品の搬送姿勢がスタッカークレーンの走行に伴って乱れるおそれが少ない物品搬送装置を提供する。
【解決手段】収納棚とスタッカークレーンと作動を制御する制御手段とが備えられ、複数の物品移載装置の夫々に対応させて物品の走行経路の長手方向での位置を受止め規制する一対の位置規制部材57,58が備えられ、長尺物品Cが移載されたときの物品存在予定領域の下方側に位置することになる位置規制部材58が、位置規制用の作用位置と下方に引退する引退位置とに位置変更自在に構成され、短尺物品搬送処理状態において可動式の位置規制部材58を前記作用位置に切り換え、長尺物品搬送処理状態において可動式の位置規制部材58を前記引退位置に切り換える。
(もっと読む)
移動体の走行設備
【課題】移動体同士の衝突を簡素な構成により回避することができる移動体の走行設備を提供する。
【解決手段】走行駆動手段SM1,SM2を備えて有端形態の走行経路に沿って走行移動する一対の移動体3a,3bと、一方側の基準位置と移動体3aとの間の距離d1を検出する一方側距離検出手段DET1と、他方側の基準位置と移動体3bとの間の距離d2を検出する他方側距離検出手段DET2と、これらの検出手段の検出情報D1,D2に基づいて、一対の移動体3a,3bの走行作動を制御する制御手段Hとが設けられ、一方の移動体3aに、他方の移動体3bとの間の距離d3を検出する相対距離検出手段DET3が設けられ、制御手段Hが、一方側の基準位置と他方側の基準位置との間の距離情報d4に基づいて、検出情報D1,D2及び検出情報D3が適正判別用条件を満たさないと判別した場合は、一対の移動体3a,3bの走行を停止させる。
(もっと読む)
軌道端の緩衝構造
【課題】緩衝効果に優れしかも自動倉庫の大掛かりな設計変更を伴なうことのない軌道端
の緩衝構造を低コストで提供する。
【解決手段】軌道端の緩衝構造4は、スタッカークレーン3が走行する矢印X方向に延び
る2本の棒体5と、2本の棒体5のそれぞれの一端同士の間を連結する横架材6と、横架
材6を介して2本の棒体5に固定されたエンドストッパ7と、互いに車台8の走行する方
向に隔たる複数の摩擦接合部9とを備える。スタッカークレーン3がレール2を逸走しそ
うになり、エンドストッパ7に突き当たると、複数の摩擦接合部9に適度な滑りが生じて
、スタッカークレーン3の運動エネルギーを効果的に吸収できる。この過程で、スタッカ
ークレーン3は急制動され、レール2の端部から脱落する直前に停止する。
(もっと読む)
移動棚装置
【課題】移動棚装置における走行制御用センサーによる検出動作を安定させ、同時にコストダウンを図る。
【解決手段】移動棚2Aの走行方向側の棚1Aとの距離が設定距離L1になったことを検出して低速走行に切り換える減速用反射形光電センサー5と、当該走行方向側の棚1Aとの距離が前記設定距離L1より短い設定距離L2になったことを検出して制動停止させる制動用反射形光電センサー6とを備え、これら2つのセンサー5,6を、相対的に接近離間移動する隣り合う2つの棚1A,2Aの内、一方の棚2Aの棚本体2bを支持する底部フレーム2a内で当該底部フレーム2aに設けた開口10の内側に、光軸5a,6aが移動棚走行方向と平行になるように配設し、他方の棚1Aの底部フレーム1aには、前記反射形光電センサー5,6に対面するように反射板7を付設した構成。
(もっと読む)
物品搬送設備
【課題】開閉自在な遮蔽体により分断された両空間に亘って連続的に物品を搬送することができる物品搬送装置を提供すること。
【解決手段】走行経路Lを開閉自在な遮蔽体8が設けられ、走行経路Lの一端部P1の第1基準位置N1から走行体3までの距離を測距する第1光学式測距手段S1,12と、走行経路の他端部P2の第2基準位置N2から走行体までの距離を測距する第2光学式測距手段S2,13とが設けられ、制御手段が、遮蔽体8が開き状態にあるときに遮蔽体8の設置箇所を通過させるように走行体3の走行作動を制御し、且つ、遮蔽体8よりも走行経路Lの一端部側に走行体3が位置するときには第1光学式測距手段S1の測距情報に基づいて、かつ、遮蔽体8よりも走行経路Lの他端部側に走行体3が位置するときには第2光学式測距手段S2の測距情報に基づいて、走行体3の走行作動を制御するように構成されている物品搬送設備。
(もっと読む)
無人搬送車の運行制御方法
【課題】先行する無人搬送車の無駄な動き(空台車の追い出し)を極力少なくし、次から次へと発生する搬送要求を効率よく処理する無人搬送車の運行制御を提供すること。
【解決手段】床または天井に敷設された循環軌道に沿って走行可能な複数の無人搬送車が配備された無人搬送車の運行制御方法において、前記複数の無人搬送車が後方及び前方にそれぞれ反射型センサ及び反射板を備えており、後続の無人搬送車が先行する無人搬送車に近づくと前記先行する無人搬送車の前記反射型センサが反応し、その時になって初めて前記先行する無人搬送車が前記後続の無人搬送車の走行の邪魔にならないように、前記先行する無人搬送車の追い出し制御を行うことを特徴とした無人搬送車の運行制御方法
(もっと読む)
物流用棚装置
【課題】供給棚の下端面と排出棚の上端面との間の寸法を大きく設定した場合であっても、受入姿勢と搬送姿勢とに切り替え可能な切替棚の傾斜角度を小さく設定できる物流用棚装置を提供する。
【解決手段】搬送棚本体1に、搬送方向上流側の供給棚2から搬送されてくる被搬送物Wを、搬送方向下流側に配置した排出棚3に搬送するための切替棚4を設け、この切替棚4を、被搬送物Wを上流側の供給棚から受け入れるために切替棚4の供給棚2側が上向きになるように傾斜する受入姿勢4Aと、被搬送物Wを下流側の排出棚3に搬送するために切替棚4の排出棚3側が下向きになるように傾斜する搬送姿勢4Bとに切り替える物流用棚装置において、この切替棚4の支持機構5が、搬送姿勢4Bにある切替棚4の反排出棚側の高さ位置4bが、受入姿勢4Aにある切替棚4の反供給棚側の高さ位置4aより低位置で切替棚4を支持するようにするリンク機構51、52を備える。
(もっと読む)
移動棚の免震装置
【課題】 レール上に移動自在に並設している複数台の移動棚において、地震発生時にはその震動エネルギーを吸収して移動棚がレール端に設けているストッパに激突するのを防止する免震装置を提供する。
【解決手段】 レール2の端部にエアダンパ8を配設してこのエアダンパ8のピストンロッド8aの先端にレール2上を転動するローラ7を軸支し、地震発生時にレール2の端部側に向かって移動する移動棚3の車輪4とレール2の上面間の楔状空間部に上記ローラ7を食い込ませて車輪4の回転力を制動しながら後退させる。
(もっと読む)
搬送コンベア
【課題】作業者又は台車等が通行できる通路を形成すると共に、ワークの自重を動力源として利用して、安定してワークの搬送ができる搬送コンベアを提供すること。
【解決手段】搬送コンベア1は、送り側架台2と受け側架台6との間に通路用空間11を形成してなる。送り側架台2における載置コンベア部3は、送り側架台2上に待機する戻位置と、受け側架台6における受取コンベア部7に連結される出位置との間で移動可能である。搬送コンベア1は、載置コンベア部3に載置されたワーク8の自重によって、スライド部4が送り側架台2から突出して、載置コンベア部3を戻位置から出位置へ移動させ、載置コンベア部3から受取コンベア部7へワーク8が受け渡された後、付勢手段5による付勢力によってスライド部4が送り側架台2に収納されて、載置コンベア部3を出位置から戻位置へ復帰させるよう構成してある。
(もっと読む)
物品搬送装置
【課題】 構成の簡素化を図りながら、駆動用走行車輪のスリップによる不都合の発生を抑制できる物品搬送装置の提供。
【解決手段】 電動モータの駆動用電力を検出する電力検出手段が設けられ、走行制御手段が、増速運転を行うときの電動モータの回転速度に対する電動モータの駆動用電力の適正値Pを記憶して、増速運転の実行中において、電力検出手段にて検出される駆動用電力Dが適正値Pより設定量R小さいか否かを判別し、小さいことを判別したときには、増速運転における設定加速度および減速運転における設定減速度を小さくすべく補正するように構成されている。
(もっと読む)
入出庫装置
【課題】 機械式駐輪場における入出庫口での利用者の安全性を向上させる。
【解決手段】 利用者が駐輪場における二輪車の入出庫を行う入出庫装置において、前記二輪車を入出庫するための駐車場に設けられた入出庫扉に対する進入方向を限定するための防護部を有し、前記防護部は、前記二輪車が所定領域へ進入するのを検出するための進入検出部と、前記利用者を検出する人体検出部とを所定の位置に設けることにより、上記課題を解決する。
(もっと読む)
物品搬送装置
【課題】 走行体が軌道の端部に衝突するのを的確に回避できる物品搬送装置の提供。
【解決手段】 物品を搬送する走行体10が、有端形式の軌道上を走行するように設けられ、走行体10への電力供給が停止されるに伴って走行体を制動させる制動手段と、地上側に設置されて、軌道上での走行体の走行位置を検出する地上側位置検出手段25と、地上側に設置されて、走行体の走行速度を検出する地上側走行速度検出手段25と、走行体への電力供給を停止させる電力停止手段33とが設けられ、電力停止手段33が、地上側位置検出手段の検出情報および地上側走行速度検出手段の検出情報に基づいて、軌道の端部に向って走行する走行体の走行位置が異常監視用位置であり、かつ、そのときの走行体の走行速度が許容走行速度よりも大きくなる走行速度異常状態であると、走行体10への電力供給を停止させるように構成されている。
(もっと読む)
物品搬送車
【課題】 走行輪体のスリップを抑えることができる物品搬送車を提供する。
【解決手段】 駆動手段にて回転駆動されて走行レール2に沿って走行する走行輪体9と、走行レール2に対して上方への移動が規制されるように接触して走行輪体9の走行レール2からの浮上を規制する規制輪体21とを設け、その規制輪体21を、走行レール2に対して弾性体21aの弾性力にて接触圧力をもって接する状態で設ける。
(もっと読む)
1 - 18 / 18
[ Back to top ]