
Fターム[3F022NN00]の内容
倉庫・貯蔵装置 (25,393) | 機器の運転制御 (1,321)
Fターム[3F022NN00]の下位に属するFターム
Fターム[3F022NN00]に分類される特許
1 - 3 / 3
無人搬送車
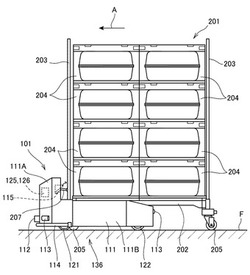
【課題】無人搬送車による被牽引台車の走行を安定させる。
【解決手段】無人搬送車101のベース111は、被牽引台車201をその幅方向Bに挟み込む形状をなしている。ベース111には、旋回自在の自在輪121と一対の固定輪122とが設けられる。無人搬送車101と被牽引台車201とが連結されると、無人搬送車101の一対の固定輪122は、被牽引台車201の固定キャスタ206を幅方向Bに挟み込む。 無人搬送車101の検知部116が製造現場等に布設されたガイド線GTを検知すると、無人搬送車101は、検知部116の検知結果に応じて進行する。
(もっと読む)
搬送装置

【課題】搬送装置を昇降方向に制振し、搬送装置と移載相手との受渡で物品への衝撃を小さくすること、及び搬送装置と移載相手との受渡で物品への衝撃をさらに小さくすること。
【解決手段】昇降台の高さを検出し、プーリ昇降台間の固有振動数f2を求める。ドラムプーリ間の固有振動数とプーリ昇降台間の固有振動数f2とに対し、これらの周波数域での制御量を小さくするように制振制御する。昇降停止後の物品の振動に対し、停止後の固有振動とスライドフォークの進出によるたわみとを打ち消すように、昇降モータを駆動する。
(もっと読む)
物品搬送車
【課題】 駆動モータの大型化を招くことなく、さらなる高速化を図る。
【解決手段】 車体の走行速度を検出する速度検出手段24が設けられ、前後一対の走行車輪13の夫々に対して、駆動モータ14が複数設けられ、走行制御手段28が、前後一対の走行車輪13の夫々について、複数の駆動モータ14のうち、一つの駆動モータ14に対しては、速度検出手段24にて検出される走行速度と目標走行速度との差に基づいて駆動モータ14を作動させる走行速度制御を行い、かつ、残りの駆動モータ14に対しては、走行速度制御を行う駆動モータ14による走行車輪13の回転駆動に対して干渉するのを抑制する形態で駆動モータ14を作動させる干渉抑制制御を行うように構成されている。
(もっと読む)
1 - 3 / 3
[ Back to top ]