
Fターム[3F022NN31]の内容
Fターム[3F022NN31]の下位に属するFターム
誘導方式 (33)
走行進路からのずれ補正 (7)
交通制御 (15)
Fターム[3F022NN31]に分類される特許
1 - 20 / 52
搬送システム
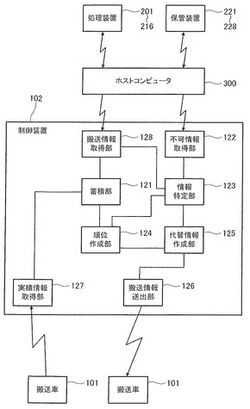
【課題】不具合が発生している搬送先の代替保管場所を決定する。
【解決手段】搬送車101と、搬送情報に基づき搬送車101を制御する制御装置102とを有し、制御装置102は、搬送した時間を示す実績時間情報と搬送情報とが関連づけられた情報である搬送実績情報を蓄積する蓄積部121と、荷物を受け取ることができない搬送先を示す不可情報を取得する不可情報取得部122と、不可情報に対応する搬送情報を特定する情報特定部123と、不可情報に対応する搬送実績情報を抽出し、抽出された実績時間情報に基づき搬送実績情報を順位付けする順位作成部124と、順位に従い決定される一つの搬送実績情報に含まれる起点情報を終点情報とする代替情報を作成する代替情報作成部とを備える。
(もっと読む)
自動搬送車及びそれを用いた自動搬送車システム

【課題】自動搬送車や移動ロボットを用いる搬送システムにおける搬送の効率を向上するために、システム中の自動搬送車や移動ロボットに被搬送物として台車を連結し、牽引させた場合、自動搬送車ないし移動ロボットの本体と台車が接触するなどの干渉をおこし、従来よりも搬送の効率を低下させる場合がある、という問題がある。本発明では、上記の問題を解決することを課題とする。
【解決手段】上記課題を解決するために、本発明の自動搬送車100は、自機を移動させる移動機構101と、台車200と連結および切り離しができる連結機構106と、台車200が連結されているか否かを検出する連結検出センサ107と、自機の周囲の情報を取得する外界センサ104と、上記移動機構101の制御を行う制御装置105と、を備え、台車200が連結されている場合には、台車200が連結されていない場合と異なる走行経路を走行することを特徴としている。
(もっと読む)
搬送車システム
【課題】不要な追い出し走行を行わずに、追い出しを実行できるようにする。
【解決手段】搬送車10は、コントローラ14の制御下で、予め定められた走行ルートを走行する。コントローラは、搬送車の現在位置と移動指令の有無と移動指令を有する搬送車の目的地とを把握する。コントローラは、移動指令を有する第1の搬送車の現在位置から所定の範囲内で、かつ目的地を越えない追い出し範囲内に位置し、移動指令を有さない第2の搬送車を検出して追い出し先を決定すると共に、第2の搬送車の現在位置から追い出し先までの範囲内に位置し、かつ移動指令を有さない第3の搬送車を検出して追い出し先を決定する。コントローラは、第3の搬送車が追い出し先へ先着でき、かつ第2の搬送車が、第3の搬送車を除いて、追い出し先へ先着できるか否かを判断し、先着できると判断された場合に、第2の搬送車及び第3の搬送車に追い出し先への移動を指令する。
(もっと読む)
移動駆動ユニットを位置させるシステムおよび方法
【課題】目録品を移送する方法を提供する。
【解決手段】目録品を移送する方法が、移動駆動ユニットの割り当て状態を判定することを含む。本方法はまた、前記移動駆動ユニットが現在、タスクを完了させつつあるのではないと判定するのに応答して、前記移動駆動ユニットの前記割り当て状態に基づいて前記移動駆動ユニットについてある位置を選択することも含む。本方法はさらに、選択された位置を同定する情報を前記移動駆動ユニットに送信することを含む。
(もっと読む)
目録品を移送するシステムおよび方法
【課題】目録品を移送する方法を提供する。
【解決手段】目録品を移送する方法が、移動駆動ユニットを作業スペース内の第一の点に移動させることを含む。第一の点は、目録品ホルダーの位置である。本方法はさらに、前記移動駆動ユニットを目録品ホルダーとドッキングさせ、前記移動駆動ユニットおよび前記目録品ホルダーを前記作業スペース内の第二の点に移動させることを含む。第二の点は、搬送設備に関連付けられている。本方法はさらに、前記目録品ホルダーを前記作業スペース内の第三の点に、前記搬送設備を使って移動させることを含む。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
搬送車システム
【課題】非接触給電方式を採用した搬送車システムにおいて、給電線とコアとの接触を減らす。
【解決手段】搬送車システムは、軌道と、給電線41と、複数の給電線ホルダ39と、搬送車と、ピックアップユニット59と、ガイド昇降機構65とを備えている。軌道は、分岐部を有する。給電線41は、軌道に沿って配置されている。給電線ホルダ39は間隔を空けて配置され、給電線ホルダ39の保持部45は鉛直方向に延びて給電線41を支持する。ピックアップユニット59は、搬送車に設けられ、給電線41に対して近接しており鉛直方向を向いた開口59aを有する。ガイド昇降機構65は、分岐部において、給電線41からピックアップユニット59を離れさせることができる。
(もっと読む)
方向傾き検出装置、および搬送システム
【課題】床面に貼付したテープを検出して進行方向を制御する従来の自動搬送車では、テープを検出できなくなる場合があった。
【解決手段】異なる高さに配置された第1の光センサ30、第2の光センサ31、32、第3の光センサ33を含み、搬送車の側面に取付けられる光センサユニット12を有する光センサ部と、第1の光センサの光が照射される、等間隔で配置された複数の直線状の第1の溝21と、第2の光センサの光が照射される、少なくともいずれかの第1の溝を延伸した位置に配置された直線状の第2の溝22、23と、第3の光センサの光が照射される反射面24とを有し、搬送路に沿って所定の間隔をおいて複数個配置される立体マーカ20とを備える。第2の溝は搬送路における前記立体マーカの位置を表しており、光センサ部は、搬送路における搬送車の位置を検出する位置検出部と、反射面に対する搬送車の傾きを検出する傾き検出部とを有する。
(もっと読む)
廃棄物処理システムとその方法
運搬管理システムにおける廃棄物の処理のための方法である。本方法は、第一の場所に関連するトリガーイベントの発生を検知すること、および、検知したトリガーイベントに応じて、移動運搬装置を第一の場所へ移動すること、を含む。本方法は、第一の場所において、移動運搬装置の上に廃棄物を載せること、および、移動運搬装置を使用して廃棄物を廃棄ステーションへ運搬すること、も含む。
代表図:【図1B】
(もっと読む)
データ処理装置及びデータ処理方法及びプログラム
【課題】多数の無線タグを読む際に、読み取り対象外のタグの誤読を回避する。
【解決手段】リーダ装置2において多数のタグからIDを読み取る際に、アンテナで受信された受信信号からID検出部236がタグのIDを検出するとともに、RSSI計測部237が受信時のRSSI(受信信号強度)を計測し、メモリ224がIDとRSSIを対応付けて記憶し、ラウンド制御部223が各タグのRSSIのレベルを解析し、RSSIのレベルが低いタグは読み取りのための規定位置に配置されていない読み取り対象外のタグと判断し、当該タグを排除して誤読を回避する。
(もっと読む)
搬送経路決定方法及び自動搬送システム
【課題】搬送元と搬送先との間で最適な搬送経路を設定することができる搬送経路決定方法及び自動搬送システムを提供する。
【解決手段】 自動搬送システム1は、各自動搬送設備を制御する制御盤7〜11と、管理コンピュータ12とを備えている。管理コンピュータ12は、コストテーブルが格納・記憶されたデータベース18と、各搬送設備の基本動作性能に応じた基準設備コストと各搬送設備の現在の稼動状況に応じた加重値とを乗算することで、各搬送設備の現在設備コストを算出し、コストテーブルにセットすると共に、経路No.毎に各搬送設備の現在設備コストを加算して搬送コストを算出し、コストテーブルにセットするコストテーブル更新部19と、搬送元と搬送先とが一致する複数の経路(搬送経路候補)のうち搬送コストが最も小さい搬送経路候補を搬送経路として選択する搬送経路設定部20とを有している。
(もっと読む)
移動体と搬送システム及び搬送方法
【課題】簡単な処理で、2次元あるいは3次元のスペースを移動する移動体間の干渉を防止する。
【解決手段】2次元方向に移動自在な搬送用の移動体2を複数設け、移動体2が移動する予定の軌跡を移動体2毎に算出する軌跡算出手段16と、他の移動体2が移動する予定の軌跡を把握する軌跡把握手段と、移動体2間の軌跡の重なりの有無を、軌跡が重なる箇所の通過時刻を無視して判定するための判定手段と、軌跡が重なると判定した際に、軌跡が重なる箇所を迂回するように迂回路を算出するための迂回路算出手段16、とを備える。
(もっと読む)
ストッカ制御システム及びストッカ制御方法
【課題】荷の重量によって倉庫施設内の保管場所を決定し、荷を効率よく搬入搬出して省エネルギーを図るストッカ制御システムを提供する。
【解決手段】荷の重量情報を少なくとも含む荷情報を記憶する荷情報記憶装置20と、倉庫施設の荷を保管可能な場所についての保管可能場所情報を少なくとも含む保管場所情報を記憶する保管場所情報記憶装置21と、荷情報及び保管場所情報を取得し、重量情報から荷重量による重みと保管可能場所情報から荷の移動負荷に対する重みとを算出して、荷重量による重みと移動負荷に対する重みを加算する重み付け法により総重みを算出し、総重みによって荷を保管する荷保管場所を決定する保管場所決定部10とを備える。
(もっと読む)
搬送システム
【課題】例えば半導体装置製造用の各種基板などの荷を搬送する搬送システムにおいて、基準データの配信時間をなるべく短くしつつ、基準データを効率よく配信する。
【解決手段】搬送システム(100)は、軌道(1)に係る基準データのうち修正が反映された基準データ部分である修正用データを生成するデータ生成手段(11)と、生成された修正用データをブロードキャスト方式で配信する配信手段(12)と、軌道に沿って荷を搬送可能である搬送車、配信された修正用データを受信する通信手段、受信された修正用データで更新され得る基準データに従って搬送させる搬送制御手段(4)、及び受信される修正用データの通信に係るエラーを検出するエラー検出手段(6)を夫々備える複数の搬送手段(3)と、エラーが検出された場合に、生成された修正用データを再度配信させる再配信制御手段(13)とを備える。
(もっと読む)
半導体製造システム
【課題】装置及び搬送のトラブルを迅速に把握する。
【解決手段】半導体製造システム70には、ホストコンピュータ1、CRレイアウト記憶装置2、統括生産情報システム3、装置管理システム4、搬送制御システム5、歩留統御システム6、半導体製造装置7a、半導体製造装置7n、LAN8、装置情報取得部11、搬送情報取得部12、生産情報取得部13、連動表示制御部14、連動表示部15、搬送指示部16が設けられる。連動表示制御部14、連動表示部15、及び搬送指示部16は、半導体製造自動化クリーンルームでの装置及び搬送のトラブルを迅速に把握してクリーンルームレイアウト画面に表示する。表示後、クリーンルームレイアウト画面上で搬送車を指定し、搬送車の移送径路の変更、移送先の半導体製造装置の変更を行う。
(もっと読む)
搬送システムにおける搬送経路の決定方法
【課題】搬送開始位置から目的位置まで複数ある搬送経路のうち、最小時間で搬送可能な搬送経路を選択して複数の搬送物を短時間内に搬送するようにした搬送システムにおける搬送経路の決定方法を提供すること。
【解決手段】搬送開始位置Xから目的位置Zまで複数ある搬送経路A,Bのうちその1つの搬送経路A,Bを選択して複数の搬送物を搬送するようにした搬送システムにおいて、各搬送経路A,Bにおける搬送時間と待機位置14,15,24,25で待機している待機時間により搬送開始位置Xから目的位置Zに到着するまでの搬送所要時間を計算で求め、各搬送経路A,Bの搬送所要時間を比較して最小時間で搬送可能な搬送経路A,Bを決定して搬送するようにする。
(もっと読む)
搬送システム及び搬送方法
【課題】低コストで安定した搬送を実現できる搬送システム及び搬送方法を提供する。
【解決手段】床面2に間隔を隔てて設置された脚3と、脚3の頂部に着脱可能に載置されたスペーサ4と、スペーサ4の上に脚3を架け渡して載置された被搬送物5を搬送すべく床面2を走行する台車6とを備え、台車6は、台車6が床面2を脚3の間を通過するX方向に走行するために台車本体に昇降不能に設けられた第1走行車輪15と、台車6が床面2をX方向と交差するY方向に走行するために台車本体に昇降可能に設けられた第2走行車輪16と、第2走行車輪16を2段階に昇降させ、第2走行車輪16の下端が第1走行車輪15の下端よりも上の上昇位置と下の下降位置とに切り替える昇降手段とを有する。
(もっと読む)
入庫引当て装置及び入庫引当て方法
【課題】ある特定の自動倉庫への荷の搬入が滞ったとしても、他の自動倉庫への搬送ができなくなってしまうことを避けることができる入庫引当て装置及び入庫引当て方法を提供すること。
【解決手段】在庫管理コンピュータは、ステップS25の処理にて最も古い日時に引当てられた自動倉庫を仮引当てし、ステップS26の処理にてその仮引当てした自動倉庫に関わる荷の在荷数がN−1以下のときのみステップS27の処理にて搬送指示をコンベア制御盤へ送信する。また、仮引当てした倉庫に関わる荷の在荷数がN−1以下でないときには、ステップS28の処理にて次に最も古い日時に引当てられた自動倉庫を仮引当てし、ステップS29の処理にてその仮引当てした自動倉庫に関わる荷の在荷数がN−1以下のときのみステップS27の処理にて搬送指示をコンベア制御盤へ送信する。
(もっと読む)
自動倉庫
【課題】バッファ機能を持たせた移載棚を、入庫用と出庫用とで分けて設けることで効率的な入出庫作業を行えると共に、出庫用の構成部分が故障等で動作できない場合にも、出庫できるようにすること。
【解決手段】格納棚10と、複数の物品Wを個別停止させつつ搬送可能でかつ物品Wを1つずつ逆方向に向けて搬送可能な複数の入庫用移載棚20と、複数の物品Wを個別停止させつつ搬送可能な複数の出庫用移載棚40と、入庫用移載棚20及び出庫用移載棚40と格納棚10との間で物品Wを移載可能な複数の入出庫移載台車60と、物品Wを昇降移動可能に構成され、各入庫用移載棚20に対して物品を受渡し可能に構成されると共に、各出庫用移載棚40に対して物品を受取可能に構成された昇降機構部30,50とを備える。非常出庫モードでは、各入庫用移載棚20で物品Wを1つずつ逆方向に向けて搬送して、格納棚10から物品Wを出庫する。
(もっと読む)
搬送システム、搬送車管理装置、および搬送制御方法
【課題】搬送回数の変化に応じて搬送時間を最適化することが可能な搬送システムを提供すること。
【解決手段】第1の軌道を走行して搬送物を搬送する複数の無人搬送車と、第1の軌道に通じ、複数の無人搬送車が待機するための第2の軌道と、搬送制御装置と、搬送車管理装置と、を具備し、複数の無人搬送車は、搬送制御装置の制御に基づいて搬送物を搬送すると、搬送完了情報を搬送制御装置へ送信し、搬送制御装置は、搬送完了情報を受信すると、搬送時間を算出し、搬送実施情報を搬送車管理装置へ送信する第1の制御部を有し、搬送車管理装置は、搬送実施情報の一覧を示す履歴データを格納する記憶部と、搬送実施情報を受信すると記憶部に格納させ、履歴データを用いて搬送回数の合計値および搬送時間の平均値をそれぞれ算出し、合計値および平均値に応じて第1の軌道を走行する無人搬送車の台数を、搬送制御装置を通じて制御する第2の制御部と、を有する。
(もっと読む)
1 - 20 / 52
[ Back to top ]