
Fターム[3F022NN32]の内容
Fターム[3F022NN32]の下位に属するFターム
遠隔操作 (5)
Fターム[3F022NN32]に分類される特許
1 - 20 / 28
無人搬送車
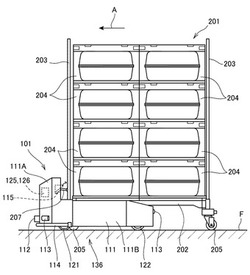
【課題】無人搬送車による被牽引台車の走行を安定させる。
【解決手段】無人搬送車101のベース111は、被牽引台車201をその幅方向Bに挟み込む形状をなしている。ベース111には、旋回自在の自在輪121と一対の固定輪122とが設けられる。無人搬送車101と被牽引台車201とが連結されると、無人搬送車101の一対の固定輪122は、被牽引台車201の固定キャスタ206を幅方向Bに挟み込む。 無人搬送車101の検知部116が製造現場等に布設されたガイド線GTを検知すると、無人搬送車101は、検知部116の検知結果に応じて進行する。
(もっと読む)
ストアシステム

【課題】管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更等に対して柔軟性のあるストアシステムを提供する。
【解決手段】無人搬送車2が自走する搬送ルートは、ストアエリア11の所定位置に、ワークWを収容した被搬送台車3aを搬入する搬入ルート15と、ストアエリア11の所定位置から、ワークWを収容した被搬送台車3aを搬出する搬出ルート17とに互いに独立して構成されるので、管理システム側の管理データを増大させることなく、ワークWの先入先出が効率的に実施可能で、工程変更等に対して柔軟性を有するようになる。
(もっと読む)
無人搬送システム
【課題】施工に手間がかかるとともに汚れや損傷に弱い分岐指示用部材を不要とし、無人搬送車を誘導ラインに沿って目的地まで確実に走行制御可能な、無人搬送システムを提供する。
【解決手段】無人搬送システム1は、分岐部G〜Jを有し複数の走行路を形成する複数の誘導ラインLと、誘導ラインに沿って走行する無人搬送車2と、誘導ラインを含む画像を撮像する撮像装置3と、この画像に関する画像情報に基づいて誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御する走行制御装置4と、を備える。各誘導ラインは互いに異なる色の識別パターンからなる。走行制御装置は、現在地および目的地を結ぶ誘導ラインを設定し、画像の誘導ラインの識別パターンと設定した誘導ラインの識別パターンとを照合しながら、設定した識別パターンの誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御するように、構成されている。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて物品とステーションとの位置決め精度を向上させる。
【解決手段】搬送車システム1において、第1アーム49は、物品7を保持する。第1垂直面45aは、平面視で第1水平方向に延びている。第1垂直面45aには、第1基準マーク51が設けられている。搬送車3は、搬送車本体11と、移載機構12と、制御部とを有している。移載機構12は、物品7を移載する。移載機構12は、第1支持部材25と、移動機構13,19,21,23とを有している。第1支持部材25には、物品7が支持される。移動機構は、搬送車本体11が第1垂直面45aに対して第1水平方向に直交する第2水平方向に対向した位置で停止した状態において、第1支持部材25を、水平旋回方向θ、第1水平方向、上下方向に移動する。
(もっと読む)
自律走行搬送システム
【課題】どのような経路であってもその経路に沿って搬送することができ、且つ経路から外れた場合に迅速、且つ的確にもとの経路に戻ることができる自律走行搬送システムを提供する。
【解決手段】搬送経路に配置された複数のICタグと、走行駆動機構と、前記ICタグの情報を読み取るタグリーダと、これらの走行駆動機構とタグリーダの動作をコントロールする制御部とを備え位置を把握しながら搬送経路に沿って走行する搬送台車とにより構成され、制御部は、搬送経路に関するマップ情報を格納するメモリと、ICタグ情報とマップ情報に基づいてドライバをコントロールするCPUとを備え、CPUは、前記マップ情報を基に搬送台車をICタグの間で自律走行させる一方、複数のタグリーダからのICタグ情報により搬送台車の搬送経路からのずれを検出してドライバに走行修正信号を送付するようにした。
(もっと読む)
物品搬送設備
【課題】複数の第1物品搬送対象箇所の間での物品の搬送と複数の第2物品搬送対象箇所の間での物品の搬送との双方を継続して行える物品搬送設備を提供する。
【解決手段】第2走行経路12bを第1搬送経路12aから離間した状態で設定し、第1走行経路12aと第2走行経路12bとを接続する補助走行経路12cを設定して、通常走行制御により、第1搬送台車5aを第1走行経路12aのみに沿って走行させ、且つ、第2搬送台車5bを第2走行経路12bのみに沿って走行させ、非常走行制御により、第1搬送台車5a及び第2搬送台車5bのうちの一方の搬送台車5を第1走行経路12a、第2走行経路12b及び補助走行経路12cに沿って走行させる。
(もっと読む)
処理設備
【課題】被処理物に対して処理を行って処理物を得る複数の工程室と、被処理物または処理物からなる被搬送物を搬送容器に収納して搬送し、これら工程室に対して搬送容器の受け渡しを行う搬送領域とが設けられた処理設備において、工場の配置レイアウトの自由度が大きい処理設備を提供する。
【解決手段】複数の工程室21が平面的に配置された処理フロア1の階上に、搬送容器Cの搬送を行う物流フロアを設けると共に、処理フロアと物流フロアとの間の天井面11に受け渡し口を形成し、物流フロアを走行する搬送車5により受け渡し口を介して処理フロアと物流フロアとの間において搬送容器Cの受け渡しを行う。そして、物流フロアにおいて、搬送車5の走行する搬送路に沿って、搬送容器Cを載置するための棚71を設ける。
(もっと読む)
無人搬送車および走行制御方法
【課題】番地による移動場所の指定を用いつつ、座標系による走行が可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】レーザにより周辺環境の状況を計測して、地図データ122と計測により得られる計測データ121とをマッチングして、現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行する無人搬送車1であって、無人搬送車1が走行する走行エリアにおける所定の場所である番地と、走行エリアに設定されている座標との対応情報を格納しているデータメモリ120と、ホストコンピュータ2から移動の目標位置を番地で指定されると、番地および座標の対応情報を基に、指定された番地を座標に変換し、番地に対応する座標まで、経路データ123に従って無人搬送車1を走行させる処理部111と、を有することを特徴とする。
(もっと読む)
走行台車システム
【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
物品管理システム及び無線タグ通信装置
【課題】無線タグの情報の読み取り漏れが生じないようにすることができる物品管理システム及び無線タグ通信装置を提供する。
【解決手段】無線タグと無線タグ通信装置とを有し、無線タグ通信装置は、無線タグ通信装置の移動開始の原点に関する情報である原点情報を取得する原点情報取得手段と、無線タグ通信装置の移動ベクトル量を検出する移動ベクトル量検出手段と、原点と、原点から前記無線タグ通信装置を移動させる場合に、無線タグと情報の送受信が可能な移動に関するガイダンス情報とを関連付けて記憶した記憶手段から、原点情報取得手段により取得された原点情報に対応するガイダンス情報を取得するガイダンス情報取得手段と、ガイダンス情報取得手段により取得したガイダンス情報に基づき、移動ベクトル量検出手段により検出された移動ベクトル量に応じて、無線タグ通信装置の移動させるべき方向を報知する報知手段とを備えたことを特徴とする。
(もっと読む)
保管用設備、並びに特にこの設備用の倉庫ラック及び荷役機械
本発明は保管用設備に関し、柱脚上に設置された棚(14)を備えた倉庫ラックと、その倉庫ラックの指定の棚まで移動することが可能な荷役機械と、商品若しくは商品を保管するための保管装置(30)を棚(14)に載置し又は棚(14)からそれらを取り出して指定の場所まで移動させることが可能な荷役装置と、を具備する。受動昇降装置(240)は倉庫ラック(10)と連結され、荷役機械(100)は指定の経路上を移動できる移動式荷役機械として作られ、荷役装置(130)は荷役機械(100)に載置され、荷役機械(100)上には能動昇降装置(200)がある。この能動昇降装置は、受動昇降装置(240)と結合するとともに、その受動昇降装置(240)と協働して荷役機械(100)を指定の棚まで送達することができる。本発明は更に能動昇降装置(200)を設けられた移動式荷役機械(100)及び受動昇降装置(240)を搭載された倉庫ラック(10)にも関連している。  (もっと読む)
(もっと読む)
積込装置
【課題】部品が収容されたパレットを無動力で無人搬送車に積み込むことのできる積込装置を提供する。
【解決手段】本積込装置1は、部品2が収容されるパレット3を滑動させる滑動面5を有し、該滑動面5が下方傾斜する積込シュータ4と、該積込シュータ4の滑動面5の下端に備えられ、パレット3の滑動を停止及び開放するシュータ側ストッパ11と、搬送台車6に備えられ、パレット3を滑動させる滑動面10を有し、該滑動面10が積込シュータ4の滑動面5と略同一平面を形成するように下方傾斜する受け台8と、を備えているので、部品2が収容されたパレット3を無動力で搬送台車6に積み込むことができる。
(もっと読む)
無人搬送車を用いた作業システム
【課題】 少ないAGVを用いて並列に配置された作業ゾーンに、効率よくワークを搬送する。
【解決手段】 AGVは台車を着脱可能に連結するとともに、誘導経路が、分岐点と合流点との間に作業ゾーンがそれぞれ配置された複数の分岐路と、合流点から作業が完了したワークを回収する回収ゾーンに至る経路と、合流点と分岐点の間の巡回経路とを有し、各作業ゾーンについて、ワークに対する作業が完了した、または最も早く完了するゾーンを検出する作業完了ゾーン検出手段と、ワークを搭載した台車を牽引するAGVを作業ゾーンに移動させた後、該台車との連結を解除させ、連結解除状態のAGVを巡回経路及び分岐点を経由して作業完了ゾーン検出手段で検出した作業ゾーンに移動させるとともに、該作業ゾーンにおいて、該AGVに作業が完了したワークを搭載した台車を連結させ、これを合流点を経由して回収ゾーンに移動させるAGV制御手段とを有する。
(もっと読む)
移動棚設備
【課題】本発明は、シートレール状の被検出体を使用せずに、移動棚の幅ずれ制御を実行できる移動棚設備を提供することを目的とする。
【解決手段】床面の各移動棚の停止位置に、被検出体としてマグネットを設け、各移動棚に、前記マグネットを検出する磁気センサを設け、移動棚11が走行を停止すると磁気センサによりマグネットを検出し、検出した磁気感度が、前回の走行停止時に検出した磁気感度より所定値以上変化していると、すなわち所定値より大きい幅ずれを検出すると、この幅ずれを解消する移動棚の走行軌跡を求め、次の走行時に、前記走行軌跡に沿うように各駆動モータの回転速度を制御する構成とする。
(もっと読む)
コンテナヤード及びヤードクレーン並びに位置検出装置
【課題】土地利用率の向上を図るとともにヤードクレーンの安定した自律走行を補償することを目的とする。
【解決手段】コンテナヤードにおいて、荷役作業エリアAの路面に荷役作業用ガイドライン50を敷設するとともに、該荷役作業用ガイドライン50と異なる磁気情報を有する特設用ガイドライン51を特設エリアBの路面に敷設する。
(もっと読む)
自動倉庫
【課題】ロール状物品などを保管用シャフトを介して格納する自動倉庫において、シャフトを物品の芯管内への挿脱するための平面スペースを削減し、建屋としての容積効率を向上する。
【解決手段】自動倉庫内の物品格納スペースSの一部の区画スペースに、シャフト挿脱装置SA1を装備するとともに、その隣接スペースに物品を一時的に待機させシャフト5の脱着操作を行うための物品待機部を設けることにより、自動倉庫のラックを有効に利用してシャフト挿脱のための特別なスペースをラック外に不要とした。
(もっと読む)
走行車システム
【構成】 走行ルートの周回距離Lとこれを複数に分割した分割距離Pとを記憶し、エンコーダ信号eから e modP=d e=cP+d となる値c,dを求めて、(c,d)を現在位置とする。
【効果】 1個の基準マークでかつ簡単な補正演算により、エンコーダへの補正を施すことができる。
(もっと読む)
台車連結構造
【課題】簡単な構成によって搬送装置に対して台車を位置決めして連結できる台車連結構造を提供する。
【解決手段】台車30は、挟持高さ位置で平行に延在する一対の基部37と、各基部37の端部から突出方向に移行するにしたがって漸次互いに接近する方向に移行する一対の折曲部38と、各折曲部の先端部から互いに接近する方向に向かって延出する被挟持部39とからなる連結部35を有する。搬送ロボット40は、挟持高さ位置で搬送ロボット40の左右に延在して前後方向に接近する第1腕部61と第2腕部71を有し、第2腕部71は、左右の側端縁部71c、71dの離間距離が一対の折曲部38の先端部間の離間距離と同一の大きさを有する。そして、第2腕部71を基部37側に配置し、第1腕部61と第2腕部71を接近させて被挟持部39を挟持する。
(もっと読む)
物品を仕分けする方法および機器
【解決手段】 複数の仕分け先に物品を仕分けする方法および機器が提供される。前記物品は、複数の個別制御される送達車両の1つに載せられる。前記送達車両は、前記仕分け先へ当該送達車両を案内(誘導)する軌道を進み、前記仕分け先は前記軌道に沿って位置する。前記送達車両は、適切な仕分け先に到着すると、当該仕分け先に前記物品を排出し、送達すべき別の物品を受け取るため戻る。
(もっと読む)
走行台車と走行台車システム
【構成】 目標の合計トルクと加速度センサで求めた加速度とを、トルク配分部22に入力するする。トルク配分テーブル61に前後の駆動輪へのトルクの配分率を加速度に対して記載し、トルク配分率と目標トルクとから演算部62で前輪トルクと後輪トルクとを決定する。
【効果】 走行台車の実際の加速度に応じて、トルクを前後の駆動輪に最適配分できる。
(もっと読む)
1 - 20 / 28
[ Back to top ]