
Fターム[3F204DB00]の内容
クレーンの細部(制御、安全) (2,955) | 位置の検出(表示)対象 (174)
Fターム[3F204DB00]の下位に属するFターム
クレーンの位置 (54)
被搬送物の位置 (32)
クレーンと被搬送物の相対位置 (84)
Fターム[3F204DB00]に分類される特許
1 - 4 / 4
吊荷下方の監視システム及び監視方法
【課題】吊荷の搬入作業において作業員数を削減でき、かつ、吊荷と障害物の位置関係を明確にした画像を生成することができる吊荷下方の監視システム及び監視方法を提供することを目的としている。
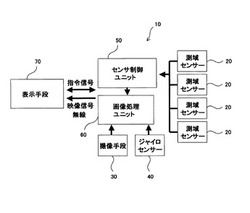
【解決手段】本発明の吊荷下方の監視システム10は、吊荷12の周辺をセンシングする測域センサー20と、前記吊荷12の下方を撮像する撮像手段30と、前記測域センサー20の測定領域から前記吊荷12の干渉物17を認識する認識領域を設定するセンサー制御ユニット50と、前記撮像手段30の撮像画像に吊荷モデルを形成し、前記測域センサー20の測定値に基づいて、前記吊荷モデル上に前記障害物の位置又は/及び距離情報を生成する画像処理ユニット60と、前記画像処理ユニット60で生成された処理画像を表示する表示手段70と、を備えたことを特徴としている。
(もっと読む)
クレーンの安全確認装置

【課題】安全性と実用性に優れたクレーンの安全確認装置を提供する。
【解決手段】吊荷10の下方領域を含むクレーン周辺領域を上方から撮像するためのカメラ9a〜9eと、カメラ9a〜9eによって撮像されたクレーン周辺領域の画像を表示するために運転室に設けられたモニターと、カメラ9a〜9eによって撮像されたクレーン周辺領域の画像から作業者WのヘルメットHを認識する認識部を備える。認識部によって認識されたヘルメットHの画像を、モニターに表示されたクレーン周辺領域の画像に表示するように構成した。
(もっと読む)
画像処理装置、荷物搬送設備、及びプログラム
【課題】最適な方法で3次元マップを生成できる画像処理装置、荷物搬送設備、及びそのプログラムを提供する。
【解決手段】荷物搬送設備100の制御部70は、カメラ10を移動させて、二地点において撮像させた二枚の2次元画像に基づいて部分的な3次元マップを生成する3次元マップ生成手段を備える。制御部70は、予め、ガイドレール90上の各地点からカメラ10に撮影させて、それらの画像から全体の3次元マップを生成して記憶させる。制御部70は、記憶している全体の3次元マップに基づいて、任意の撮像対象地点を見通せる地点を導出し、その地点の近傍でカメラ10に撮像対象地点が撮影できた3次元マップが生成できるまで撮像させ、その部分の3次元マップを生成し、撮影対象地点の3次元マップを取得する。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
1 - 4 / 4
[ Back to top ]