
Fターム[3F204DB04]の内容
クレーンの細部(制御、安全) (2,955) | 位置の検出(表示)対象 (174) | 被搬送物の位置 (32)
Fターム[3F204DB04]に分類される特許
1 - 20 / 32
吊荷周辺の物体の高さ情報通知システム
クレーンの操作システム
洋上荷役システム及びこれを備えた洋上浮遊体
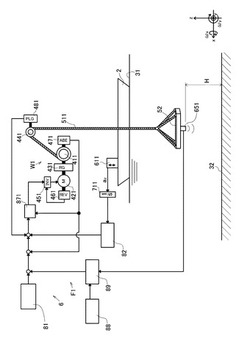
【課題】吊荷の水中高度を精度良く維持しつつ上下動を抑制することが可能な洋上荷役システムを提供する。
【解決手段】洋上浮遊体に取付けられるウィンチ等の荷役機構W1と、荷役機構W1より引き出され吊荷52を懸架するワイヤロープ511と、ワイヤロープ511の引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1を制御する制御手段6とを具備するものであって、制御手段6が、吊荷52に設けられる海底31との距離を測る水中高度検出部651と、吊荷52の水中高度Hを制御するためのワイヤロープ511の引き出し量補正値を水中高度検出部651からの検出値に基づいて出力する高度補正指令部88とを備え、高度補正指令部88からの出力値をフィードバックして荷役機構W1の制御を行うように構成した。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体

【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
荷役用クレーンの走行位置制御装置
【課題】荷役用クレーンの走行位置をコンテナに的確且つ速やかに一致させると共に、手間やコスト増を抑制するる。
【解決手段】走行レール上を走行し、その走行方向に隙間を空けて並べられた複数コンテナ3のうち対象コンテナの中心位置に、走行位置を合わせてコンテナを荷役する荷役用クレーンの走行位置制御装置において、走行方向について荷役用クレーンと同期して移動し、走査角度範囲内16に複数コンテナ3が含まれるように取り付けられ、走査角度ごとにコンテナ表面までの距離を計測する走査型の距離計10を備える。計測された距離とその走査角度18とを関連付けた測定データを記憶する。記憶された複数の測定データに基づいて対象コンテナの中心位置と荷役用クレーンの位置との走行方向に関する相対距離を算出する。相対距離を零に近づけるように荷役用クレーンを走行させる。
(もっと読む)
移載システム
【課題】横移載時にも被搬送物を載置台の所定位置に移載する。
【解決手段】移載システム(100)は、天井に敷設された軌道(1)に沿って走行しつつ被搬送物(3)を搬送する搬送車(2)と、軌道より下方に設けられる載置台(4)との間で被搬送物が横移載方式で移載可能である。移載システムは、(i)搬送車に把持される被搬送物を載置台の所定位置に載置する載置動作を行う際の被搬送物の移載位置を表す載置位置情報、及び(ii)載置台上の被搬送物を搬送車が把持する把持動作を行う際の被搬送物の移載位置を表す把持位置情報を記憶する記憶手段(101)と、載置動作を行う場合、載置位置情報の移載位置で移載が行われるように、他方、把持動作を行う場合、把持位置情報の移載位置で移載が行われるように搬送車を制御する制御手段(102)とを備える。
(もっと読む)
スラブ搬送装置
【課題】熱間圧延スラブをクレーンで搬送するスラブ搬送装置として、熱間圧延スラブの垂れによる他の設備との接触を適切に防止することができるスラブ搬送装置を提供する。
【解決手段】熱間圧延スラブ2をクレーン10で搬送するスラブ搬送装置であって、搬送する熱間圧延スラブ2の垂れを検知する垂れ検知センサー11を備えている。
(もっと読む)
コイル多段積み方法
【課題】安全なコイルの段積み方法
【解決手段】コイルを多段積み方法において、その上段に載置するコイルと、該上段コイルと接触し、既にスキッドに載置されている2つの下段コイルにおけるコイルとスキッドあるいはコイル同士の接触点において発生する抗力がゼロ以上コイル耐荷重未満で、且つ、下段コイルの重心周りのモーメント力がつり合っている時にのみ上段コイルの載置を行うことにより段積みの際の荷崩れを発生させないようにしたことを特徴とするコイル多段積み方法。
(もっと読む)
旋回クレーンの振れ止め制御方法及び制御装置
【課題】旋回角度θに起因する特異点を持たずに、旋回クレーンの連続的な振れ止め制御を可能にした旋回クレーンの振れ止め制御方法及び制御装置を提供する。
【解決手段】吊り荷運搬用のブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、前記制御入力を、ブームの目標旋回角速度と、ブームの目標旋回角度と、ブームの水平旋回半径と、旋回クレーンからフィードバックされたブームの実際の旋回角度,吊り荷の水平面内のx方向位置及びy方向位置,吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算する。
(もっと読む)
固定映像表示システム
【課題】吊荷と干渉物の位置関係を明確にした画像を生成することができる固定映像生成システムを提供することを目的としている。
【解決手段】本発明の固定映像表示システム10は、吊荷下方に設置され前記吊荷下方の画像を撮像する撮像手段30と、前記吊荷下方の撮像画像に吊荷モデルと、前記吊荷モデル上に障害物の距離又は/及び位置情報を組み込んだ処理画像を生成する画像処理ユニット60と、前記処理画像をモニターに表示する表示手段70と、を備えたことを特徴としている。
(もっと読む)
積荷搬送機械における荷重サイクル自動検出システム、および方法、ならびに搬送機械
【課題】
荷重サイクル、および/または積荷吊り下げ手段の重量を高い信頼性で認識させる。
【解決手段】
積荷搬送機械の荷重サイクル自動検出システムは、少なくとも引き上げ力計測装置の出力信号に基づいて荷重変化を自動検出するための荷重変化検出と、少なくとも水平方向の積荷の位置を検出する積荷位置検出と、荷重サイクル自動検出のための荷重サイクル検出とを備え、上記荷重サイクル検出は、少なくとも荷重変化検出、および荷重位置検出の出力信号に基づいて行われるとともに、上記荷重サイクル検出は、正の荷重変化が認識されたときに、積荷の位置を積荷ピックアップポイントとして検出し、積荷が、あらかじめ決定された距離だけ積荷ピックアップポイントから水平に移動したかどうかの判定に基づいて、上記正の荷重変化を新たな荷重サイクルの開始として評価する。
(もっと読む)
コンテナ位置測定装置
【課題】天候や輸送用コンテナの色による影響を受けにくく、輸送用コンテナの位置データを安定して測定できる位置測定装置を提供すること。
【解決手段】複数のコンテナ上を移動するクレーン1のブレーキ信号を受信するトリガー手段81と、トリガー手段81でのブレーキ信号を元に、マイクロ波センサー31からの計測信号の受信時間を決定する計測時間範囲決定手段82と、受信時間に受信する計測信号の信号レベルを比較する信号レベル比較手段84と、信号レベル比較手段84での信号レベルの比較を元にコンテナ高さを算出するコンテナ高さ決定手段86と、コンテナ高さ決定手段86で決定したコンテナ高さを表示する表示手段90を備え、計測時間範囲決定手段82では、トリガー手段81でのブレーキ信号が入力された後の所定時間を受信時間とすることを特徴とする。
(もっと読む)
物体吊上装置
【課題】簡易な構成でコイルの位置を検出することが可能な物体吊上装置を提供する。
【解決手段】物体10〜13を吊り上げ移動する物体吊上装置1であって、前記物体10〜13の上方を所定の走行方向に向けて移動可能な走行台車4と、該走行台車4に支持され前記物体10〜13を吊り上げ保持する保持装置5と、前記走行台車4の走行位置を検出する走行位置検出装置15と、前記走行台車4に配置され前記物体10〜13を検出する物体検出装置N1〜N3と、前記走行位置検出装置15と前記物体検出装置N1〜N3との検出結果に基づいて前記走行台車4の走行方向における前記物体10〜13の位置を検出する物体検出手段6と、該物体検出手段6の検出結果に基づいて前記保持装置4による前記物体10〜13の吊り上げ位置を調整制御する調整制御手段7とを備えている
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
位置計測装置
【課題】撮像距離に影響されず、画像中の形状が変化することのないランドマークを用いるとともに、周囲の明るさの影響を受けにくい位置検出処理を行う位置計測装置を得る。
【解決手段】撮像距離によらず相似形に撮像される放射状模様を有し、位置を計測する計測対象物に離間して付設される複数のランドマーク9と、前記複数のランドマーク9を同一画像に撮像するように設置固定されたカメラ8と、前記カメラ8の撮像画像から前記複数のランドマーク9の位置を検出し、該画像中の複数のランドマーク9の位置を用いて前記計測対象物であるスプレッダ5の位置を演算によって求める画像処理部7とを備える。
(もっと読む)
スタッカクレーンの制振方法
【課題】製造コストの上昇を招くことなく、発生する昇降台の自由振動の振幅を小さくして、作業効率を向上させるスタッカクレーンの制振方法を提供する。
【解決手段】増速領域、等速領域、及び減速領域を備えた速度パターンで走行レール11上を往復走行可能な走行台車12と、これに立設された昇降マスト13と、搬送物13aを搭載し昇降マスト13に沿って昇降する昇降台14を有するスタッカクレーン10の制振方法であって、昇降台14及び搬送物13aの重量と昇降台14の高さ位置に基づいて、スタッカクレーン10の固有振動周期を予め求め、この2倍以上の整数倍の時間に増速領域及び減速領域の時間を設定し、増速領域及び減速領域の各加速度パターンを、左右対称の増加及び減少加速度と負の増加及び負の減少加速度として、搬送物13aを搭載した昇降台14の増速領域及び減速領域の終了後に発生する自由振動の振幅を小さくする。
(もっと読む)
物品搬送設備における学習装置及び学習方法
【課題】位置調整量を正確に学習できる物品搬送設備での学習装置及び学習方法の提供。
【解決手段】学習制御手段が、位置決め処理、第1撮像処理、及び、第1撮像処理にて撮像された撮像情報に基づいて、撮像基準位置と検出用マークとの水平方向での基準位置ずれ量を求めてその求めた基準位置ずれ量から位置調整量を求める第1ずれ量演算処理を実行し、且つ、第1ずれ量演算処理にて求めた基準位置ずれ量が設定許容範囲から外れている場合には、求めた移動調整量に基づいて第2学習用冶具を位置調整すべく位置調整手段を作動させる補正位置決め処理、第2撮像処理、及び、第2撮像処理にて撮像された撮像情報に基づいて、撮像基準位置と検出用マークとの水平方向での基準位置ずれ量を求めて、その求めた基準位置ずれ量と移動調整量とから位置調整量を求める第2ずれ量演算処理を実行する。
(もっと読む)
コイルの積み込み方法及び装置
【課題】設備コストの上昇をできるだけ抑制しながら異材の発生を確実に防止する、有人クレーンを用いるコイルのトレーラ荷台への積み込み方法を提供する。
【解決手段】コイル4の積み込み開始前にオペレーターの操作により有人クレーン2を移動して荷台3a上の第1の基準点B2の積み込み場平面座標系の座標を求めるとともに、演算装置により求めた第1の基準点の座標に基づいて積み込み場平面座標系及び荷台平面座標系それぞれの原点の距離、積み込み場平面座標系の座標軸に対する荷台平面座標系の座標軸の傾斜角度及び向きを求めるティーチング作業を行っておき、オペレーターの操作によってコイルをトレーラーの荷台に下ろして積み込んだ後、演算装置により荷台平面座標系における積み込み位置の座標を、コイルを積み込んだ際の積み込み場平面座標系の座標及びティーチング作業により求めた関係に基づいて求める。
(もっと読む)
スラブ重心測定装置および方法
スラブ重心測定装置および方法を開示する。本発明のスラブ重心測定装置は、メインシステム、重心測定システム、および無人クレーンを含んでなる。前記メインシステムは、車両に積載された複数のスラブそれぞれの寸法および/または重さに関する情報を提供する。前記重心測定システムは、移送されなければならず、積載されたスラブを撮影する撮影部と、前記撮影部を上下に移動させる駆動部と、前記撮影部を用いて得られた前記スラブそれぞれの位置および形状情報、および前記メインシステムから受信した前記スラブの寸法または重さ情報を用いて、1回に移送するスラブの全体重心および把持位置を計算する制御部とを含む。前記無人クレーンは、前記重心測定システムで算出された把持位置の情報に応じてスラブを把持および移送する。  (もっと読む)
(もっと読む)
三次元空間搬送装置及び三次元空間搬送方法
【課題】少ない操作ボタンでオペレータに東西南北上下の6方向を意識させないで搬送装置を操作することができる三次元搬送装置を提供する。
【解決手段】本発明は、搬送対象物を保持して三次元空間において搬送する保持搬送部を有する装置本体部を備え、操作部からの命令に基づいて保持搬送部を三次元空間内において移動させる三次元空間搬送装置である。装置本体部に、保持搬送部をそれぞれ独立してX、Y、Z軸方向へ移動させるための三つのモータ21〜23が設けられるとともに、操作ペンダント9に、操作部本体の位置情報及び傾斜情報を検出するための3軸式の電子コンパスセンサー回路11と、装置本体部の三つのモータ21〜23を動作させるための少なくとも一つの操作スイッチとが設けられ、電子コンパスセンサー回路11にて検出された情報に基づいて三つのモータ21〜23を動作させるように構成されている。
(もっと読む)
1 - 20 / 32
[ Back to top ]