
Fターム[3F204DB05]の内容
クレーンの細部(制御、安全) (2,955) | 位置の検出(表示)対象 (174) | クレーンと被搬送物の相対位置 (84)
Fターム[3F204DB05]の下位に属するFターム
高さ方向 (40)
水平方向 (24)
水平面内での回転偏差 (4)
Fターム[3F204DB05]に分類される特許
1 - 16 / 16
クレーンフックを利用したデータ収集システム及びデータ収集方法
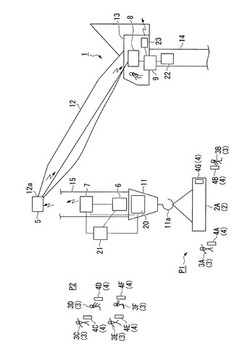
【課題】揚重作業に基づく精度の高い検出データをリアルタイムで確認することができ、データ収集にかかる手間とコストを低減することができる。
【解決手段】資材2や作業者3の被検出体に取り付けられるとともに、資材2や作業者3のそれぞれを特定する識別情報が組み込まれた電子タグ4と、クレーンジブ12の先端12aに設けられ、電子タグ4の識別情報を無線で送受信可能とされる通信アンテナ5と、フックブロック11に設けられ、電子タグ4の識別情報を検出可能なタグリーダ6と、フックブロック11に設けられ、タグリーダ6で検出した識別情報を通信アンテナ5に向けて無線により送信する送信部7と、クレーン1の操作室13に設けられ、通信アンテナ5より送信された電子タグ4の識別情報を受信する受信部8と、受信部8で受信した検出データを蓄積するデータ格納部9とを備えたデータ収集システムを提供する。
(もっと読む)
在荷認識装置

【課題】夜間など周囲が暗い状況においてもターゲットの誤認識を低下させ、パレット上に荷が載置されているか否かを高精度に認識することができる在荷認識装置を提供する。
【解決手段】荷を吊上げ搬送する吊上げ搬送手段3に搭載された撮像手段5と、荷を載置可能な複数のパレット1と、パレットに設けられており、荷を載置すると隠れて撮像手段による上方からの撮像が不可能となる被撮像部2と、撮像手段から入力した所定のパレットの撮像信号に基づいて被撮像部2の有無を確認し、所定のパレットへの荷の在荷を認識する認識部6とを備えた在荷認識装置である。被撮像部2は、明色からなる所定形状のターゲット2aと、このターゲット2aの周囲を囲んで設けられている暗色のターゲット周囲部2bとで構成されている。
(もっと読む)
クレーンの制御装置
【課題】負荷検出器の誤差の影響を受けにくく、より確実に荷振れを抑制できるクレーンの制御装置を提供する。
【解決手段】起伏自在のブームと、前記ブームの先端からワイヤによって吊り下げられるフックと、を備えるクレーンの制御装置2である。
そして、このクレーンの制御装置2は、吊荷を地切りする際に、ワイヤを巻上げてブームの撓みを増加させ、撓みの増加に基づくブーム先端の位置ずれを打ち消すためのブームの必要起仰量をブーム先端の姿勢のみに基づいて演算し、必要起仰量だけブームを起仰する移動制御手段20を備える。
(もっと読む)
クレーンの操作装置及びクレーン
【課題】簡単に操作モードを切換えることができるクレーンの操作装置を提供する。
【解決手段】作業機を駆動させる複数の駆動手段31,32,33,34を有するクレーン1に装備されて、操作量に応じて駆動手段31,32,33,34を動作させる操作手段2を備えるクレーンの操作装置Sである。
そして、操作手段2が操作されると、第1の駆動手段33又は第2の駆動手段31のいずれか一方に操作量に応じた速度で単独操作をさせた後に一定速度で単独動作をさせつつ、第1の駆動手段33又は第2の駆動手段31のいずれか他方に操作量に応じた速度で単独動作をさせる連動操作を行う連動操作制御手段50を備えている。
(もっと読む)
画像生成システム
【課題】フックの周辺を鉛直斜め上方から見下ろしながらクレーンを操作する操作者に対して有益な画像情報を提示できる画像生成システムを提供すること。
【解決手段】画像生成システムは、天井クレーンに取り付けられて隣の天井クレーンを撮像するカメラであり、天井クレーンの走行方向に平行に延びる光軸を有するカメラと、その光軸に平行な方向に天井クレーンと共に移動するマークに含まれる対象点のその光軸に垂直な平面におけるその光軸までの固定距離と、天井クレーンから天井クレーンまでのクレーン間距離が所定値となるときにカメラが撮像する画像におけるその固定距離の画像上の大きさとに基づいて、カメラが撮像した画像上に複数のクレーン間距離を示す目盛りを描画する目盛り描画手段とを備える。
(もっと読む)
操作指示装置及び作業車
【課題】コストを抑えつつ操作性の良好な操作指示装置を提供する。
【解決手段】作業機の操縦者に対して操作内容を指示する操作指示装置2である。
そして、この操作指示装置2は、油圧によって駆動される作業機12,14,18と、作業機12,14,18へ供給される供給油量Qsを人為操作で増減する供給手段4と、作業機12,14,18へ供給される供給油量Qsと作業機12,14,18を駆動するために使われる駆動油量Qdとの大小を判定する判定手段7と、判定手段7の判定に基づいて操縦者に対して省エネ操作を指示する指示手段8と、を備えている。
(もっと読む)
コイル吊り上げ方法及びリフター
【課題】運転室でクレーン操作を行う作業者が、自ら目視によりクレーン装置を操作してコイルを吊り上げて移動させる際に、コイルと作業者との距離や、作業者の技能等に関わりなく、短時間で確実にコイルを垂直上方向に吊り上げる技術を提供すること。
【解決手段】コイル支持用アーム部を備えたリフターを、作業者の目視により操作してコイルを吊り上げるコイル吊り上げ方法であって、リフターの所定位置に固定されたレーザー光線発生手段から照射されるレーザー光線を、作業者の目視によりコイルの所定位置に導くことにより、コイルとリフターを位置合わせした上でコイル支持用アーム部でコイルを把持する。
(もっと読む)
搬送方法およびこの方法を実施する搬送手段の制御システム
【課題】天井走行クレーンによるパワーアシストを得て、作業者が望む方向へ望む速度で搬送物を移動させる搬送方法において、従来まで制御不可能であった搬送物の姿勢を制御することが可能な搬送物の搬送方法を提供する。
【解決手段】上端がワイヤロープの下端に連結されかつ張力検出手段を付設したロープと、上端がワイヤロープの下端に連結されかつ張力検出手段を付設した電動シリンダロープとによって構成された懸吊手段の下端間に、搬送物を装架させて接続して搬送物を吊り下げ、その後、搬送物に作用する操作力と搬送物の重量による負荷を張力検出手段によってそれぞれ検出し、これらの張力検出手段による検出値からヤコビ行列(JT )−1を用いて、 電動シリンダを収縮作動させるとともにサーボモータを同期化制御して搬送物の姿勢を制御することを特徴とする。
(もっと読む)
コイルリフターの旋回装置
【課題】コイルを吊り上げた状態でコイルリフターを旋回させる旋回装置において、コイルリフターを90度旋回/180度旋回させたときに自動停止する手段を付加して作業効率および安全性を高める。
【解決手段】コイルリフターの旋回装置が、吊具の固定歯車14に90度間隔で設けられるドッグ39a〜39dと、本体20に設けられるリミットスイッチ38とを有し、基準位置にあるときにドッグ39dがリミットスイッチと整列し、該基準位置から本体が吊部に対して90度旋回したときにドッグ39dに隣接するドッグ39a,39cがリミットスイッチと整列し、該基準位置から180度旋回したときにドッグ39dに対向するドッグ39bがリミットスイッチと整列する。これら90度旋回位置または180度旋回位置を検出すると、制御手段がコイルリフターを90度旋回位置または180度旋回位置で自動停止させる。
(もっと読む)
時間報知方法および同装置
【課題】加工ライン等へのワークの延着によるトラブルの発生を未然に防止する。
【解決手段】管理装置20は、鋼板コイルの保管庫1と、この保管庫1内のコイルWを搬送する天井クレーン12とを備えた保管設備に適用される。管理装置20は、コイルWの在庫数を記憶する在庫情報記憶手段と、コイルヤード10に載置可能なコイルWの最大数等を記憶する各種データ記憶手段と、コイルWの搬出要求に応じ、各記憶手段等に記憶されている情報に基づいて搬出対象コイルWをコイルヤードから搬送台車に移載する際の所要時間の期待値を演算する移載時間演算手段とを備えた管理装置本体、および移載時間演算手段で求められた期待値を、前記所要時間の予測値として表示する表示装置を有する。
(もっと読む)
時間報知方法および同装置
【課題】加工ライン等へのワークの延着によるトラブルの発生を未然に防止する。
【解決手段】管理装置20は、スラブの保管庫1と、この保管庫1内のスラブWを搬送する天井クレーン12とを備えた保管設備に適用される。管理装置20は、スラブWの在庫数を記憶する在庫情報記憶手段と、スラブヤード10に形成可能な積層体の最大数、基準時間等を記憶する各種データ記憶手段と、スラブWの搬出要求に応じ、各記憶手段等に記憶されている情報に基づいて対象スラブWをスラブヤードから搬送台車に移載する際の所要時間の期待値を演算する移載時間演算手段とを備えた管理装置本体、および移載時間演算手段で求められた期待値を、前記所要時間の予測値として表示する表示装置を有する。
(もっと読む)
スプレッダの衝突防止装置
【課題】2台のスプレッダを操作して、コンテナヤードに混在する40ft型コンテナと20ft型コンテナを同時に取り扱うという作業において、スプレッダによるコンテナの誤吊り上げや衝突事故を防止するとともに、作業の効率化を図る。
【解決手段】スプレッダの本体フレーム10の底面に、横行方向の中心軸上に所定の間隔をおいて第1超音波センサー群20と、走行方向の中心軸上に所定の間隔をおいて第2の超音波センサー群21とを配置して、第1超音波センサー群20の検出信号に応じてスプレッダの巻き下げ速度を制御し、第2超音波センサー群21の検出信号に応じてコンテナの種類を識別する。
(もっと読む)
作業機の遠隔操作装置
【課題】従来の遠隔操作装置の利点を維持しながら、必要に応じて、制御対象部位5の移動方向を一定に維持(固定)できる新規な遠隔操作装置を提供する。
【解決手段】携帯操作部6に移動方向固定スイッチ8を取り付け、この移動方向固定スイッチ8を操作することにより、携帯操作部6からコントローラ7に入力される前記移動方向指示信号が示す基準絶対方位に対する偏角を、移動方向固定スイッチ8操作直前のものに固定するよう構成した。
(もっと読む)
作業車の遠隔操作装置
【課題】制御対象部位の到達目標絶対座標位置の入力を簡単且つ容易に行うことのできる作業機の遠隔操作装置を提供する。
【解決手段】携帯操作部6に、操作部絶対座標位置を検出する操作部絶対座標位置検出手段11を取り付けると共に、携帯操作部6の目標位置指示手段7を、携帯操作部6を到達目標位置方向に指向させることで操作部絶対座標位置を基点とする到達目標位置の方位を指示する方位指示手段12と、携帯操作部6の現在位置から到達目標位置までの離隔距離を指示する距離指示手段13とで構成し、到達目標絶対座標位置を、操作部絶対座標位置、方位指示手段12からの方位、および、距離指示手段13からの離隔距離から算出して求めるようにした。
(もっと読む)
コンテナ搬送車の遠隔誘導装置及びシステム並びに方法
【課題】 荷役を行うヤードクレーンが無人の場合であっても、そのヤードクレーンに対してシャシを正しい位置に停止させることのできるコンテナ搬送車の遠隔誘導装置及びシステム並びに方法を提供することを目的とする。
【解決手段】 コンテナヤード内で荷役を行うヤードクレーンの下方に設けられた目標停止位置に、コンテナ搬送車を遠隔から誘導するコンテナ搬送車の遠隔誘導装置であって、ヤードクレーンに取り付けられた移動通信装置からコンテナ搬送車の映像信号を画像として表示するモニタ31乃至33と、シャシに対する誘導指令を入力するためのマイク35と、誘導指令をヤードクレーン又はシャシに取り付けられた移動通信装置へ送信する送信装置とを備えるコンテナ搬送車の遠隔誘導装置を提供する。
(もっと読む)
コンテナクレーンにおけるシャシ位置検出装置
【課題】 コンテナヤードに遠隔無人運転システムを導入する場合に、コンテナをシャシに固定するための固定手段が解除されていないときに、ヤード用クレーンでコンテナを吊り上げると、シャシがコンテナと共に吊り上げられた状況を検出して、迅速に対処できるようにするシャシ位置検出装置を提供する。
【解決手段】 ヤード用橋形クレーン4の脚4bの内側面に下方を指向してレーザー光線L1を発して積み卸しのコンテナ3の側面に入射させて、該コンテナ3の側面までを測距する。コンテナ3がスプレッダ7で保持されてトロリ4dにより吊り上げられた場合、シャシ5から離隔した状態であれば、前記レーザー光線L1はシャシ5の載置面5aまで達して測定距離が大きくなり、離隔してない状態では測定距離がほとんど変わらないから、この距離の変化によってシャシ5の有無を検出する。
(もっと読む)
1 - 16 / 16
[ Back to top ]