
Fターム[3F204DB06]の内容
クレーンの細部(制御、安全) (2,955) | 位置の検出(表示)対象 (174) | クレーンと被搬送物の相対位置 (84) | 高さ方向 (40)
Fターム[3F204DB06]の下位に属するFターム
被搬送物上面への着床検出 (10)
Fターム[3F204DB06]に分類される特許
1 - 20 / 30
吊荷周辺の物体の高さ情報通知システム
クレーンの制御方法
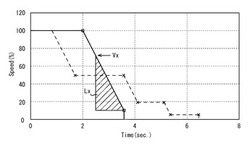
【課題】スプレッダを巻下ろしてコンテナに接近させる際に、スプレッダとコンテナの衝突を防止し、且つ、短時間でスプレッダとコンテナの接触を実現したクレーンの制御方法を提供する。
【解決手段】主巻ワイヤロープに吊られたスプレッダと、スプレッダと海上用輸送コンテナの間の距離を計測する距離計測センサを有するクレーン1の制御方法において、センサでスプレッダとコンテナ間の距離Lxを計測する距離計測ステップと、距離Lx及びスプレッダのブレーキ時の加速度から上限速度Vxを算出する算出ステップと、スプレッダ7の移動速度を上限速度Vxに制御する減速ステップを有する。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体

【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体
【課題】吊荷の水中高度を精度良く維持しつつ上下動を抑制することが可能な洋上荷役システムを提供する。
【解決手段】洋上浮遊体に取付けられるウィンチ等の荷役機構W1と、荷役機構W1より引き出され吊荷52を懸架するワイヤロープ511と、ワイヤロープ511の引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1を制御する制御手段6とを具備するものであって、制御手段6が、吊荷52に設けられる海底31との距離を測る水中高度検出部651と、吊荷52の水中高度Hを制御するためのワイヤロープ511の引き出し量補正値を水中高度検出部651からの検出値に基づいて出力する高度補正指令部88とを備え、高度補正指令部88からの出力値をフィードバックして荷役機構W1の制御を行うように構成した。
(もっと読む)
ロープトロリ式アンローダのバケット振れ止め装置
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、張力検出手段からの第1巻上ロープ19及び第2巻上ロープの張力検出値とトロリの横行速度検出手段からのトロリ横行速度とグラブバケットの吊り長さ検出手段からの吊り長さとを入力し、トロリの横行起動時には横行方向前側の巻上ロープの張力が横行方向後側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御し、トロリの横行停止時には横行方向後側の巻上ロープの張力が横行方向前側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御してグラブバケットをトロリの直下に位置させる制御器を備える。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
固定式ケーブルクレーンの運転方法
【課題】2基のケーブルクレーンでの合吊り運転を確実に行うことができ、広い範囲での吊荷の荷降ろしが可能となる固定式ケーブルクレーンの運転方法を提供すること。
【解決手段】1号固定式ケーブルクレーン1および2号固定式ケーブルクレーン3を並列に設置する。そして、ウェブ59に吊り穴61を有するI型鋼57を、1号固定式ケーブルクレーン1の1号吊具17と2号固定式ケーブルクレーン3の2号吊具19とに架け渡して吊り下げ、任意の吊り穴61に第3の吊具65を設置して吊荷67を吊る。さらに、1号位置検出器35および2号位置検出器41により、1号吊具17および2号吊具19の位置信号を検出し、これらの位置信号と1号固定式ケーブルクレーン1の動作信号とに基づいて、1号吊具17と2号吊具19とが同期して移動するように2号固定式ケーブルクレーン3に動作信号を出力する。
(もっと読む)
クレーン装置の制御方法
【課題】いわゆるダブルフック型の天井走行クレーン装置を用いて吊荷を傾斜させたときの落下事故を防止することが可能な制御方法を提供する。
【解決手段】本発明は、クレーン本体1と、クレーン本体に載置された一対の台車2A,2Bと、各台車にそれぞれ取り付けられた一対のフック3A,3Bとを備え、各フックが互いに連動して昇降可能な第1の状態と、前記各フックが独立して昇降可能な第2の状態とを切り替え可能とされたクレーン装置100を制御する方法である。本発明は、一対のフック間距離と各フックの高さとを検出するステップと、検出した一対のフック間距離及び各フックの高さに基づいて、一対のフックで吊持する吊荷の傾斜角度を算出するステップと、算出した吊荷の傾斜角度が、予め設定した吊荷の安定限界角度に到達した場合には、各フックの昇降動作を強制的に停止させるステップとを含む。
(もっと読む)
旋回素子を備える作業装置の高さを決定するための方法および制御装置
本発明は、旋回素子を備える作業装置の可変の作業高さを決定するための方法であって、作業高さを得るために作業装置(1)の旋回素子(2)による線形運動が行われる方法に関する。粗野な環境条件においても作業高さの決定時に正確な結果を得るために、旋回素子(2)が進んだ高低差(Δh)から得られる差圧(Δp)を決定することにより作業高さの検出を行う。 (もっと読む)
コンテナ位置測定装置
【課題】天候や輸送用コンテナの色による影響を受けにくく、輸送用コンテナの位置データを安定して測定できる位置測定装置を提供すること。
【解決手段】複数のコンテナ上を移動するクレーン1のブレーキ信号を受信するトリガー手段81と、トリガー手段81でのブレーキ信号を元に、マイクロ波センサー31からの計測信号の受信時間を決定する計測時間範囲決定手段82と、受信時間に受信する計測信号の信号レベルを比較する信号レベル比較手段84と、信号レベル比較手段84での信号レベルの比較を元にコンテナ高さを算出するコンテナ高さ決定手段86と、コンテナ高さ決定手段86で決定したコンテナ高さを表示する表示手段90を備え、計測時間範囲決定手段82では、トリガー手段81でのブレーキ信号が入力された後の所定時間を受信時間とすることを特徴とする。
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
ホイスト
【課題】巻上機と荷物の鉛直位置を目視判断に頼ることなく、自動的に巻上機を鉛直位置に移動させることで荷揺れをなくし、また、荷揺れをなくすことで安全性の向上につながり、さらに作業効率の向上が達成される装置を提供する。
【解決手段】ワイヤーロープが掛けわたされた重量物の巻上動作及び巻下動作を行うための巻上誘導電動機と、横行動作を行なう為の横行用誘導電動機と、が備えられた本体部を備えるとともに、走行装置により前記本体部が前記本体部横行方向と異なる方向に移動させられるホイストにおいて、前記重量物と前記本体部の位置関係を判断する重量物位置検出装置を備え、前記重量物位置検出装置の検出結果に応じて、前記重量物が前記本体部の鉛直方向に位置するように少なくとも前記横行用誘導電動機又は前記走行装置のいずれか一方を駆動させる。
(もっと読む)
作業機の操作装置
【課題】十字型のジョイスティックを用いた操作装置において、容易且つ的確な複合操作を可能とし、安全性及び信頼性の高い作業を実現し得る作業機の操作装置を提供する。
【解決手段】十字型のジョイスティックを備えた作業機の操作装置において、上記ジョイスティックの可動範囲内に、該ジョイスティックの操作を固定できる操作固定位置を設定し、該操作固定位置への上記ジョイスティックの操作固定状態において作業機に対する特定の操作が実行されるように構成する。係る構成によれば、上記操作固定位置に上記ジョイスティックを固定することで、上記特定の操作を的確に且つ安定的に実行することができ、作業の安全性及び信頼性が向上する。
(もっと読む)
クレーン及びクレーンによるコンテナの吊り下ろし方法
【課題】載置面に対して衝撃を抑えつつ効率的にコンテナを吊り下ろすことが可能な、タイヤ式門型クレーン及びこのタイヤ式門型クレーンによるコンテナの吊り下ろし方法を提供する。
【解決手段】クレーン本体と、該クレーン本体に設けられて載置面へのコンテナの吊り下ろし、吊り上げを行う吊下機構と、前記載置面への前記コンテナの吊り下ろし速度、及び前記載置面から前記コンテナの下面までの吊り下ろし距離を監視し、前記吊り下ろし速度と、予め設定された減速度とに基づき算出されるコンテナ停止距離が、前記吊り下ろし距離よりも大きい場合には、前記吊下機構による吊り下ろしを強制減速させる制御手段と、を備える。
(もっと読む)
クレーンの移動制御装置及び移動式クレーン
【課題】ブームが移動限界状態になる場合にフックの水平移動を継続してもウインチの衝撃を抑制できるクレーンの移動制御装置を提供する。
【解決手段】起伏移動自在かつ伸縮移動自在に形成されるブーム13と、ウインチ17に連繋されてブーム13のブーム先端部134から吊下げられるフック16と、を備えるクレーンに設置されて、ブーム先端部134及びフック16を水平移動させることができるクレーンの移動制御装置2である。
そして、ブーム先端部134及びフック16を水平移動させていて、ブーム16が所定の姿勢位置LLMに達した時点又はそれより前に、ブーム先端部134の水平移動を解除し、ブーム伸縮移動操作又はブーム起伏移動操作のいずれか一方の操作とウインチ操作とを含む2つの操作でフック水平移動を継続させるとともに、ウインチ17の回転が急変することで生じる衝撃を衝撃抑制手段70によって抑制する
(もっと読む)
搬送台車及び光測距装置
【課題】部品コストの上昇を回避しながらも、僅かな大きさの障害物であっても精度よく検出でき、事故の発生を未然に回避できる搬送台車及び光測距装置を提供する。
【解決手段】上部空間に設置された走行レールに沿って自走し、搬送対象物を掴むチャック機構を備えた昇降体を所定の昇降経路に沿って昇降させる昇降機構が組み込まれた搬送台車であって、前記昇降経路上の障害物の有無を検出する光測距装置が前記昇降体に取り付けられるとともに、前記光測距装置による障害物の探索距離が前記光測距装置と前記搬送対象物の載置面との距離よりも短い距離に設定されている。
(もっと読む)
天井走行車
【課題】天井走行車の傾斜を補正し、安定して物品の移載ができるようにする。
【解決手段】天井走行車の昇降駆動部の裏面に左右一対の光センサ38,39からなるレーザセンサを設け、昇降台に設けた反射率が所定ピッチで変化する反射板28からの反射光を受光する。2つの光センサの信号を組み合わせて、昇降駆動部と昇降台間の傾斜を反射板28の1/2ピッチで検出し、傾斜補正部24により昇降駆動部の傾斜を補正する。
(もっと読む)
位置ずれ量算出方法およびクレーン並びに搬送台車
【課題】クレーンの吊具と搬送台車との相対的な位置関係を把握し、安定した信頼性の高い荷役作業を行うこと。
【解決手段】本体2からワイヤ14によって吊り下げられた吊具15によりコンテナ50を把持して移動させることにより荷役作業を行うクレーン1と、クレーン1との間でコンテナ50の受け渡しを行う搬送台車との相対的な位置ずれ量を算出する位置ずれ量算出方法であって、搬送台車の特定の位置に設けられた目印をクレーン1の吊具15に取り付けられた撮像装置により撮像し、撮像装置により取得された撮影画像上の目印の位置と吊具15における撮像装置の取り付け位置との関係に基づいて、搬送台車と吊具15との相対的な位置ずれ量を算出する。
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
1 - 20 / 30
[ Back to top ]