
Fターム[3F333FD00]の内容
フォークリフトと高所作業車 (11,384) | 検知量 (822)
Fターム[3F333FD00]の下位に属するFターム
Fターム[3F333FD00]に分類される特許
1 - 5 / 5
作業車の安全装置及び作業車
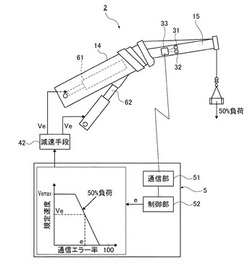
【課題】通信不良の前兆を捉えて作業機の動作速度を減速できる作業車の安全装置を提供する。
【解決手段】駆動手段61,62によって駆動される作業機14,15と、作業機14,15の状態を計測する計測手段31,32と、計測された状態情報を伝送する伝送手段33と、伝送された状態情報を受信するとともに駆動手段61,62を制御する制御手段5と、を備える作業車の安全装置2である。
そして、制御手段5は、伝送手段33との間の通信エラー率に応じて駆動手段61,62の速度を減少させて作業機14,15を駆動する。
(もっと読む)
産業車両の走行制御装置

【課題】 過剰な加速制限を行うこと無く、バッテリ放電電力制限値を守ることができる産業車両の走行制御装置を提供する。
【解決手段】 走行制御装置は、アクセル開度に基づいて走行モータ回転数指令値を求める回転数指令値算出部32と、走行モータ実回転数と走行モータ回転数指令値とに基づいて加速度指令基準値を求める加速度指令基準値算出部33と、走行モータ実回転数と発電モータ電力とバッテリ放電電力制限値とを含む情報に基づいて、バッテリ放電電力制限値を超過しない範囲内に加速度指令値を制限するための加速度制限値を求める加速度制限値算出部35と、加速度指令基準値及び加速度制限値のうち値の小さいほうを加速度指令値として選択し、その加速度指令値を走行モータ駆動制御部27に送出する加速度指令値決定部36とを有している。
(もっと読む)
フォークリフト
【課題】簡易な構成により安定な荷役動作と回生電力の高効率な回収を可能とする。
【解決手段】回転運動を直線運動に変換する直動型のアクチュエータを荷役駆動装置の複数のフォーク部分にそれぞれ備えるフォークリフトにおいて、前記複数のフォーク部分に備える複数のアクチュエータをそれぞれ駆動する誘導モータ、該誘導モータを共通に駆動するインバータおよび該インバータを制御するコントローラを備え、 該コントローラは、前記複数の誘導モータの回転速度をそれぞれ検出する検出器の検出値のうち最も低い検出値を用いてすべり周波数を演算する。
(もっと読む)
荷役物運搬機の吊り具
【課題】治具に荷役物を嵌入する時に、こじないでスムースに嵌入する吊り具を提供する事を目的としている。
【解決手段】支持体にシャフトとスライド駆動装置が固着され、シャフト先端に保持機構を有し、スライド駆動装置に押動部を有し、押動部はクランプ機構を有し、クランプ機構で荷役物をクランプし、押動部はシャフトに沿ってスライドして荷役物を押動し、シャフトに歪センサが配設され、歪センサでシャフトの撓み方向と撓み量を検出し、歪センサの信号を基に荷役物運搬機の昇降駆動装置の出力を補正してシャフトを任意の角度に保持する制御部を有し、荷役物を治具に嵌入させる。
(もっと読む)
輪止め安全装置
【課題】 輪止めにより車輪が固定されていない状態で作業を行うことを防止する輪止め安全装置を提供する。
【解決手段】 前後輪3a,3bを駆動して走行する高所作業車1の車体2に設けられ、この高所作業車1の駐車時に後輪3bを固定するための輪止め10を格納する輪止め格納部11と、輪止め10が輪止め格納部11に格納されているか否かを検出する左右格納状態検出部22,23と、アウトリガジャッキ8を操作するジャッキ操作装置9と、ジャッキ操作装置9によるアウトリガジャッキ8の操作を規制するジャッキ制御部21とからなる輪止め安全装置20において、ジャッキ制御部21が、左右格納状態検出部22,23により輪止め10が輪止め格納部11に格納されていると判断されたときにジャッキ操作装置9によるアウトリガジャッキ8の操作を規制するように構成する。
(もっと読む)
1 - 5 / 5
[ Back to top ]