
Fターム[3F333FD07]の内容
フォークリフトと高所作業車 (11,384) | 検知量 (822) | 角度 (202)
Fターム[3F333FD07]の下位に属するFターム
Fターム[3F333FD07]に分類される特許
1 - 20 / 70
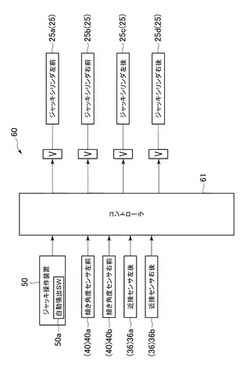
作業用車両のジャッキ作動制御装置
【課題】ジャッキの下に敷木をずれがなく短時間で設置でき、また敷木が設置される地面の確認や障害物の確認ができる作業用車両のジャッキ作動制御装置を提供する。
【解決手段】高所作業車1のジャッキ作動制御装置60は、車体に設けられ車体の少なくとも下方に張り出して車体を支持するアウトリガジャッキと、このジャッキの伸縮作動を操作するジャッキ操作装置50と、ジャッキ操作装置50の操作に応じてアウトリガジャッキのジャッキシリンダ25の伸縮作動を制御するコントローラ61とを備え、コントローラ61は、ジャッキ操作装置50の自動張出SW50aによってアウトリガジャッキを自動張出させる操作がされると、各ジャッキシリンダ25が接地する手前の位置でジャッキシリンダ25の伸長作動を停止させ、その後の自動張出SW50aの操作によって各ジャッキシリンダ25を伸長させる。
(もっと読む)
車両用操舵装置及び荷役車両

【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
データレコーダ、運行管理装置
【課題】フォークリフトの移動の停止を正確に判定する。
【解決手段】フォークリフト20の移動速度と、その移動方向が前進と後退のいずれであるかを表す識別信号とをデータレコーダ10で取得し、この移動速度と移動方向との組み合わせが所定の条件を満たすときに、フォークリフト20が備えるセンサの検出結果に関わらず、フォークリフト20の移動が停止したと判定して、この判定結果を含む運行データを記録媒体60に記録し、この記録データを運行管理装置70で解析する。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム
【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
把持装置
【課題】ワークを変形させず把持できる把持装置の提供にある。
【解決手段】把持装置は、一対のアーム21に一対の把持プレートをリンクバーを介して支持している。把持プレートには、ワークWに当接する把持面に感圧センサ24を設ける。また、一対のアーム21のアーム間距離を変更させるモータ15には、モータ15の回転軸の回転量を検出するエンコーダを設ける。ワークWを把持するときは、一対の把持プレートがワークWに当接したかを感圧センサ24にて検出する。一対の把持プレートがワークWに当接したら、把持プレートがリンクバーにより上方の最大揺動位置まで揺動するようモータ15を所定量駆動する。把持プレートが最大揺動位置に達したときに、モータ15の駆動を停止して把持操作を完了する。
(もっと読む)
高所作業用車両
【課題】 ジャッキ伸長量を必要以上に大きくすることなく、車体全ての方向の大きな傾斜に対してターンテーブル上面を水平に傾斜矯正できる梯子或いは塔を搭載した高所作業用車両を提供すること。
【解決手段】 エンジンを搭載しその回転駆動力により車輪を回転させて走行する作業用車両であって、梯子或いは塔を搭載し、梯子或いは塔を操作するための車体安定用のジャッキが設けられており、高所作業時の傾斜を矯正するための上下2つの旋回輪ベアリングを持ち、そのうちの上部旋回輪ベアリングを傾斜させてあり、旋回輪とジャッキにより車両設置場所の傾斜を矯正してターンテーブル上面を水平面にするように構成されている。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
荷役車両
【課題】コンテナ等の荷室の天井等に接触することなく、最大限の高さの荷を、傾斜路を介して荷室にスムーズに搬入、搬出できる荷役車両を提供する。
【解決手段】前部に荷を底部から支持するフォーク14L,14Rを有する自走式の車体12と、車体12に設けられてフォーク14L,14Rを昇降駆動する車体部リフト装置13と、フォーク14L,14Rの前端側で従動輪52を介してフォーク14L,14Rを昇降駆動するフォーク部リフト装置51とを備え、フォーク14L,14Rの前後方向の傾斜角度を検出する水平検出センサ72と、水平検出センサ72により検出された傾斜角度に基づいて車体部リフト装置13によりフォーク14L,14Rを昇降駆動し、フォーク14L,14Rの姿勢を水平に制御するコントローラ71を設けることで、搬入出可能な最大限の高さの荷をコンテナ等の荷室に傾斜した傾斜路を介して搬入、搬出する。
(もっと読む)
荷役車両
【課題】昇降支持体の厚みを薄くすることができ、かつ大重量の荷をリフト可能な大きい駆動力を得、さらに荷の荷重を分散できて床面の損傷を防止する。
【解決手段】フォーク部リフト装置51は、フォーク部リフトシリンダ59により出退駆動されてくさび面60tを有する駆動くさびブロック60と、幅方向の水平支軸54を介して上下方向に揺動自在な揺動レバー55の後端部に設けられて駆動くさびブロックの60によりくさび面60t,58tを介して押し上げられる受動くさびブロック58と、揺動レバー55の前端部に幅方向の車輪支持軸57を介して設けられて上下方向に揺動自在に支持された車輪支持フレーム57と、車輪支持フレーム57に前後方向に所定間隔をあけて配置された複数の遊転車輪52とを具備した。
(もっと読む)
ステアバイワイヤ式のステアリング装置
【課題】減速旋回中において、減速旋回中に車両に作用する遠心力が一定になるように操舵輪の操舵角の制御を行う。
【解決手段】ステアバイワイヤ式のステアリング装置は、ハンドル20の旋回角φを検出する旋回角検出センサ32と、操舵輪30の操舵角θを検出する操舵角センサ32と、操舵輪30を駆動する操舵駆動装置3と、操舵駆動装置3を制御する制御装置4とを備え、ハンドル20の旋回に応じて操舵輪30を操舵方向に駆動する。ステアリング装置は、車両の速度Vが旋回角φに応じて設定された制限速度より大きいときに、車両の速度Vを制限速度まで減速する減速手段を備える。そして、この減速手段により減速旋回しているときに、車両に作用する遠心力が一定となるように操舵角θをハンドル20の旋回角φに応じた所定角度まで大きくする。
(もっと読む)
車両用操舵装置
【課題】旋回性に優れ且つ車両姿勢が安定した車両用操舵装置を提供すること。
【解決手段】車両の幅方向Xに延びる第1の被動ラック9Aと第2の被動ラック9Bに、共通の駆動ピニオン10が噛み合う。トレッド幅変更アクチュエータ11が駆動ピニオン10を駆動すると、第1および第1の被動ラック9A,9Bが互いに反対方向に移動する。第1および第2の転舵輪3A,3Bをそれぞれ転舵する第1および第2の転舵アクチュエータ4A,4Bが、それぞれ、第1の被動ラック9Aおよび第2の被動ラック9Bと同行移動する。転舵角センサにて検出された転舵角等に応じて、トレッド幅変更アクチュエータ11を駆動制御し、トレッド幅WTを変更する。
(もっと読む)
フォークリフトのエンジン制御装置
【課題】無積載若しくは軽負荷(軽荷重負荷、軽走行負荷)の状態のときにアクセルペダルが一杯に踏込まれた場合に、燃料消費を低く抑えることができ、しかも一旦重量のある荷物が積載された場合には、最大上昇速度で荷物を上昇でき、最大の走行性能をもって加速不良なく走行できるようにして作業性を確保する。
【解決手段】トルク線図上で最大トルク値の大きさが異なる複数の最大トルク線を少なくとも2つ予め設定する。そして、アタッチメントに積載された荷物の重量を計測する。そして、計測された重量に対して、少なくとも2つの最大トルク線を選択するためのしきい値を定め、計測された重量がしきい値よりも小さい場合には、最大トルク値が小さい方の最大トルク線を選択するとともに、計測された重量がしきい値以上の場合には、最大トルク値が大きい方の最大トルク線を選択する。そして、選択された最大トルク線を用いてエンジンを制御する。
(もっと読む)
高所作業車
【課題】路面の傾斜によらず作業台の許容作業範囲を十分に確保することにより使い勝手を向上させた高所作業車を提供する。
【解決手段】旋回台20は、走行体10の進行方向に対して直交する面内において、旋回台20を揺動させるとともに左右側方へ旋回台20を移動させる揺動スライド機構40を介して走行体10上に設けられ、揺動スライド機構40は、旋回台支持部41と走行体10とに枢結されて、旋回台支持部41を揺動可能となるように接続する後部左側リンク部材42、後部右側リンク部材43と、後部左側リンク部材42および後部右側リンク部材43を、走行体10との枢結部分を中心として揺動させる揺動スライドシリンダ45とを有して構成される。
(もっと読む)
高所作業車
【課題】制御装置の負担を増加させずに、作業台の水平方向及び垂直方向の移動範囲を拡張し作業者の作業性を向上させることが可能な高所作業車を提供する。
【解決手段】走行体と、起伏動自在に取り付けられたブーム30と、ブーム30を起伏動させる起伏シリンダと、ブーム30の先端部に上下に揺動自在に取り付けられたアーム40と、ブーム30に対してアーム40を上下方向に揺動させるアーム揺動シリンダと、アーム40の先端部に上下に揺動自在に取り付けられた作業台50と、アーム40に対して作業台50を上下方向に揺動させる作業台揺動シリンダと、ブーム30の起伏動作に応じて、アーム揺動シリンダ及び作業台揺動シリンダのいずれか一方を他方よりも優先させて作動させて作業台50を水平状態に維持する制御を行うレベリング制御手段とを備えたことを特徴とする。
(もっと読む)
産業車両のウイングバケット回動機構
【課題】ウイングバケットの開き量を運転席から正確に目視できるようにする。
【解決手段】スキッドステアローダのパレット30の左右両側には、回動可能な一対のウイングバケット31、32が設けられている。ウイングバケット31、32の先端部は、シリンダ4の駆動により、パレット30の左右両側部に接近配置される閉塞位置と、パレット30の左右両側方に離れて配置される開放位置とをとり得る。シリンダ4のピストンロッド先端には、ピストンロッド先端から上方に延びる軸状の指示部材42が取り付けられており、シリンダ4を収容するカバー8の上面80には、指示部材42の先端部が上方に挿通しかつピストンロッド41の移動方向に沿って延びるスリット80aが形成されている。カバー上面80のスリット開口部には、指示部材42のスリット内の位置を示す目盛版81が貼着されている。
(もっと読む)
横転警告装置
【課題】フォークリフトの横転リスクを低減でき、かつ安価な横転警告装置を提供する。
【解決手段】車両の前部に昇降可能なフォークを備えたフォークリフトの横転警告装置20であって、ハブに取り付けられ、このハブの歪みを検出可能な歪みゲージ21と、歪みゲージ21の検出結果に基づいて、車両における横転の可能性を判定する演算部23と、演算部23による判定結果に基づいて、運転者に警告を行う警告ランプ17とを備えた。
(もっと読む)
電気式フォークリフト
【課題】 電気式フォークリフトに適用される荷重表示装置に於て、フルフリーマストを装備したものであっても、容易に荷重を表示できる様にする。
【解決手段】 走行用モータ2、インバータ3、走行操作検出器4、フォーク用リフトシリンダ5、マスト用リフトシリンダ6、マスト揚高検出器7、圧力センサ8、制御装置9、速度計10、荷重計11とで構成し、とりわけ、フォーク用リフトシリンダ6とマスト用リフトシリンダ5との切換え作動時のマスト揚高を検出するマスト揚高検出器7と、両リフトシリンダ5,6への作動油の圧力を検出する圧力センサ8と、マスト揚高検出器7からのマスト揚高と圧力センサ8からの圧力と両リフトシリンダ5,6のシリンダ径とに基づいてフォーク16上の荷重を演算する制御装置9と、制御装置9からの荷重を表示する荷重計11とを備えている。
(もっと読む)
作業台のレベリング装置及び高所作業車
【課題】エンジンを停止した状態でも作業台の姿勢をすぐに修正できる作業台のレベリング装置を提供する。
【解決手段】車体10に起伏可能に取付けられるブーム3と、ブーム3の先端に起伏可能に取付けられる作業台4と、作業台4を起伏させるレベリングシリンダ5と、を有する高所作業車1の作業台のレベリング装置Sである。
そして、レベリングシリンダ5をエンジン61によって駆動させる常用油圧ポンプ62,63と、エンジン61が停止している場合にレベリングシリンダ5のみを駆動させる電動の非常用油圧ポンプ65と、を備えている。
(もっと読む)
軌陸作業車
【課題】軌道走行時における頻繁な走行規制作動をなくすことで、操作性および作業効率を向上させた軌陸作業車を提供する。
【解決手段】軌陸作業車1は、軌道Rを走行可能な車体と、昇降移動可能な作業台と、作業台の移動位置に応じて走行作動を規制する走行規制装置とを有し、走行規制装置が、作業台の移動位置を検出する位置検出部と、走行状態において軌道Rの周囲に設けられた架線9に干渉しないような作業台の許容移動範囲2および許容移動範囲2を外方に拡げるようにして設定された拡大許容移動範囲3を備えた制御部とを有して構成され、制御部は、停車状態において位置検出部により検出された作業台の移動位置が許容移動範囲2外に位置するときに発進を規制し、走行状態において拡大許容移動範囲3外に作業台が位置するときに走行を規制する。
(もっと読む)
高所作業車の操作装置
【課題】 全操作モードに単一の操作レバーで対応可能とした高い操作性と安全性をもつ高所作業車の操作装置を提供する。
【解決手段】 操作装置には三つの異なる動作軸X,Y,Z毎にそれぞれ異なった操作信号を出力する三軸操作レバー20を備え、該三軸操作レバー20の各動作軸X,Y,Z上における各操作量に基づいて伸縮バルブ22の駆動量「SL」と上記起伏バルブ23の駆動量「Sθ」と上記旋回バルブ24の駆動量「Sφ」とを選択的に算出することで個別操作モードと水平操作モードと垂直操作モードの各操作モードに対応することができ、これによって、操作が格段に簡便化され高い操作性をもつ高所作業車の操作装置が得られる。
操作装置には、「個別操作モード」と「自動操作モード」である「水平操作モード」と「垂直操作モード」とを選択する「操作内容切替スイッチ21」がそなえられており、その「操作内容切替スイッチ」に電源が投入されると強制的に「個別操作モード」に設定されるようになっている。
(もっと読む)
1 - 20 / 70
[ Back to top ]