
Fターム[3F333FE07]の内容
フォークリフトと高所作業車 (11,384) | 制御機器 (803) | データーキャリア読取装置 (23)
Fターム[3F333FE07]に分類される特許
1 - 20 / 23
搬送装置

【課題】RFIDタグが付された荷物を搬送するための搬送装置において、被搬送物品に付されたRFIDタグを精度良く読み取ることを可能とすること。
【解決手段】搬送装置1は、その前面に設けられた物品搬送部5と、この物品搬送部5の動作を操作するための操作部10とを有している。物品搬送部5には、RFIDタグを読み書きするためのリーダライタ用アンテナ20が設けられている。さらに、リーダライタ用アンテナ20の背面には、アンテナ20よりも大きな面積の網状金属部材25が設けられている。
(もっと読む)
データレコーダ、運行管理装置

【課題】フォークリフトの移動の停止を正確に判定する。
【解決手段】フォークリフト20の移動速度と、その移動方向が前進と後退のいずれであるかを表す識別信号とをデータレコーダ10で取得し、この移動速度と移動方向との組み合わせが所定の条件を満たすときに、フォークリフト20が備えるセンサの検出結果に関わらず、フォークリフト20の移動が停止したと判定して、この判定結果を含む運行データを記録媒体60に記録し、この記録データを運行管理装置70で解析する。
(もっと読む)
産業車両用異常検出システム及び産業車両用異常検出方法
【課題】稼働状態に関するパラメータに基づいて、精度よく異常の有無を検出可能な産業車両用異常検出システム及び産業車両用異常検出方法を提供する。
【解決手段】本発明の産業車両用異常検出システム(100)は、産業車両の稼働状態に関する複数のパラメータを取得し、データベース(114)に格納された他の産業車両のパラメータと比較して、異常の有無を検出する。特に、データベース(114)に格納されたパラメータを重回帰分析することによって、パラメータを変数とする標準特性関数を算出する標準特性関数算出部(112)と、取得したパラメータと標準特性関数との偏差が所定値以上であるか否かに基づいて、異常の有無を検出する異常検出部(113)とを備えたことを特徴とする。
(もっと読む)
自動読取装置及びフォークリフトを用いた自動読取システム
【課題】既存の立体倉庫や自動倉庫といった高層、多段の倉庫に格納されたICタグが付された荷物を、そのまま利用できる自動読取装置及びフォークリフトを用いた自動読取システムを提供する。
【解決手段】倉庫40に格納された物品のRFタグ41,42の情報を読み取って情報収集を行なう自動読取装置20であって、フォークリフト10のフォーク15を挿入可能な空間を備えた基台と、基台上に配設された枠体のフォーク15を挿入可能な空間の方向に対して交差する方向に所定間隔で少なくとも高さ方向に所定数配設されたRFタグ読取用のアンテナ23と、アンテナ23で取得した情報を送信する手段を有する制御装置24と、を備え、アンテナ23の配置間隔は、倉庫40の棚の間隔に合わせて配置されている。
(もっと読む)
在庫管理システム
【課題】在庫管理システムとして信頼性の高い在庫管理システムを得ること。
【解決手段】各物品格納部に備えられる格納部識別タグLATと、搬送車識別タグFATとを備えて構成され、格納部識別タグLATは、格納部識別情報を管理コントローラMCに送信可能に構成され、搬送車識別タグFATは、搬送車識別情報を格納部識別タグLATに送信可能に構成され、格納部識別タグLATは、格納部識別情報と受信した搬送車識別情報とを共に、管理コントローラMCに送信する構成で、管理コントローラMCは、受信した格納部識別情報及び搬送車識別情報に基づいて、在庫管理情報を生成する。
(もっと読む)
フォークリフトのツメにRFIDリーダを搭載したスマート・ロジスティック・システム
無線自動識別(RFID)タグに呼掛けを行うためのスマート・ロジスティック・システムは、a)フォークリフトのツメに搭載するのに適したポータブルな支持および保護構造であって、上面および底面を含む取り付け部を含み、また支持および保護構造の少なくとも一部分に沿って各々延びるコンポーネント部を含み、取り付け部が支持および保護構造をツメに固定させるように構成されており、コンポーネント部がコンパートメントを含んでいる支持および保護構造と、b)コンパートメントの内側にしっかりと固定されて収容されたRFIDリーダと、c)RFIDアンテナと、d)コンポーネント部にしっかりと固定されて収容された電源とを含む。支持および保護構造は、ポータブル型であり、RFIDリーダは、自給自足型であって、スマート・ロジスティック・システムは、数秒以内でフォークリフトの別のツメに移し替えることができる。 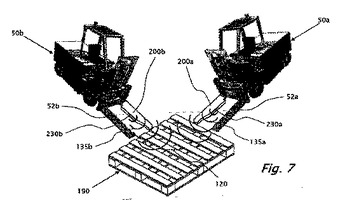 (もっと読む)
(もっと読む)
積荷取扱クランプの制御システム
積荷取扱クランプ(10)の制御システムは、第1積荷接触面および第2積荷接触面(20,22)を有し、該積荷接触面間に配置する積荷(12)を選択的に把持および釈放する。これら積荷接触面のうち少なくとも一方を、液圧アクチュエータ(26,28)によって他方の積荷接触面に向けて選択的に移動可能とする。少なくとも1個の流体バルブ組立体(70)は、積荷クランプ動作において、アクチュエータ対して、積荷接触面のうち一方を他方に向けて移動させることが可能な最大液圧クランプ圧力を可変的に調整することができる。積荷ジオメトリセンサは(50)、積荷における幾何学的形状のジオメトリプロファイルの関数として変化する電気的効果を生成するのが好ましい。データレシーバ(32)は、積荷ジオメトリ以外で、少なくとも1個の積荷の特徴に関する積荷識別情報をも取得するのが好ましい。制御器(40)は、データレシーバおよび積荷ジオメトリセンサに応答して、最大液圧クランプ圧力によるバルブ組立体の調整を制御するように動作する。初期クランプ閉鎖動作中に、積荷クランプ動作に対する予備段階として、制御器は、最大液圧クランプ圧力よりも大きい最大液圧閉鎖圧力でのアクチュエータに対して、積荷接触面のうち一方を他方に向けて移動させることができるようにするのが好ましい。その後、制御器は、実質的に最大液圧クランプ圧よりも大きくない圧力レベルでの積荷クランプ動作を可能にする。  (もっと読む)
(もっと読む)
荷役用産業車両の管理システム
【課題】走行だけでなく荷役の作業も行う荷役用産業車両であっても、効率を悪くする運転操作を的確に抽出し、改善の指示を行う荷役産業用車両の管理システムを提供する。
【解決手段】
管理システム100は、走行仕事量演算手段と、荷役上昇仕事量演算手段と、フォークリフト10の運転状態を表わす複数の運転変数を取得する運転変数取得手段と、消費量取得手段と、燃料の単位消費量当たりの合計仕事量を効率として記憶するように構成されている記憶手段と、統計解析を実施することにより、複数の運転変数の中から、燃料の単位消費量当りの合計仕事量に与える影響が大きい運転変数を抽出する変数抽出手段と、変数抽出手段において抽出された結果に基づいて、燃料の単位消費量当りの合計仕事量を改善するための指示を出力する出力装置62と、を備える。
(もっと読む)
産業車両の積算装置
【課題】
産業車両の走行系および作業系の積算処理を行う機器が分散していたとしても、各機器に一括して積算処理及び積算処理の中断を指示できるようにし、積算処理と積算処理の中断との切換作業を簡易にすることによって作業時間を短縮する。
【解決手段】
積算指令部は、各積算処理部の積算処理を指示する積算指令信号及び積算処理の中断を指示する積算中断指令信号を生成し、データ伝送路に生成した信号を送信する。各積算処理部はデータ伝送路から信号を受信する。各積算処理部は積算指令信号を受信した場合は積算処理を行い、積算指令信号を受信しない場合は積算処理を中断する。
(もっと読む)
フォークリフト
【課題】 RFIDタグの位置にかかわらず確実に読み取りを行うことができるRFIDタグ用のリーダを備えるフォークリフトを提供する。
【解決手段】 フォークリフトは、RFIDタグに格納される情報を読み取るリーダが設けられており、リーダのアンテナ26を収容する穴部18bが設けられたフォーク18と、穴部18bにおいて、アンテナ26をフォーク18の長手方向と沿う回転軸を中心に回転可能に支持する支持手段である支持部材28、軸受け部18c及びモータ30と、アンテナ26を回転駆動させる駆動手段であるモータ30とを備える。
(もっと読む)
位置同定システム
【課題】位置の情報が書き込まれたタグ等のランドマークを走行路の床面に設けなくても移動体の位置を把握することができる位置同定システムを提供することを課題とする。
【解決手段】送信器1により外部に超音波が送信され、この超音波の周波数は時間に比例して上昇される。送信器1から送信された超音波は周辺の障害物により反射されて受信器2で受信され、混合器3はこの反射波とそのときの送信器1の超音波とを互いに混合してビートを発生させる。混合器3の出力は、ローパスフィルタ4及びA/D変換器5を介して高速フーリエ変換部6で周波数スペクトルに変換され、相関値算出部7は、記憶部9に予め記憶されている基準の周波数スペクトルと、高速フーリエ変換部6から入力された現在の周波数スペクトルとの相関値を算出し、位置判定部8はその相関値に基づいて移動体Mの位置の判定を行う。
(もっと読む)
運搬用車両及びコンテナ管理システム
【課題】サーバと運搬用車両とが通信を行うようにして、コンテナヤードでの入出庫作業に伴うコンテナの一元的な管理を可能とするとともに、現場の作業者の負担をできるだけ軽減させる。
【解決手段】フォークリフト200は、コンテナ100にフォーク形の腕201を差し入れる際に、アンテナ202を介して、該コンテナ100に貼付されたRFIDタグ102のID情報を読み取るコントロールユニット203と、所定の情報を画面表示するとともに、サーバ300と通信可能とされた車載端末205と、車載のバッテリ209を電源として、コントロールユニット203や車載端末205に電源を供給する電源制御装置210とを備え、電源制御装置210は、作業終了時に行われる終了操作があったとき、バッテリ209からコントロールユニット203や車載端末205への電源供給を遮断する電源遮断手段を具備する。
(もっと読む)
作業車の制御装置
【課題】作業者のレバー操作とは無関係なアクチュエータの作動によるブームの作動を確実に検出する。
【解決手段】高所作業車1が、ブーム5を作動させる起伏シリンダ52等と、ブーム操作レバー12の操作に応じて操作信号を出力するブーム操作センサS1と、ブーム操作センサS1から出力される各操作信号に基づいて起伏シリンダ52等をそれぞれ作動させてブーム5の作動制御を行うブーム作動制御回路31とを有し、その上で、起伏角検出器21等と、ブーム操作センサS1から起伏信号が起伏シリンダ52を作動させるために出力されている状態で、この起伏信号に基づいて作動している起伏シリンダ52以外のアクチュエータの作動状態の変化量を伸長量検出器22等による検出に基づいて積算して算出し積算変化量として更新記憶する変化量算出回路32とを有し、積算変化量が所定値を超えた場合に、ブームの作動が規制される。
(もっと読む)
RFIDリーダアンテナ及び物品情報及びロケーション情報読み取り機能付きフォークリフト車
【課題】本発明は、複数のRFIDタグから同時に識別情報を受信するためのRFIDリーダアンテナを提供することを目的とする。
【解決手段】本RFIDリーダアンテナは、互いにアンテナ面(10、20)の方向を異ならせて違うRFIDタグが検出されるように配置された少なくとも二つのループアンテナ(1、2)を有し、上記少なくとも二つのループアンテナを、これらのループアンテナに電流(I、I´)を流した場合に一方のループアンテナに発生する磁束B(又はB´)が他方のループアンテナの磁束B´(又はB)を打ち消さない配置関係となるように構成する。
(もっと読む)
フォークリフトのICタグ読み取り装置
【課題】電子機器の高い信頼性を確保することができるフォークリフトのICタグ読み取り装置を提供することを課題とする。
【解決手段】リフトブラケット4に反射板6が回転自在に取り付けられると共に、機台のフロントパネルの前面にアンテナ8が回転自在に取り付けられている。制御部は、揚高センサにより検出されるフォーク5の昇降高さに基づいて反射板用モータ及びアンテナ用モータを制御することにより、反射板6及びアンテナ8をそれぞれフォーク5の昇降高さに応じた所定の回転角度に回転し、反射板6を介してパレットPのICタグ19とアンテナ8との間の信号の送受信を可能な状態にする。ICタグ19が発した信号は、反射板6で反射されることによりアンテナ8で受信され、このアンテナ8で受信された信号からリーダライタがICタグ19の情報を読み取る。
(もっと読む)
搬送装置のICタグ読み取り装置
【課題】1つのアンテナで前方及び床面の双方のICタグからの信号をそれぞれ受信することができる搬送装置のICタグ読み取り装置を提供する。
【解決手段】機台3の昇降部6前面には、アンテナ7が固定されると共に、反射板8が非反射位置Aと反射位置Bとの間で回転自在に配置されている。反射板8が非反射位置Aにあると、反射板8はアンテナ7の前方に重なることなく水平に位置するため、搬送装置1の前方に位置するパレットの第1のICタグとアンテナ7との間で直接に信号の送受信が可能な状態になる。また、反射板8が反射位置Bにあると、反射板8はアンテナ7の前方に斜めに傾斜した状態で位置するため、今度は、床面2に埋設されている第2のICタグとアンテナ7との間の信号の送受信が反射板8を介して可能な状態になる。
(もっと読む)
運搬機器の安全操作装置、安全操作方法及び安全操作管理システム
【課題】フォークリフトのような運搬機器の走行中に閥値を超えた衝撃が発生したときに、荷崩れ等の不具合が生じていることを認識して運転者等に警告することにより荷崩れ落下事故を予防し、安全に運搬・搬送する。
【解決手段】荷物cを載置して昇降し得る昇降装置2を備えた車体3から成るフォークリフト等の運搬機器1の安全操作装置であり、昇降装置2が昇降するとき、又は車体3が走行するときに荷物cへ印加された衝撃を検知するために、昇降装置2に取り付けた衝撃センサ6と、衝撃センサ6が、荷物cの荷崩れのような異常状態を検知したときに、その異常状態を警報する警報部7と、衝撃センサ6が検知した異常状態の信号を、運転者等が携帯する携帯端末に送受信する近接通信装置とを備えた。
(もっと読む)
無人フォークリフトの安全装置
【課題】床面上に置かれた障害物を正確に判別して安全に荷の搬送及び移載を行うことができる無人フォークリフトの安全装置を提供する。
【解決手段】制御部は、無人フォークリフト1のパレット検知装置によりパレットPを検知したときに形成される物体検知センサ11〜15のオン状態とオフ状態の双方を含む所定のオン/オフ状態配列パターンを基準パターンとして予め記憶している。パレットPの正面に障害物Sがある場合には、無人フォークリフト1が移載作業位置に接近する際に、5つの物体検知センサ11〜15のうち少なくとも1つのセンサがこの障害物Sを検知してオン状態になり、このときパレット検知装置により形成されるオン/オフ状態配列パターンが基準パターンと一致しないため、制御部は、無人フォークリフト1の走行を停止すると共に荷の移載を停止する。
(もっと読む)
所在管理システム、所在管理方法、所在管理プログラム
【課題】 簡便な構成により、作業者に特別な操作負担を強いることなく、搬送手段による搬送の対象となる搬送対象物の所在管理を行うことのできる技術を提供する。
【解決手段】 搬送手段による搬送の対象となる搬送対象物の所在管理を行う所在管理システムであって、前記搬送対象物が前記搬送手段により搬送されている状態において、該搬送対象物が備える非接触型ICタグから該搬送対象物を識別するための対象物識別情報を取得する対象物識別情報取得部と、前記搬送対象物が前記搬送手段によって搬送されることにより所定の格納場所に対して搬入または搬出されている状態において、該格納場所が備える非接触型ICタグから該格納場所を識別するための格納場所識別情報を取得する格納場所識別情報取得部と、前記対象物識別情報取得部および前記格納場所識別情報取得部における識別情報の取得タイミングと取得された識別情報に基づいて、取得された対象物識別情報に対応する搬送対象物の所在を判定する所在判定部とを備えてなる。
(もっと読む)
運搬装置
【課題】進入が制限された領域への進入を防止できる移動可能な運搬装置を提供する。
【解決手段】移動可能な運搬装置10において、運搬対象となる物品100の管理に用いられる管理ICタグ1a及び進入許可領域と進入制限領域との境界部に備えられた進入制限ICタグ1bとそれぞれ通信する通信部11と、通信部11の出力に応じて通信部11が通信したICタグが進入制限ICタグ1bであるか判別する判別部13と、判別部13からの出力に応じて運搬装置の移動を制限する移動制限部15とを備える構成とした。
(もっと読む)
1 - 20 / 23
[ Back to top ]