
Fターム[3G093FA07]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御部の特徴 (6,324) | 演算部内での処理 (5,972) | 帰還制御 (2,284) | 目標値の変更・補正 (928)
Fターム[3G093FA07]に分類される特許
921 - 928 / 928
電力の排ガス駆動式発電機およびハイブリッド車を含む車両における高度補償
ハイブリッド車は、内燃機関、電気モーター、およびトランスミッションを備える。ターボチャージャーは、内燃機関と流体連通する。さらに、発電機は、ターボチャージャーに機械的に結合され、それにより、内燃機関からの排ガスにより駆動される。発電機は、電力をモーターおよび/または電池に供給すると同時に、内燃機関の高度補償を行い、高度および環境条件が変化したときも内燃機関の出力が同じ出力および効率になるようにできる。ターボチャージャーは、さらに、必要ならば、出力増大にも使用することができる。排ガス駆動式発電機システムを電池充電および/または電気アクセサリの電力供給のため従来の車両にも配備することができ、それによりオルタネータの代わりとすることができる。  (もっと読む)
(もっと読む)
作業車両用エンジンのパワー出力の制御方法及び制御装置
【課題】 エンジン制御装置40は、建設機械などの作業車両の作業の状態を検出して自動的にエンジンのパワー出力能力を制御する。アームの油圧シリンダ13の油圧検出器45、アームやバケットの操作指令の検出器32,33、変速機23のシフト操作検出器31、車体の傾斜角検出器46、走行加速度検出器47、アクセル開度検出器48からの検出信号に基づいて、掘削又は登坂走行が行われているか判定される。判定の結果、掘削又は登坂走行が行われている時は高パワー出力能力で、それ以外の時は低パワー出力能力で、エンジンが運転される。 (もっと読む)
駆動系の制御方法
本発明は、内燃機関(1)と電気モータ(6)とを備えた車両の駆動系を制御する方法であって、それによって内燃機関の駆動軸(4)を電気モータ(6)を用いて加速させることが可能である。アップシフトの発生及び/又はアップシフト工程の開始において、駆動軸(4)のアイドリング回転数を電気モータ(6)によって増加させることが可能である。ターボ過給機が充填圧力を増加させるために設けられる場合、電気モータは、アイドリング回転数を増加させることで、低回転速度のターボ過給機の低効率を補うことが可能である。 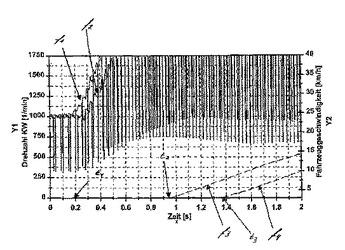 (もっと読む)
(もっと読む)
分離された機械的制御と電気的制御を有する動力装置の制御方法及び装置
本発明は、車両の動力装置の制御方法に関する。本発明は、動力装置による車両の特定の駆動モードに存する。エンジントルク抽出モードにおいては、本制御方法は、電気エネルギのバッファ要素の充電レベル(Ucapa)の測定値と、上記電気機械(Me111、Me212)の回転数(ωe1、ωe2)及び電気機械から供給されるトルク(Te1、Te2)の測定値のみを利用して、第1段階において、熱エンジンのトルク(Tice#)を計算し、車輪へ加えられるトルクと熱エンジンの回転数を同時に調整しながら、推定された機械的な特徴を表わす機械的な制御信号(u0)を作成し;次いで、第2段階において、機械的な制御信号に基づいて第1及び第2の電気機械のトルク(Te1#、Te2#)を計算し、エネルギレベルを調整するエネルギ的な制御信号を作成する;ことからなる。 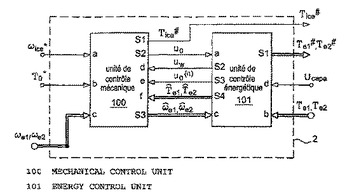 (もっと読む)
(もっと読む)
エンジンブレーキ運転における内燃機関を運転するための方法および装置
以下のステップ:すなわち、
内燃機関10の開始回転数の超過を含む予め規定された開始条件が満たされた場合に、内燃機関10の出力調整部材18;28;30に対する制御信号の監視を開始し、開始後、
内燃機関10の出力調整部材18;28;30に対する制御信号を閾値と比較し、制御信号が閾値を上回った場合に欠陥反応をトリガして、エンジンブレーキ運転における内燃機関10を運転するための方法が提案される。この方法は、開始回転数を、制御信号の形成へのアイドリング運転調整部50の介入の関数として変化させることによって特徴付けられている。さらに、このような方法を制御する制御装置20が提案される。  (もっと読む)
(もっと読む)
車両の自動変速装置
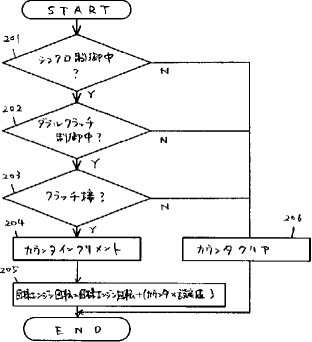
【課題】 ダブルクラッチ制御でエンジン回転の上昇が遅いとき、その回転上昇を早め、変速時間の長期化及び変速不能を防止する。
【解決手段】 機械的なシンクロ機構を有しないメインギヤの変速に際し所定のシンクロ制御を実行し、且つ変速機のシフトダウンの際に所定のダブルクラッチ制御を実行するものにあって、ダブルクラッチ制御が、クラッチ断及びギヤ抜き後、エンジン回転を所定の目標エンジン回転まで上昇させてクラッチを接し、目標メインギヤ段におけるドグギヤ回転をスリーブ回転付近まで上昇させる制御を含み、ダブルクラッチ制御の開始から所定時間が経過してもなおエンジン回転が目標エンジン回転に到達しなかったときは、目標エンジン回転を高める制御を行う。
(もっと読む)
ハイブリッド車両およびその制御方法

【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
自動車の走行制御装置
【課題】自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地を向上できる。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
(もっと読む)
921 - 928 / 928
[ Back to top ]