
Fターム[3G384DA29]の内容
内燃機関の複合的制御 (199,785) | 目的 (24,795) | 製造時の初期調整、製品ばらつき、誤差補償 (197)
Fターム[3G384DA29]に分類される特許
1 - 20 / 197
回転角度を検出する方法
【課題】従来技術を改良する方法を提供すること
【解決手段】計算ユニットによって、a)第1の印部分を、前記第1のセンサ信号から再現し、b)再現した第1の印部分から、第1の記憶されている印部分を排除するための第1の排除基準を求め、c)第1の排除基準を用いて、第1の記憶されている印部分を排除し、d)記憶されている印部分の総数と、排除された、記憶されていた印部分の数との差が1であるか否かを検査し、差が1である場合にはステップg)へ移行し、当該差が1よりも大きい場合にはステップe)へ移行し、e)第1のセンサ信号から別の印部分を再現し、別の排除基準を求め、別の排除基準を用いて、別の記憶されている印部分を排除し、f)ステップd)を再び実施し、g)排除されていない、記憶されている印部分から第1の回転角度を導出する、第1の回転角度を検出する方法。
(もっと読む)
燃料供給装置

【課題】燃料ポンプに供給される電気特性を最適化し、燃費を向上したり燃料ポンプの劣化促進を抑制することができる燃料供給装置を提供する。
【解決手段】ECUは、低圧燃料供給状態において(ステップS11)、燃料噴射量が一定であり、かつ、燃料温度が推定可能であることを条件に、燃料ポンプユニットの印加電圧を所定値ずつ低減する(ステップS14)。そして、ECUは、空燃比が最もリーンとなる最リーン電圧を取得すると(ステップS17)、初期電圧と最リーン電圧との差からリターン流量Qの変化量を算出する(ステップS18)。
(もっと読む)
内燃機関の学習装置
【課題】クランク角センサにより検出される被検出部の正規位置からのずれ量に関し、そのずれ量を表した数値を高精度で学習可能にする。
【解決手段】パルサ誤差が無いと仮定した場合におけるNE波形を理想波形Wa,Wbと呼び、計測された瞬時回転速度の変化を表した波形を計測波形Va,Vbと呼ぶ場合において、理想波形Wa,Wbから導き出される数式のパラメータを理想パラメータAmot,θmotと呼び、前記計測波形から導き出される数式のパラメータを計測パラメータArow,θrowと呼ぶ場合において、複数の異なる平均NEを基準値として設定し、複数の基準値ごとに対応する理想パラメータを予め記憶しておく。そして、現時点での平均NEに対応する理想パラメータと、現時点で計測した計測パラメータとの誤差Δeを学習する。
(もっと読む)
インジェクタ制御装置
【課題】安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができるインジェクタ制御装置を提供すること。
【解決手段】水晶発振回路11を有し所定のパルス幅のパルス信号である噴射指令信号を出力するマイコン10と、RC発振回路21を有しインジェクタ50のアクチュエータに対する通電を行う制御IC20とを備えるインジェクタ制御装置であって、マイコン10は、制御IC20のRC発振回路21によって生成された内部クロックを用いて計時された到達時間を、水晶発振回路11によって生成された内部クロックを用いて計時された到達時間と同等になるように補正するための補正係数を学習するとともに、インジェクタの開弁時間が開弁時間狙い値となるように、補正係数によって補正された補正済到達時間に応じて噴射指令信号のパルス幅を補正する。
(もっと読む)
空気流量センサ校正装置及び空気流量センサ校正車両
【課題】路上外での試運転による校正を可能とし、吸入空気量の検出精度を向上できる空気流量センサ校正装置及び空気流量センサ校正車両を提供する。
【解決手段】ECM6に着脱自在に接続されてECM6を介して車両2の各部を制御する空気流量センサ校正装置1は、EGRバルブ7を全閉制御するEGR全閉制御部8と、吸気圧力と吸気温度とエンジン回転数を入力変数とし、基本式により吸入空気量を演算する基本式演算部9と、基本式の演算値に補正項を掛けて変動分を補正演算する体積効率補正演算部10と、吸入空気量の演算値とMAFセンサ5による検出値との差分を学習しECM6に校正値として書き込む校正値書込部11とを備える。
(もっと読む)
内燃機関の燃焼制御装置
【課題】内燃機関の構造上の特性の相違を吸収して、正確にノック判定ができる燃焼制御装置を提供する。
【解決手段】標準機器について振動検出値Yに基づいてノック判定するための標準第1判定値TYを記憶する第1記憶手段と、標準機器の所定の運転領域について、イオン検出値Xに基づいてノック判定するための標準第2判定値TXを記憶する第2記憶手段と、個々の内燃機関について、所定の運転領域において複数組の振動信号V1及びイオン信号V2に基づいて、イオン検出値Xと振動検出値Yの関係を示す相関関係Y=G(X)を特定する第1手段と、相関関係Y=G(X)と標準第2判定値TXと、に基づいて実機第1判定値G(TX)を特定する第2手段と、実機第1判定値G(TX)と標準第1判定値TYとの関係に基づいて、標準第1判定値TYを補正する第3手段と、を設ける。
(もっと読む)
内燃機関の燃焼制御装置
【課題】内燃機関の構造上の特性の相違を吸収して、正確にノック判定ができる燃焼制御装置を提供する。
【解決手段】標準機器について振動検出値Yの振動判定値TYを記憶する第1記憶手段と、振動検出値Yと、イオン検出値Xとの標準的な相関関係Y=Fi(X)を記憶する第2記憶手段と、個々の内燃機関について、所定の運転領域において複数組の振動信号V1及びイオン信号V2に基づいて、イオン検出値Xと振動検出値Yの関係を示す相関関係Y=Gi(X)を特定する第1手段と、相関関係Y=Gi(X)と相関関係Y=Fi(X)と、に基づいて、当該運転領域における補正関係AMi(X)を特定する第2手段と、当該運転領域における振動検出値Yに、第2手段が特定する補正関係を作用させて振動検出値Yを補正する第3手段と、を設けた。
(もっと読む)
多気筒内燃機関の気筒間空燃比ばらつき異常検出装置
【課題】点火時期フィードバック制御を実行可能な多気筒内燃機関において、気筒間空燃比ばらつき異常をより適切に検出する。
【課題手段】燃料噴射量を変更(S705,S729)したときの回転変動に基づき気筒間空燃比ばらつき異常を検出(S713)するばらつき異常検出処理と、回転変動を抑制するように点火時期を気筒別にフィードバック補正する点火時期フィードバック制御処理とを実行するようにした装置において、ばらつき異常検出処理では、フィードバック補正の補正量を考慮してばらつき異常を検出する(S711)。吸気系または燃料供給系の動作の不健全さを放置し温存する傾向を助長することなく、通常の運転動作を維持しながら、気筒間空燃比ばらつき異常として検出することができ、気筒間空燃比ばらつき異常をより適切に検出することができる。
(もっと読む)
エンジン制御装置
【課題】エンジンの燃焼状態の制御性改善によりエンジン性能を好適に制御し、しかもアクチュエータにおいて個体差や経時変化が生じていてもそれを反映した好適な制御を実現する。
【解決手段】ECU20は、複数の燃焼パラメータと制御パラメータとの相関を定義した第1相関データを用いて制御パラメータの指令値を算出する。この場合、複数の燃焼パラメータは、エンジン燃焼室内での燃焼発生に伴い時系列で変化する特定パラメータであって、かつ該特定パラメータについてあらかじめ定めた複数の時系列点でのデータである時系列データを含み、第1相関データは、各時系列点での時系列データと制御パラメータとの相関を定義したものである。そして、ECU20は、各時系列点での時系列データの目標値を設定するとともに、第1相関データを用い、各時系列点での時系列データの目標値に基づいて制御パラメータの指令値を算出する。
(もっと読む)
エンジン適合装置
【課題】適合の精度を高め、しかも適合作業の簡易化を図る。
【解決手段】適合ECU25は、エンジン10の適合を行い適合値をエンジンECU20のメモリに登録するものである。適合ECU25は、複数の性能パラメータと複数の燃焼パラメータとの相関を定義した第1相関データと、複数の燃焼パラメータと複数の制御パラメータとの相関を定義した第2相関データとを用いて複数の制御パラメータの指令値を算出し、アクチュエータの作動を制御する。このとき、各性能パラメータの目標値と同性能パラメータの実値との偏差を無くすように性能パラメータのフィードバック制御が実施される。また、適合ECU25は、エンジンの適合に際し、適合時の各運転条件において、適合目標値に対して複数の性能パラメータの実値が収束していることを判定し、各性能パラメータの収束状態での制御パラメータの指令値を適合値としてメモリに登録する。
(もっと読む)
エンジントルク推定装置
【課題】エンジンのクランク角の検出精度を向上する。
【解決手段】エンジントルク推定装置(100)は、複数の気筒を有するエンジン(10)と、エンジンのクランク軸(101)に連結されたモータ(11)と、クランク軸の回転角度であるエンジン回転角を検出する第1回転角度検出手段(31)と、を備えるハイブリッド車両(1)に搭載される。エンジントルク推定装置は、ハイブリッド車両のモータリング中に、(i)複数の気筒のうち圧縮行程にある2以上の気筒各々に係る角速度が同じになる第1関係と、(ii)複数の気筒のうち膨張行程にある2以上の気筒各々に係る角速度が同じになる第2関係と、を用いて、検出されたエンジン回転角の誤差を算出する算出手段(20)を備える。
(もっと読む)
エンジン制御装置
【課題】量産公差範囲内でのリラクタ寸法のバラツキによるエンジン負荷の検出精度の低下を防止する。
【解決手段】エンジン制御装置は、リラクタ4を検出してクランクパルスを出力するパルス発生器PCを有する。角速度算出部411は圧縮上死点TDC近傍の所定区間で出力される2つのクランクパルスの間隔に基づいて第1クランク角速度ω10を算出するとともに、オーバラップトップ上死点OLP近傍で第1クランク角速度ω10を算出したのと同じリラクタ4を検出して発生される2つのクランクパルスの間隔に基づいて第2クランク角速度ω20を算出する。エンジン負荷推定部412は、第2クランク角速度ω20に対する第1クランク角速度ω10の差分Δω360をエンジン負荷として算出する。エンジン負荷は、エンジン5による負の仕事を含めた1サイクル全体の図示平均有効圧力IMEPNETである。
(もっと読む)
エンジン制御装置
【課題】1型式のエンジン70に対するECU11の汎用性を向上させたエンジン制御装置を提供する。
【解決手段】本願発明のエンジン制御装置は、エンジン70と、エンジン70に燃料を噴射する燃料噴射装置117と、エンジン70の駆動状態を検出する検出手段12〜19と、検出手段12〜19の検出情報及びエンジン70固有の出力特性データMに基づき燃料噴射装置117の作動を制御するECU11とを備える。出力特性データMを修正するための修正特性データRLが格納されたデータ格納手段21を有する。ECU11は、データ格納手段21から修正特性データRLを受信している間、修正特性データRLに基づき出力特性データMを修正し、修正後の出力特性データMと検出手段12〜19の検出情報とに基づき前記燃料噴射装置117を作動させる。
(もっと読む)
内燃機関の制御装置
【課題】燃料噴射弁から噴射される燃料の濃度変化をより高い精度で空燃比制御に反映させる。
【解決手段】炭化水素燃料とアルコールとを混合した混合燃料を機関燃料として利用可能な内燃機関を制御する制御装置において、濃度センサの出力に応じて、混合燃料中の単一成分の濃度を、検出濃度として検出すると共に、濃度センサの濃度検出位置から燃料噴射弁まで間の燃料配管の容積に応じて、燃料噴射弁から噴射される直前の混合燃料中の単一成分の濃度の推定値を、推定濃度として算出する。検出濃度が、単調増加又は単調減少を開始したと認められる第1変化点から、内燃機関の排気ガスの濃度が単調増加又は単調減少を開始したと認められる第2変化点までの間の燃料の積算噴射量を、燃料消費量として算出する。燃料センサから燃料噴射弁までの容積と燃料消費量との差に応じて、燃料噴射弁から噴射される燃料噴射量を補正する。
(もっと読む)
エンジン制御システム
【課題】システム状態に対して適切な空燃比フィードバック制御を行い、以ってエミッションの悪化を防止する。
【解決手段】第1燃料と第2燃料とを選択的に切替えて単一エンジンの運転制御を行うエンジン制御システムであって、前記エンジンの排気系に配置された空燃比センサと、各燃料によるエンジン運転時に、前記空燃比センサの出力信号に基づいて空燃比フィードバック制御に必要なフィードバック補正係数を算出すると共に、当該フィードバック補正係数を学習値として不揮発性メモリに記憶させる制御装置と、を具備し、前記制御装置は、一方の燃料による運転中にエンジン運転状態が他方の燃料の強制学習運転状態にある場合、他方の燃料によるエンジン運転に切替える。
(もっと読む)
内燃機関の燃料噴射量制御装置
【課題】筒別空燃比の不均一性の程度を精度良く示すフィルタ処理後不均衡指標値を提供する。
【解決手段】制御装置は、三元触媒に流入する排ガスの空燃比が目標空燃比に一致するように燃料噴射弁から噴射される燃料の量を上流側空燃比センサの出力値に基いてフィードバック補正し、上流側空燃比センサの出力値に基いて、気筒別空燃比の不均一性の程度が大きいほど大きくなる空燃比不均衡指標値を取得し、その空燃比不均衡指標値にノイズ除去のための一次遅れフィルタ処理を施して不均衡指標学習値を取得し、不均衡指標学習値に基いて燃料噴射量を増量する。加えて、制御装置は、上記一次遅れフィルタ処理を行う際、空燃比不均衡指標値の今回値と前回値との差の大きさが閾値以上であるとき、フィルタの時定数を小さくする。
(もっと読む)
燃料噴射制御装置
【課題】学習噴射を実行することにより検出する実噴射量特性に基づいて基本噴射特性を推定する燃料噴射制御装置を提供する。
【解決手段】燃料噴射制御装置は、走行中の燃料噴射状態において、学習用のパイロット噴射が加わったことにより変動するエンジン運転状態の実変動量として、エンジンの仕事量に相当する仕事相当量を算出する。燃料噴射制御装置は、指令パイロット噴射量を0mm3から1mm3ずつ増加させ、指令パイロット噴射量と仕事相当量との相関を表す学習用データに対して、最小二乗法で実噴射特性100を表す1次式を算出する。実噴射特性100を、指令パイロット噴射量=0mm3、仕事相当量=0の原点を通るように指令噴射量の増減方向に平行移動することにより、基本噴射特性110を推定し、基本噴射特性110と実噴射特性100との指令噴射量の増減方向の差(ΔQ)を、噴射量を補正するときの学習値として算出する。
(もっと読む)
エンジン制御パラメータの適合方法及び適合装置
【課題】エンジンの制御パラメータを適合する際に用いるエンジン特性モデルの精度向上(制御パラメータの適合値の精度向上)と工数削減とを両立させる。
【解決手段】適合対象となる制御パラメータに対する物理パラメータを選択する(101)。適合対象となる制御パラメータがVCT進角値であれば、それに対する物理パラメータとして、筒内EGR率、筒内流速、吸気温度、ポンピングロス、吸気管圧力、実圧縮比の中から選択し、適合対象となる制御パラメータが噴射時期であれば、それに対する物理パラメータとして、噴霧移動距離、霧化時間、蒸発燃料量、噴射時筒内流速の中から選択する。次に、制御パラメータと物理パラメータとの関係を計測データにより算出し(102)、制御パラメータの実験計画範囲の境界を定める物理パラメータの判定閾値を生じさせる制御パラメータの値を算出して(103)、制御パラメータの実験計画範囲を決定する(104)。
(もっと読む)
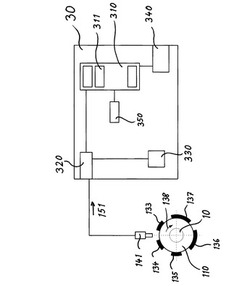
制御システム及び通信機能付センサ装置及び電子制御装置
【課題】ノードID設定済装置の設置ミスにより、不都合が生じるのを防止する。
【解決手段】圧力センサ11及び通信ドライバ15を内蔵する気筒毎のインジェクタ10と、各インジェクタの通信ドライバに共通の通信線LCを介して接続された電子制御装置50とを備え、各インジェクタのセンサ信号が個別のセンサ出力線LSを通じて電子制御装置に入力されるシステムで、電子制御装置は、ID設定命令の宛先としないインジェクタのセンサ出力線を、センサ信号を伝送可能な通常状態に設定したまま、宛先とするインジェクタのセンサ出力線を上記通常状態ではとりえない0Vに設定後、上記命令を通信線を通じてインジェクタに入力する。これにより、各インジェクタにノードIDを設定する。インジェクタは、センサ出力線に接続された出力回路12の動作状態に基づき、センサ出力線が0Vに設定されたか否かを判定し、ID設定命令が自装置宛か否かを判定する。
(もっと読む)
インジェクタ交換判定装置
【課題】制御装置側記憶手段の特性データを変更させることなくインジェクタの交換が為されたことの有無を判定する、インジェクタ交換判定装置を提供する。
【解決手段】エンジンの運転中にインジェクタの特性データを学習して、ECU(制御装置側記憶手段)に記憶されている特性データを学習値に逐次更新する学習手段S12と、エンジンの運転終了時に、INJ側EEPROM(インジェクタ側記憶手段)に記憶されている特性データを、ECUに記憶されている特性データに書き換え更新する更新手段S21と、エンジンの運転開始時に、ECUに記憶されている特性データとINJ側EEPROMに記憶されている特性データとが一致するか否かを判定する照合手段S32と、不一致判定された場合には、ECU側EEPROMの特性データを変更させることなくインジェクタの交換が為されたと判定する交換判定手段S33と、を備える。
(もっと読む)
1 - 20 / 197
[ Back to top ]