
Fターム[3J057GA27]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御の目的 (2,601) | 走行性の向上 (160) | 加速性 (30)
Fターム[3J057GA27]に分類される特許
1 - 20 / 30
自動クラッチ制御装置およびその変速制御方法
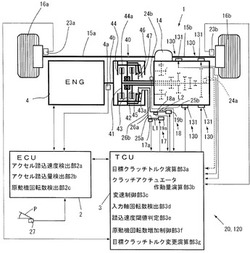
【課題】運転者がアクセルを踏込んだ速度に応じて設定される目標クラッチトルクでクラッチを制御することにより運転者の要求する加速の実現が可能である変速機の自動クラッチ制御装置およびその変速制御方法を提供する。
【解決手段】クラッチ40と、目標クラッチトルク演算部3aと、変速制御部3cと、アクセル踏込速度検出部2aと、原動機回転数検出部2cと、入力軸回転数検出部3dと、アクセル踏込速度Vacが1つ以上の所定の踏込速度閾値を超えるか否かを判定する踏込速度閾値判定部3eと、いずれかの踏込速度閾値を超えた場合に入力軸と原動機4とを切離後、成立された低速ギヤ段によって増加している入力軸回転数に一致させるよう原動機回転数Neを増加制御する原動機回転数増加制御部3fと、目標クラッチトルクTcaをアクセル踏込速度Vacの大きさに応じて変更演算する目標クラッチトルク変更演算部3gと、を備える。
(もっと読む)
車両用駆動制御装置および車両用駆動装置の制御方法

【課題】クラッチ機構の接続時において、車両に発生する不快なショックを低減することが可能な車両用駆動制御装置および車両用駆動装置の制御方法の提供。
【解決手段】エンジン2と駆動輪18R、18Lとの間には、電動モータ6が直列に配置されている。エンジン2と電動モータ6との間にはクラッチ装置5が設けられ、駆動輪18R、18Lはエンジン2または電動モータ6によって駆動される。クラッチ装置5を切断状態から接続状態へと作動させる際に、車両VEが加速指向にあることが検出された場合には、エンジン2の回転速度Neを電動モータ6の回転速度Nmより大きい加速指向目標値NHにした後にクラッチ装置5を係合させ、車両VEが減速指向にあることが検出された場合には、エンジン2の回転速度Neを電動モータ6の回転速度Nmより小さい減速指向目標値NLにした後にクラッチ装置5を係合させる。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンとエンジン断続用クラッチと電動機と流体伝動装置とを備えた車両用駆動装置において、燃費悪化を抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】クラッチスリップ制御手段148は、車両6の加速操作時には、エンジン回転速度Neをタービン回転速度Ntに一致させるようにエンジン断続用クラッチK0をスリップさせるクラッチスリップ制御を実行する。従って、車両6の加速操作時にエンジン断続用クラッチK0を完全係合状態にする場合と比較して、車両加速中のエンジン10の回転加速度が低められエンジン10の慣性トルクが小さくなり、エンジン回転速度Neが低く推移するので、車両6の燃費悪化を抑制することができる。また、前記クラッチスリップ制御ではエンジン回転速度Neはタービン回転速度Ntに一致するように制御されるので、運転者に与える違和感を低減できる。
(もっと読む)
惰行制御装置
【課題】アクセルペダルの急操作に対する加速の応答性が優れている惰行制御装置を提供する。
【解決手段】エンジンが外部に対して仕事をしないで運転されているときに、クラッチを断にすると共にエンジン回転数を目標エンジン回転数に低下させて惰行制御を開始する惰行制御実行部3と、惰行制御終了時のアクセルペダル操作加速度に応じたクラッチ接速度でクラッチを接に制御するクラッチ接制御部6とを備える。
(もっと読む)
惰行制御装置
【課題】乗り心地を向上させ、ドライバーの不快感を低減することが可能な惰行制御装置を提供する。
【解決手段】惰行制御中は惰行許可フラグをオフにし、惰行制御中でなく、かつ惰行制御終了条件が成立したときに惰行許可フラグをオンにする惰行許可フラグ制御部6を備え、惰行制御実行判定部5は、惰行許可フラグがオンであるときのみ惰行制御を開始するようにされる。
(もっと読む)
惰行制御装置
【課題】アクセルペダルの急操作に対する加速の応答性が優れている惰行制御装置を提供する。
【解決手段】惰行制御終了時にクラッチ回転数に対して接許容範囲内までエンジン回転数を上昇させてからクラッチを接する回転合わせ制御部4と、前記惰行制御終了時のアクセルペダル操作加速度に反比例させて回転合わせ制限時間を設定し、回転合わせ制御が開始されてから回転合わせ制限時間が経過すると、エンジン回転数にかかわらずクラッチを接するクラッチ強制接制御部5とを備える。
(もっと読む)
車両用駆動系摩擦要素の制御装置
【課題】摩擦要素の耐久性向上と、車両の加速性能の向上とを両立することができる車両用駆動系摩擦要素の制御装置を提供すること。
【解決手段】車両の駆動源(エンジンEng)と駆動輪(左右駆動輪LT,RT)との間に配置されてトルク伝達を断接する摩擦要素(発進クラッチCL1)をスリップ締結する摩擦要素制御部(図4)において、クラッチ放熱パワー演算手段(ステップS11)により求めた摩擦要素が吸収可能な最大エネルギーと、クラッチ吸収パワー演算部(ステップS12)により求めた摩擦要素が吸収するエネルギーとが一致するようにクラッチ伝達トルク制限値を設定し、差回転演算手段(ステップS2)により求めた摩擦要素CL1の差回転ΔNが小さいほどクラッチ伝達トルク制限値を高くする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の加速応答性を確保することができると共に、ドライバーのアクセル操作に対するドライバビリティを向上できるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを断接する第1クラッチCL1と、モータMGと駆動輪LT,RTとを断接する第2クラッチCL2とを駆動系に有したハイブリッド車両の制御装置において、第2クラッチCL2がスリップ締結した際に第1クラッチCL1を介したモータMGのトルクを用いてエンジンEngを始動させる発進制御手段(図4)は、停車状態を検出したときに第1クラッチCL1を締結する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 急減速に伴うエンジンストールの回避と再加速時の加速性能の確保との両立を図ることができるハイブリッド車両の制御装置を提供する。
【解決手段】 エンジンEと、モータジェネレータMGと、モータジェネレータMGと駆動輪RL,RRとの間に介装した自動変速機ATと、エンジンEとモータジェネレータMGとを断接可能な第1クラッチCL1と、車両の制動開始を検出する制動開始検出部401と、エンジンEのエンジン回転数低下量を検出するエンジン回転数低下量検出部402と、車両の制動開始時点からのエンジン回転数低下量が自動変速機ATの現変速段で回転数閾値Neoを維持可能な場合には、現変速段を維持し、現変速段で回転数閾値Neoを維持不能な場合には、変速時間に基づき決定される選択可能な変速段であって回転数閾値Neoを維持可能な変速段のうち最も高い変速段に変速し、それ以外のとき第1クラッチCL1を開放するエンジン回転数維持制御部403と、を備える。
(もっと読む)
車両の制御装置
【課題】 発進クラッチの伝達トルクの指令値と実際値との偏差を小さくし、運転者の所望の加速性能を得ることができるハイブリッド車両のクラッチ制御装置を提供すること。
【解決手段】 駆動トルク目標値に応じた発進クラッチのトルク容量基本目標値を演算し、モータを回転数制御しているときには、モータトルク相当値がトルク基本容量目標値より小さいときにはトルク容量基本目標値より大きな値をトルク容量目標値とし、モータトルク相当値がトルク容量基本目標値より大きいときにはトルク容量基本目標値よりも小さな値をトルク容量目標値とするようにした。
(もっと読む)
変速制御システムおよび車両
【課題】変速機の円滑なシフトアップを可能にする変速制御システムを提供する。
【解決手段】変速機のシフトアップ時のトルク復帰期間において、エンジントルクおよびクラッチトルクが並行して上昇される。エンジントルクの目標値およびクラッチトルクの目標値は、クラッチトルクがエンジントルクよりも大きい値で変化するように設定される。クラッチトルクの目標値は、クラッチにおいて発生されるエネルギとエンジンにおいて発生されるエネルギとの差が、エンジンの回転速度を目標回転速度まで低下させるためのエネルギに略一致するように設定される。
(もっと読む)
車両の駆動制御装置
【課題】簡単な制御で加速フィーリングを向上することのできる車両の駆動制御装置を提供すること。
【解決手段】キックダウンの開始のときに、クラッチ4を半クラッチ状態としてクラッチ4の伝達トルクを低下させる。車両駆動トルクが落ち込まずに最適な加速特性が得られるように、クラッチ4の伝達トルクの制御に基づいて、CVT5の入力トルクを制御する。CVT5の変速比を厳密に制御する必要がない。クラッチ4の滑り率が例えば5%以下の正の値をとるように、CVT5の変速比を制御すれば十分であり、CVT5の伝達トルクを厳密に制御する必要がない。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の加速応答性を確保することができると共に、ドライバーのアクセル操作に対するドライバビリティを向上できるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータジェネレータMGと第1クラッチCL1と第2クラッチCL2を介装した駆動系を備えたFRハイブリッド車両である。「EVモード」のとき、加速要求があるとエンジンEngをモータジェネレータMGにより始動するエンジン始動要求を出し、「HEVモード」に遷移するモード遷移制御手段(図4)は、エンジン始動要求があると第2クラッチCL2をスリップ締結し、第2クラッチCL2のスリップ判定中から第1クラッチCL1を締結してエンジンEngの始動を開始し、エンジンEngが完爆した後に第1クラッチCL1をロックアップ締結すると共に、第2クラッチCL2をエンジンEngの完爆前から目標駆動力相当となるようにトルク容量制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 マニュアルシフト機能付き自動変速機が搭載されたハイブリッド車両の加速応答性および運転性をともに向上できる制御装置を提供すること。
【解決手段】 エンジン使用走行モード中に手動変速制御から自動変速制御へ切り替えられた場合、シフトアップ要求があるときは、エンジン回転数の低下を待ってモータ使用走行モードに遷移する。
(もっと読む)
車両発進時にクラッチを操作する方法
【課題】発進時における、エンジン速度、ターボスプールアップ及び利用可能なエンジントルクの増大を可能にする。
【解決手段】内側チャンバ110における第1の液圧を第1のレベルから第2のレベルへ上昇させるステップを含み、該ステップにおいて第1の液圧が、前記車両におけるエンジン103と車両におけるトルクコンバータ105のためのインペラ104との間に配置されたクラッチ102をつながった位置へ強制し、外側チャンバ112における第2の液圧をエンジンの速度の関数として第3のレベルから第4のレベルへ減少させるステップを含み、第2の液圧が前記第1の液圧に対抗する。
(もっと読む)
車両のクラッチ制御装置
【課題】エンジンと駆動輪との間の動力伝達経路中に油圧式のクラッチを備える車両のクラッチ制御装置において、クラッチ接続時の動作遅れを抑えて迅速かつスムーズな発進及び変速を可能とする。
【解決手段】前記クラッチを接続状態とする際に、スロットルバルブの開度及び開速度がそれぞれ所定値t1、t2以上である場合には、前記クラッチへの供給油圧を制御するソレノイドバルブに一パルスの駆動電流D2を供給し、その後に該ソレノイドバルブに所定電流を供給して前記クラッチを接続状態へ移行させる。
(もっと読む)
鞍乗型車両のクラッチ制御システム
【課題】自動二輪車の実際の状態を把握し、適切なタイミングでクラッチの制御を行い、駆動輪のグリップ力を適切に保つ。
【解決手段】クラッチ制御システム10は、エンジン40からの駆動力を後輪16に対して断接するクラッチ44と、該クラッチ44の断接をクラッチレバー46又は自動で行うアクチュエータユニット45と、後輪速センサ56と、前輪速センサ58と、クラッチレバーセンサ48と、後輪速Pr及び前輪速Pfに基づいて制御モータ110を制御するコントローラ47とを有する。後輪速Prが前輪速Pfよりも遅く、且つ、後輪速Prと前輪速Pfとの差の絶対値が閾値P1より大きいときに、クラッチ44の伝達力を低下させるように制御モータ110を駆動する。クラッチレバー46の操作量Cが閾値C1より大きいときには、クラッチ44の伝達力を低下させる処理を中断する。
(もっと読む)
変速機の制御装置
【課題】無段変速モードと固定段モードとを有し、ドグ歯を有する電磁クラッチを利用した回転位相同期変速制御を行う変速機において、変速モードの切り替え時に迅速に回転位相同期を確立する。
【解決手段】変速機の制御装置は、モータジェネレータにより回転制御される第1の要素を、第2の要素と係合させるクラッチを有する。クラッチは、例えば第1及び第2の要素として、相互に係合するドグ歯を有するものとすることができる。モータジェネレータの駆動制御は、第1及び第2の駆動制御部により実行される。クラッチの係合時に第1の要素と第2の要素の回転位相を同期させる場合、第1の要素と第2の要素の回転位相を同期させる指示及び制御指令値を第1の駆動制御部が第2の駆動制御部に供給する。第2の駆動制御部は、第1の駆動制御部から与えられた制御指令値をベースとし、自らの制御による補正を行ってモータジェネレータを制御し、第1の要素と第2の要素の回転位相を同期させる。
(もっと読む)
アイドルストップ車の駆動装置
【課題】アイドルストップに際してエンジンのクランク軸と車両の駆動軸との接続が維持されるアイドルストップ制御において、アイドルストップ後の始動が運転者の意思によらずに行われる場合の、始動に伴うショックの発生を回避する。
【解決手段】アイドルストップとしてのエンジンの停止(S109)に際してクラッチを締結させた状態に維持する一方、停止後のエンジンの始動に際し、アイドルストップ解除条件の成立が運転者による発進又はその準備のための操作によるものである場合は、クラッチの締結を維持する(S104,105,108)。他方、アイドルストップ解除条件の成立が運転者による操作とは独立した強制的な始動の要求によるものである場合は、クラッチを開放させて、クランク軸及び駆動軸の接続を遮断した後、エンジンを始動させる(S104,105,107,108)。
(もっと読む)
自動クラッチのトルク伝達開始点学習方法及びトルク伝達開始点学習装置
【課題】車両の走行中であってもトルク伝達開始点の学習動作を可能にしながらも、運転者の意思を反映した車両走行状態を得ることができる自動クラッチのトルク伝達開始点学習方法及びトルク伝達開始点学習装置を提供する。
【解決手段】ダウンシフト時における自動クラッチ2の接続動作の前に、運転者の加速意思及び減速意思を確認し、加速意思がある場合にはブリッピング回転数を高く、減速意思がある場合にはブリッピング回転数を低くそれぞれ設定する。これにより、減速意思がある際に信頼性の高いトルク伝達開始点の学習動作を可能にし、加速意思がある場合には、その加速意思を優先した自動クラッチ2の接続動作が行える。
(もっと読む)
1 - 20 / 30
[ Back to top ]