
Fターム[3J070CC25]の内容
Fターム[3J070CC25]に分類される特許
1 - 9 / 9
左右連動操作装置
【課題】左右グリップの間に操作ガタを発生し難くすることができる左右連動操作装置を提供する。
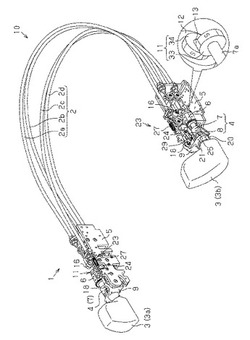
【解決手段】左右のグリップ3a,3bは、ユニバーサルジョイント4と4本のワイヤーケーブル2a〜2dとを介して連結される。グリップ3a,3bは、一方の操作がワイヤーケーブル2a〜2dを介して他方に伝達されることにより、左右のグリップ3a,3bが連動する。ユニバーサルジョイント4の出力軸と、ワイヤーケーブル2a,2bに繋がる可動片12とを、一対の磁石33,34からなる磁気式クラッチ11により連結する。そして、グリップ3a,3bが過荷重操作されたときには、磁気式クラッチ11により左グリップ3bを空転させ、過荷重をグリップ3a,3bから逃がすようにする。
(もっと読む)
左右連動操作装置

【課題】左右グリップの間に操作ガタを発生し難くすることができる左右連動操作装置を提供する。
【解決手段】左右連動操作装置のグリップは、グリップ支持部に連結されたアーム9に回動可能に支持されている。アーム9とアームシャフト34との間の空隙部36aには、磁性流体38が充填されている。そして、グリップが過荷重操作されたときには、コイル39を通電することにより磁性流体38に磁界をかけ、磁性流体38を固化する。よって、グリップがアーム9に固定され、過荷重がアームシャフト34の先のユニバーサルジョイント4に至らなくなる。
(もっと読む)
左右連動操作装置
【課題】装置を小型化することができる左右連動操作装置を提供する。
【解決手段】グリップ支持部に一体取り付けされた軸部材32に、筒部材33を一体回動可能に取り付け、この筒部材33をグリップに連結する。軸部材32の上下の溝35a,35bには、スライダ部材36a,36bが連結され、これらスライダ部材36a,36bにワイヤーケーブル2a,2bが各々取り付けられる。筒部材33の上下には長孔38a,38bが形成され、これら長孔38a,38bに各スライダ部材36a,36bの当接ピン37a,37bが連結される。そして、グリップが回動操作されると、筒部材33がグリップと一体回動し、長孔38a,38bが当接ピン37a,37bを押し、スライダ部材36a,36bがスライド移動する。これにより、グリップの回転操作がワイヤーケーブル2a,2bの押し引きの動作に変換される。
(もっと読む)
左右連動操作装置
【課題】左右グリップの間に操作ガタを発生し難くすることができる左右連動操作装置を提供する。
【解決手段】グリップが通常荷重で操作されたときには、リンクユニット35自体がワイヤーケーブル2と一体に直線移動することにより、左右の一方のグリップの操作力が他方に伝達し、左右のグリップが連動する。一方、グリップが過荷重で操作されたときには、カム部材38が回動するとともに一対のリンク部材43,44が開き状態をとることにより、ワイヤーケーブル2が見かけ上、長くなる。このため、ワイヤーケーブル2から過荷重が逃がされるので、ワイヤーケーブル2に伸びが生じ難い。
(もっと読む)
左右連動操作装置
【課題】ユニバーサルジョイントを用いずに左右の操作部を良好に連動させることができ、ユニバーサルジョイントのがたつき発生による不具合を防止する。
【解決手段】左操作部8と右操作部9との間に左右連動機構10を備える。例えば左操作部8の左グリップ8aを第1軸線12を中心に矢印A方向へ回動操作すると、その回動操作力は、左第1傘歯車20、左第2傘歯車22、左第1平歯車24、左第2平歯車25、第1線条部材41,42、右第2平歯車35、右第1平歯車34、右第2傘歯車32、右第1傘歯車30を介して右操作部9に伝達されて、右グリップ9aが左グリップ8aと同様の操作方向に動作する。また、左操作部8を第2軸線16を中心に矢印B方向へ揺動操作すると、その揺動操作力は、左回転体27、第2線条部材43,44、右回転体37を介して右操作部9に伝達されて、右操作部9が左操作部8と同様の操作方向に動作する。
(もっと読む)
左右連動操作装置
【課題】左右の操作手段に各々設けた操作量検出手段から得る出力値においてその誤差を低減させることができる左右連動操作装置を提供する。
【解決手段】左右連動操作装置は、操作者が手にするグリップ4,5が左右両側に一対配置され、一方に生じた操作力を他方に連動性を持って伝達可能な連動操作伝達機構により、2つのグリップ4,5のうち一方を操作すると他方もそれに追従するように同方向に連動して動き、2つのグリップ4,5の各々の操作量を検出可能である。左右連動操作装置は、グリップ4,5の操作有無を検出するタッチセンサ30,31と、操作状態を判定する操作状態判定部37aと、操作状態判定部37aによって片手操作を検出した際、操作されていない側のグリップ4,5に設けられたロータリエンコーダ33,35及びポテンショメータ34,36の出力値を補正する補正部37bとを備えた。
(もっと読む)
運搬車のスロットル操作装置
【課題】運搬車や、移動農作業機等にあっては、走行時にスロットルレバーを所定の位置で保持できる機構を有するスロットルレバーが用いられることが多い。このような形態において、エンジンを高速回転に設定しているとき、ブレーキ操作をしてもエンジントルクが強いためにブレーキが効き難いことがあり、咄嗟のときは危険である。
【解決手段】摩擦機構3を介して操作設定位置を維持可能のスロットルレバー2と、ブレーキ連動のブレーキレバー4を、スプリング5を介して連動構成して、ブレーキ操作を行うことによってこのスロットルレバー2の設定位置に拘らずエンジン回転を下げると共に、該ブレーキレバー4を制動解除することにより、スプリング5によりスロットルをスロットルレバー2による操作設定位置へ復帰することを特徴とする運搬車のスロットル操作装置。
(もっと読む)
入力装置のための力のフィードバック
入力装置の接触表面の動作を認識させるために感知可能なフィードバックを指に提供し、形状記憶金属による細長い少なくとも3つの部材を備える入力システム、方法、および、入力装置。少なくとも3つの部材のそれぞれは、少なくとも1つの付勢手段と協働し、フィードバックが指に付与されたときには、互いに異なる方向に収縮するように構成されている。  (もっと読む)
(もっと読む)
並進3自由度を提供する平行運動伝達構造を有する運動伝達装置
本発明は、並進3自由度を提供する平行運動伝達構造(3)を有する運動伝達装置に関し、上記構造は、1つのベース部材(1)と、1つの可動部材(2)と、ベース部材(1)上に配置される少なくとも1つの回転アクチュエータ(30)と、ベース部材を可動部材に連結する、それぞれが枢動制御アーム(10)を備える平行運動チェーンとを備える。少なくとも1つの回転アクチュエータ(30)の回転運動は、可動部材の並進運動が制御アームの回転運動に、又は制御アームの回転運動が可動部材の並進運動に伝達されるように、各枢動制御アーム(10)に伝達される。少なくとも1つの回転アクチュエータ(30)は、その軸(31)が制御アーム(10)の回転軸に対してほぼ垂直であるように配置される。平行運動伝達構造は、3つの平行運動チェーンを備え、各チェーンは、枢動制御アームと、一端が回転2自由度継手によって制御アームの端に、他端が可動部材にヒンジ式に取り付けられることによりデルタタイプの配置を形成する、一対の平行リンク棒とを備える。各チェーンには各回転アクチュエータが設けられ、回転アクチュエータは、その軸が互いに対してほぼ平行であるように配置される。回転アクチュエータと制御アームとの間の運動は、ケーブル部材(51)によって伝達される。  (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]