
Fターム[3J102CA12]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 目的又は効果 (1,371) | 一般的な目的又は効果 (1,113) | 異常検出 (20)
Fターム[3J102CA12]に分類される特許
1 - 20 / 20
磁気浮上式真空ポンプ、振れまわり推定方法、ロータバランス検査方法および磁気軸受制御ゲイン調整方法
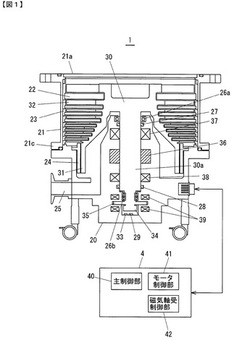
【課題】高速回転状態での振れまわり測定を行うことなく、波形振幅値を用いて振れまわりを容易に推定することができる振れまわり推定方法の提供。
【解決手段】磁気浮上式真空ポンプの振れまわり推定方法は、ロータ30を目標浮上位置に磁気浮上させる磁気浮上工程と、目標浮上位置に磁気浮上しているロータ30を複数の回転位置に順に停止させ、各停止時における2対の電磁石の電流をそれぞれ計測する電流計測工程と、2対の電磁石の少なくとも一方の対に関して、対を成す電磁石の電流の差分を複数の回転位置の各々について算出する差分算出工程と、ロータ30が一回転する間の差分の変化の振幅値を算出する振幅値算出工程と、予め得られている振れまわり量と振幅値との相関関係および振幅値算出工程で算出された振幅値に基づいて、ロータ30の振れまわり量を推定する推定工程と、を有する。
(もっと読む)
案内装置

【課題】ガイドレールに対してスライダを着座させる際の姿勢制御を有効に行える案内装置を提供する。
【解決手段】第1の支持面13aの凹部13dと第2の支持面13bの凹部13fとが、独立して流体の供給を中止可能な配管系即ち第1通路13h、第2通路13iを介して、圧縮空気源A,Bに接続されているので、例えばバルブV2を閉鎖して空気の供給を中断した場合、第2の支持面13bと第2の案内面12bとの隙間を維持しつつ、第1の支持面13aが第1の案内面12aに着座することができ、或いはバルブV3を閉鎖して空気の供給を中断した場合、第1の支持面13aと第1の案内面12aとの隙間を維持しつつ、第2の支持面13bが第2の案内面12bに着座することができ、これによりスライダ13を静止した際に、これに連結されたテーブル等に載置されたワークを精度良く位置決めすることができ、加工精度や検査精度を向上させることができる。
(もっと読む)
磁気浮上式真空ポンプ
【課題】コストアップを抑えつつ、回転体が過熱判定温度を超えたことを検知することができる磁気浮上式真空ポンプの提供。
【解決手段】磁気浮上式真空ポンプでは、ロータ30とロータシャフト33とが一体化された回転体はモータ36により回転駆動され、その回転体はラジアル磁気軸受37およびスラスト磁気軸受38を備える磁気軸受装置によって所定位置に磁気浮上している。そして、真空ポンプは、回転体を構成するロータシャフト33に熱的に接触するように設けられ、回転体を構成するロータ30の過熱判定温度に対応したキュリー温度Tcを有する磁性体41と、磁性体41を吸引して回転体に対して軸方向の力を作用する永久磁石40と、スラスト磁気軸受38の励磁電流を検出する電流センサと、電流センサで検出される励磁電流Iの変化から、回転体を構成するロータ30の温度が過熱判定温度を超えたか否かを判定する判定回路と、を備えている。
(もっと読む)
流体軸受構造及び形状検出装置
【課題】エア軸受構造15を備えた形状検出装置1のランニングコスト及び消費エネルギーを低減すること。
【解決手段】荷重作用領域FAに位置する複数の噴出孔25は、固定軸9の厚み方向TDに対して対応関係にあるロータ11の長手方向の中心11c側に傾斜し、対応関係にあるロータ11の長手方向の中心11cよりも左方側に位置する複数の第1傾斜噴出孔25Aと、対応関係にあるロータ11の長手方向の中心11cよりも右方側に位置する複数の第2傾斜噴出孔25Bとからなり、荷重作用領域FAから外れた領域に位置する複数の噴出孔25Cは、固定軸9の厚み方向TDに平行になっている。
(もっと読む)
工作機械
【課題】主軸装置と工作物とを相対移動させて工作物を加工する工作機械における、衝突時の損傷防止機能を提供する。
【解決手段】主軸2を保持する軸受け4を外輪ケース5により保持し、外輪ケース5は、衝突時の軸方向負荷が所定の値を超えたに場合に、転がり軸受け4主軸2と共に後方へ移動する。衝突検知センサ3により衝突を検知すると、所定時間内に主軸送りモータを停止させる。外輪ケース5の後退ストロークは、衝突開始から主軸送りモータが停止までに要する時間より衝突時の外輪ケース5の後退時間が長くなるように、設定されている。このことにより、主軸2と工作物11の衝突時に所定の値以上の力が転がり軸受け4に負荷されないので転がり軸受け4を損傷することなく工作機械を停止できる。
(もっと読む)
静圧気体軸受装置
【課題】 焼付きを生じ得る程度の被軸受部材と静圧気体軸受との接触を未然に防止することのできる静圧気体軸受装置及びこれに用いられる限界荷重検知装置を提供すること。
【解決手段】 静圧気体軸受装置1は、回転軸2の被軸受面3と協働して軸受隙間4を形成する軸受面5から被軸受面3に向かって噴出する高圧気体に基づく軸受隙間4における気体圧力により回転軸2を支える導電性の多孔質静圧気体軸受7と、回転軸2及び多孔質静圧気体軸受7に電気的に接続されると共に、軸受隙間4における回転軸2と多孔質静圧気体軸受7との電気的接触に基づいて回転軸2から多孔質静圧気体軸受7に加えられる負荷荷重が限界に至った旨を検知する限界荷重検知装置8と、回転軸2を回転駆動させる駆動手段9と、限界荷重検知装置8による検知に基づいて駆動手段9による回転軸2の回転駆動を制御する駆動制御手段10とを具備している。
(もっと読む)
スピンドルモータ及び穿孔加工装置
【課題】従来よりも微細な穴を形成する際に発生する微小な送り負荷を安定して測定することが可能なスピンドルモータを提供する。
【解決手段】筒状筐体110と、モータ120と、穿孔工具把持部150と、筒状筐体110内でモータ120の回転軸と一体になって回転可能で、かつ、モータ210の回転力を穿孔工具把持部150に伝達するための回転体であって、先端側軸受面及び基端側軸受面を有する鍔部134が外周部に形成された回転体130と、筒状筺体110に弾性部材240を介してかつ送り方向に沿って微動可能に固定され、鍔部134における先端側軸受面及び基端側軸受面を挟み込んで穿孔工具把持部150からの送り負荷を受ける空気静圧軸受220と、送り方向に沿った空気静圧軸受220の変位に基づいて送り負荷を測定する送り負荷測定装置140とを有するスピンドルモータ100。
(もっと読む)
気体軸受けの接触検知機構
【課題】 可動部が基台に接触した際にこの接触を確実に検知することのできる気体軸受けの接触検知機構を提供することである。
【解決手段】 基台に対して可動部を絶縁状態で支持する気体軸受けの接触検知機構であって、該基台に一端が接続された抵抗値R1を有する第1抵抗体と、一端が電源に接続され他端が該第1抵抗体の他端に接続された抵抗値R2を有する第2抵抗体と、一端が該第1及び第2抵抗体の他端に接続され、他端がグランドに接続された抵抗値R3を有する第3抵抗体と、該第3抵抗体の前記一端と他端との間の電位差を検出する電位差検出手段と、を具備したことを特徴とする。
(もっと読む)
軸受装置およびこれを備えた遠心圧縮機
【課題】部品点数を削減して低コスト化を図ることができる軸受装置を提供する。
【解決手段】軸受装置Bは、アキシアル磁気軸受13及びラジアルフォイル軸受14と、アキシアル磁気軸受13及びラジアルフォイル軸受14によって回転可能に支持された回転軸Sと、アキシアル方向Aにおける回転軸Sの変位を検出するための磁気センサ15とを備えている。回転軸Sは、磁性材料により形成されるとともに径が異なる2つの外周面20a,20bを有し、磁気センサ15は、ラジアル方向Rにおいて、2つの外周面20a,20bに対向して配置されている。
(もっと読む)
ターボ型真空ポンプ
【課題】回転翼と固定翼の隙間を小さくして排気性能を向上させることができ、回転軸の温度及び熱膨張量を正確に推定することを可能にし、また回転翼と固定翼とが接触する前に警報を発する、あるいは運転を停止させることができるターボ型真空ポンプを提供する。
【解決手段】回転軸54を磁気浮上させる少なくとも一対のアキシャル磁気軸受59,と、回転軸に取付けられた回転翼52と、回転翼と対向するように配置された固定翼53と、回転軸を回転駆動するモータ55とを備えたターボ型真空ポンプにおいて、回転軸の一方の端部近傍に回転翼と固定翼とを配置することにより排気部90を構成するとともに、回転軸の軸方向の位置を検出する第1のアキシャル変位センサ59とアキシャル磁気軸受58とを回転軸の他方の端部近傍に配置することにより運動制御部91を構成し、排気部の近傍に回転軸の軸方向位置を検出する第2のアキシャル変位センサ60を配置した。
(もっと読む)
磁気軸受装置
【課題】 磁気軸受使用装置を分解せずに回転体の異常を判定することにより、磁気軸受使用装置の稼働中であっても日常的に点検を実施することを可能とし、安全性および信頼性を向上させるとともに、メンテナンス費用を削減することができる磁気軸受装置を提供する。
【解決手段】 変位センサ8の出力に基づいて磁気軸受5,6,7の電磁石を制御するDSP17は、磁気軸受5,6,7に支持された状態の回転体4の周波数特性を求める周波数解析手段38と、回転体4の正常時の周波数特性F0を蓄える基準周波数特性記憶手段としてのフラッシュメモリ19と、点検のため周波数解析手段38によって周波数特性Fを求めこれとフラッシュメモリ19に蓄えられた周波数特性F0とを比較してその差が所定値より大きい場合に異常と判定する異常判定手段39とを有している。
(もっと読む)
磁気軸受装置
【課題】 ラジアル変位センサの異常をより確実に検出できる磁気軸受装置を提供する。
【解決手段】 磁気軸受装置は、回転体4をラジアル電磁石の磁気吸引力により互いに直交する2つのラジアル方向に非接触支持する制御型ラジアル磁気軸受6,7と、回転体4の上記2つのラジアル方向の変位を検出するための2対のラジアル変位センサを有する少なくとも1組のラジアル変位センサユニット24,25と、回転体4の上記2つのラジアル方向の変位に基づいてラジアル電磁石を制御するラジアル電磁石制御手段とを備えている。ラジアル変位センサのゲイン補正値およびオフセット補正値を求めて記憶するキャリブレーション時にこれらゲイン補正値およびオフセット補正値ならびに少なくとも1組のラジアル変位センサユニットにおけるラジアル変位センサ相互間のゲイン補正値の差に基づいてラジアル変位センサの異常を検出する異常検出手段が設けられている。
(もっと読む)
工作機械用磁気軸受装置
【課題】 工具の振れ回り量を高精度で測定することができる工作機械用磁気軸受装置を提供する。
【解決手段】 砥石9のラジアル方向の振れ回り量をラジアル位置センサ7a,7b,8a,8bの出力から求める振れ回り量検出回路24を備えている。振れ回り量検出回路24において、X軸方向の振れXtおよびY軸方向の振れYtが次式で求められている。
Xt={(X1−X10)+(X2−X20)}(L+Lt)/L−(X2−X20)
Yt={(Y1−Y10)+(Y2−Y20)}(L+Lt)/L−(Y2−Y20)
(もっと読む)
静圧空気軸受け監視装置及び静圧空気軸受け監視装置を備えたステージ装置
【課題】本発明は静圧空気軸受けがガイド面に非接触状態を維持しているか否かを監視することを課題とする。
【解決手段】ステージ装置10は、静圧空気軸受け22が非接触状態を維持しているか否かを監視する監視装置80を有する。監視装置80は、電圧検出回路82と、判定回路84と、報知手段86とを有する。電圧検出回路82は、複数の信号線66を介して静圧空気軸受け221〜223に電圧を印加し、信号線76からの電圧と比較して静圧空気軸受け221〜223と固定側電極60との電位差を検出する。判定回路84は、静圧空気軸受け221〜223と固定側電極60との電位差に応じた検出信号に基づいて静圧空気軸受け221〜223と固定側電極60との接触の有無を判定する。報知手段86は、判定回路84により静圧空気軸受け221〜223の何れかと固定側電極60との接触が発生したと判定された場合に報知する。
(もっと読む)
スピンドルユニット
【課題】被加工物に対して圧力が加えられて加工が行われる加工装置において、信頼性が高く経済性に優れた機構によって加工時の圧力を計測できるようにする。
【解決手段】加工装置に搭載されるスピンドルユニット30において、スラストベアリング305によって支持されるベアリングプレート309の第一のプレート面309aまたは第二のプレート面309bとの間の間隔に対応した出力を行う間隔対応出力手段312、313を備え、第一のプレート面309aまたは第二のプレート面309bとの間の間隔の変化を検知して回転軸に加わる荷重の変化を検出する。
(もっと読む)
磁気軸受装置のラジアル変位検出装置
【課題】 ラジアル変位センサに異常が発生しても重大な事故や故障の発生を防止できる安全は磁気軸受装置の変位検出装置を提供する。
【解決手段】 磁気軸受装置の変位検出装置5は、2つのラジアル制御軸上に位置するように周方向に等間隔をおいて配置された4個のラジアル変位センサ17a,17b,17c,17dと、ラジアル変位センサを駆動するとともにラジアル変位センサの出力から回転体の2つのラジアル制御軸方向の変位を演算する駆動演算手段22とを備えている。駆動演算手段が、各ラジアル変位センサを個別に駆動して、各ラジアル制御軸上の2つのラジアル変位センサの出力からそのラジアル制御軸方向の回転体の変位を演算し、いずれかのラジアル変位センサの出力に異常が生じたときに、そのラジアル変位センサの出力として所定の擬似出力値を設定するものである。
(もっと読む)
磁気軸受装置
【課題】 製品の出荷後であっても、出荷した製品ごとに障害の発生の有無を検知することができ、経年変化に起因する障害の発生を予見することができる磁気軸受装置を提供する。
【解決手段】 回転体が、複数対の電磁石の磁力により、回転体の中心軸方向及び回転体の中心軸のラジアル方向に非接触支持され、磁気浮上するよう構成してある磁気軸受装置において、自装置を他装置と識別する固有の識別情報を記憶しておき、回転体を中心軸方向及び複数のラジアル方向の両側から挟むように配置された複数対の電磁石に対する回転体の位置を検出して位置検出信号を出力し、出力した位置検出信号に基づいて、回転体の挙動が異常であるか否かを判定し、回転体の挙動が異常であると判定した場合、回転体の挙動が異常である旨を示す異常信号及び識別情報を記憶し、又は外部へ送出する。
(もっと読む)
回転軸支持装置
【課題】 ヒューズ切れを容易に判断できて、メンテナンスがし易い回転軸支持装置を提供すること。
【解決手段】 電磁石X1,X1’を駆動する電磁石駆動回路5,6が有しているヒューズのヒューズ切れを検出するヒューズ切れ検出回路7を形成する。上記ヒューズ切れ検出化回路7を、及ぼす力の力線方向が同一である対をなす電磁石X1,X1’を駆動する二つの電磁石駆動回路5,6の対毎に一つずつ形成する。
(もっと読む)
磁気軸受装置
【課題】 保護軸受の交換時期をより正確に判定できる磁気軸受装置を提供する。
【解決手段】 磁気軸受装置は、電磁石26,27,28の磁気吸引力により回転体4をアキシアル方向およびラジアル方向に非接触支持する磁気軸受5,6,7と、回転体4のアキシアル方向およびラジアル方向の変位を検出する変位検出手段8と、タッチダウン用の保護軸受11,12と、変位検出手段8による変位検出値に基づいて磁気軸受5,6,7の電磁石26,27,28を制御する制御手段とを備えている。制御手段が、回転体4のタッチダウンの回数をカウントして記憶するカウント手段と、磁気軸受5,6,7の起動時に保護軸受11,12に対する回転体4のアキシアル方向およびラジアル方向のクリアランスを検出する手段と、カウント手段に記憶されたタッチダウン回数のカウント値および上記クリアランスの検出値に基づいて保護軸受11,12が交換時期に達したかどうかを判定する判定手段とを備えている。
(もっと読む)
磁気浮上装置
【課題】 磁気浮上装置を特殊な構造としたり、特殊な加工を施すことなく、且つ特別なメンテナンスを必要とせず、制御対象体の温度を検出できる、装置の安全な運転を確保できる磁気浮上装置を提供すること。
【解決手段】 相対向して配置された一対の電磁石11、13と、該一対の電磁石11、13の間に配置された制御対象体15と、相対向して配置され該制御対象体15の位置変位を検出する位置変位検出センサ12、14を具備し、該位置変位検出センサ12、14の検出信号を位相補償及びゲイン調整する制御回路部20に入力し、該制御回路部20からの制御出力で、一対の電磁石11、13の磁気吸引力或いは磁気反発力を制御し、制御対象体15を該一対の電磁石11、13間の任意の位置に非接触で浮上支持制御する磁気浮上装置において、位置変位検出センサ12、14の検出信号により、制御対象体15の外形寸法を検出し該制御対象体の温度を検出する温度演算回路部30を設けた。
(もっと読む)
1 - 20 / 20
[ Back to top ]